基于ID卡定位的智能汽車自主導航系統設計
2017-08-16 09:33:33許金鋼牛珊珊唐曉偉周亞羅
電子測試 2017年14期
許金鋼,牛珊珊,唐曉偉,周亞羅
(華北理工大學電氣工程學院,河北唐山,063000)
基于ID卡定位的智能汽車自主導航系統設計
許金鋼,牛珊珊,唐曉偉,周亞羅
(華北理工大學電氣工程學院,河北唐山,063000)
基于智能汽車的發展,本文設計了一種智能車的自主導航系統。該系統以ID卡定位為主導,模擬GPS系統來實現自主導航功能,以達到小車尋跡到達指定位置的目的。通過調試,小車可根據路面情況進行尋跡避障和定位,導航精度在3厘米之內。
自主導航系統;ID卡定位;尋跡
0 引言
隨著社會的快速發展,小車越來越普及,并且成為人們生活中必不可少的交通工具,研究小車自主導航系統,是對小車性能提出的更高的要求。系統以ID卡識別定位為基礎,實現了自主尋跡、紅外避障、準確定位的功能。小車自主導航系統的發展是時代進步的要求,也是汽車行業未來發展的一個很好趨勢。
1 系統的總體方案設計
自主導航系統是在實驗室條件下研究小車的自主駕駛導航問題。以模型小車代替汽車,在2m*3m的泡沫板上規劃網格形式的路徑代表實際公路網,每個交叉點埋ID卡扣,用來表示實際地理坐標。首先設定終點坐標,然后在道路上任一點啟動小車,小車通過尋跡功能會沿當前道路行進,當到達路口時讀取路口坐標信息,與終點坐標比對,規劃出行進方向。每到達一個路口,進行一次坐標比對,直到與終點坐標匹配,小車到達目的地,停止導航和行進。小車在行駛過程中可以實時顯示終點坐標和當前坐標,當道路上有障礙物時,可以合理躲避。
2 硬件介紹
2.1 ATmega128芯片
基于對系統的性能和成本考慮,本系統采用ATmega128A作為主控芯片。ATmega128A是ATMEL公司的8位系列單片機的較高配置的一款單片機,穩定性極高,它具有高可靠性、功能強、高速度、低功耗、高性價比等優點,被廣泛的應用在了汽車電車管理、門禁系統、遙控器、智能家居、以及計量電表等領域。
2.2 ID卡識別定位模塊
ID卡全稱為身份識別卡(Identification Card),是一種不可寫入的感應卡,含固定的編號。ID卡是“感應式磁卡”,卡內除了卡號外,無任何保密功能,其“卡號”是公開、裸露的。我們在每一個路口會安放相應的ID卡,并且通過軟件設計給其賦予相應的坐標值,系統通過線圈來讀取ID卡卡號,然后與目的地坐標進行對比,每讀一次卡,比較一次,直到坐標值相等汽車停下,導航結束。
2.3 直流電機和舵機驅動模塊
本設計采用L298作為驅動芯片驅動直流電機和舵機。它的最大的輸出電流是2A。1個芯片里包含了2個H橋,可以驅動兩個電機實現正反轉。本系統中,直流電機用來驅動小車前進,舵機用來控制轉向。
2.4 光電尋跡模塊
RPR220是一種一體化反射型光電探測器,其發射器是一個砷化鎵發光二極管,而接收器是一個高靈敏度,硅平面光電三極管。該模塊用于自主尋跡,控制小車沿給定路線前進。
2.5 數碼管顯示模塊
數碼管顯示模塊采用一塊四位一體的數碼管,利用一片具有串并轉換功能的芯片74HC595驅動,采用動態顯示方法,既提高了顯示效率,又節省了IO口資源。小車行進過程中,數碼管顯示模塊實時顯示小車的終點坐標和當前坐標。
2.6 紅外避障模塊
當檢測到障礙物時,紅外光敏二極管接收到反射回來的紅外光,其輸出立即發生高低電平轉換,該信號經放大器放大后送到單片機進行分析處理。然后將處理后的結果發送到電機驅動模塊,進行校正。控制小車作出相應的向左或向右的規避動作。
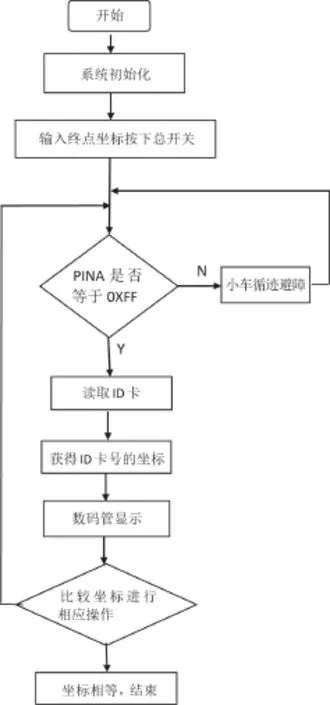
圖1 控制程序流程圖
3 軟件介紹
本系統主要是通過以ATmega128單片機為核心控制模塊來實現汽車的自主導航。單片機系統依據RPR220探測器尋跡時會產生電平變化,從而驅動舵機轉動不同角度,實現了小車的自主尋跡功能。在此基礎上我們設定目的地的坐標,使用ID卡讀取當前汽車的坐標,通過當前坐標與目的地坐標進行對比,來控制汽車的走向,準確的實現汽車的自主導航。到達指定位置汽車的語音芯片會發出聲音,進行提示。程序流程如圖1所示。
4 結束語
本系統完成了自主導航系統的硬件和軟件設計,經測試小車能根據設置的終點坐標準確避開鐵塊、水瓶等障礙物到達目的地,到達目的地時誤差在3厘米之內。
[1]楊帆.無人駕駛汽車的發展現狀和展望[J].上海汽車.2014(03):35-40.
[2]宋潔.無人駕駛智能車路徑引導的研究[D].西安:西北工業大學,2013.
[3]尹念東.智能車輛的研究及前景[J].上海汽車.2002.2.
[4]陳鐵軍.智能控制理論及應用[M].北京:清華大學出版社,2009.1.
Autonomous Navigation System of intelligent vehicle based on ID card positioning
Xu Jingang,Niu Shanshan,Tang Xiaowei,Zhou Yaluo
(College of Electrical Engineering, North China University of Science and Technology, Tangshan Hebei,063000)
Based on the development of intelligent vehicle, an autonomous navigation system of intelligent vehicle is designed in this paper.To achieve the purpose of the car tracing to designated position,this system employs ID card positioning as dominant element;simulates GPS system to realize the autonomous navigation function.By debugging,the car is able to avoid obstacles by tracing and to fix position. What’s more,the navigation accuracy can be controlled within 3 centimeters.
Autonomous Navigation System;ID card positioning;tracing
許金鋼(1978),男,碩士,講師,研究方向:機電一體化技術。
周亞羅,女,華北理工大學副教授,研究方向:復雜系統的建模與控制。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
電子設計工程(2015年15期)2015-02-27 12:07:30