基于MFC的懸臂梁振動抑制設計與試驗研究
2017-08-17 12:02:14畢鳳霞時軍委蘇成利
載人航天 2017年4期
關鍵詞:振動
畢鳳霞,時軍委,史 航,蘇成利
基于MFC的懸臂梁振動抑制設計與試驗研究
畢鳳霞1,時軍委2,史 航2,蘇成利1
(1.遼寧石油化工大學信控學院,遼寧113000;2.上海宇航系統工程研究所,上海201109)
為研究壓電材料MFC在太陽電池翼等低頻梁板結構振動抑制中的應用,搭建壓電懸臂梁試驗系統,辨識得到系統傳遞函數,分別設計了位移開關控制器、速度開關控制器以及根軌跡控制器,對控制器的實際振動抑制效果進行了試驗,試驗結果表明系統阻尼比由原來的4%分別上升為3%、6%和5%,表明所設計的控制器在壓電懸臂梁的一階彎曲模態振動抑制中控制效果明顯,分析了三種控制效果產生差異的原因,其中速度開關控制效果最好。
壓電纖維復合材料;懸臂梁;振動抑制;試驗研究
1 引言
太陽電池翼是一種獨立于航天器本體的梁板結構,廣泛應用于衛星、載人飛船、行星探測器和空間站等航天器。隨著航天技術的發展,航天器所需功率越來越大,太陽電池翼面積增加,但重量不能無限制地增加。因此,太陽電池翼須向輕量化方向發展,出現了各種大型輕質太陽電池翼[1]。大型輕質太陽電池翼屬于柔性結構,在空間環境極易受外界干擾而引起結構振動,而大型太陽電池翼尺度大、質量輕、剛度低,因此其固有頻率低、阻尼弱,加上外層空間為無阻環境,受外界激勵的影響后,容易引起持續而強烈的振動,很難衰減[2],對飛行器的穩定性和指向精度產生影響。因此為提高飛行器指向精度和穩定度,必須對其進行振動抑制。
用于振動抑制的作動器材料有形狀記憶合金、電(磁)流變體、超磁致滯伸縮材料和壓電材料等[3]。Bailey等人[4]將聚偏氟乙烯(PVDF)作為分布式作動器抑制衛星結構上的懸臂梁振動。劉巍[5]利用超磁致伸縮薄膜進行了懸臂梁的振動抑制試驗驗研究。王修勇[6]基于磁致伸縮作動器進行了拉索的多級開關控制和仿真分析。吳大方[7]等針對太陽能帆板等柔性懸臂梁結構,以壓電陶瓷為作動器,對大柔性懸臂梁的前三階模態進行了控制。李東旭[8]將分散控制方法引入太陽電池翼結構振動控制問題,并利用壓電陶瓷設計控制器,獲得較為滿意的效果。季宏麗[9]基于同步開關阻尼技術(SSD)技術設計了開關電路,通過使壓電片上的電壓翻轉達到振動抑制的目的,并研究了開關延時對控制效果的影響。侯志偉[10]在飛機垂尾的減振試驗中對比了壓電纖維復合材料(Macro Fiber Composite,MFC)和鋯鈦酸鉛(PZT)壓電薄膜兩種壓電作動器的效果。
上述研究大多比較不同作動器對控制效果的影響,對不同控制算法影響的研究較少。因此,本文針對MFC壓電作動器,對比位移開關控制、速度開關控制和根軌跡控制三種策略對外部擾動引起的彎曲振動主動抑制的效果以及產生差異的原因。由于太陽電池翼結構十分復雜,模型建立及分析研究相對困難,作為合理簡化,采用能夠反映太陽翼梁板結構形式以及基頻為彎曲振動的特點的低頻、柔性懸臂梁[11]。
2 壓電梁介紹
懸臂梁尺寸如圖1所示,材料為鋼,壓電作動器粘貼在懸臂梁根部。
其中,試驗所采用的MFC參數如表1所示。
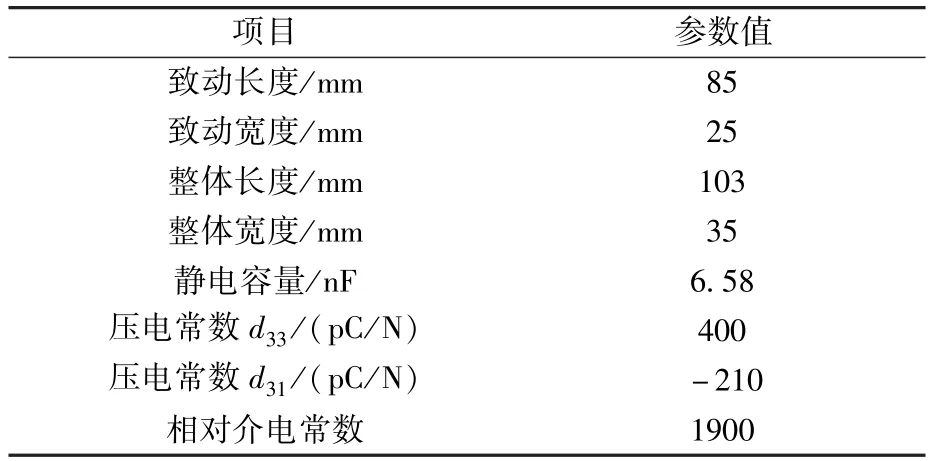
表1 MFC主要工作參數Table 1 Working parameters of MFC(M?8528?P1)
3 系統辨識和控制器設計
3? 1 系統建模
給系統輸入幅值±300 V,頻率從0? 1 Hz線性變化到5 Hz,時長300 s的掃頻正弦波,記錄掃頻電壓信號和傳感器信號,采樣頻率200 Hz。辨識得到系統傳遞函數為式(1):
由式(1)可以得到,系統的一階頻率為2? 89 Hz,系統阻尼比4‰,系統Bode圖如圖2所示。
3? 2 控制器設計
系統的控制框圖如圖3所示,設定值r為零,被控對象G(s)為懸臂梁,激光位移傳感器H(s)用來檢測懸臂梁末端位移,試驗目的是通過設計合適的控制器C(s)使懸臂梁受到外界擾動后能快速回到穩定狀態。
設計如下三種控制器:
1)位移開關控制器:如圖4所示,設置位移信號閾值為0? 05 V,當傳感器電壓值超過0? 05 V時,給作動器施加-500 V電壓;當傳感器電壓值低于-0? 05 V時,給作動器施加500 V電壓;傳感器電壓值在±0? 05 V內,作動器不施加驅動電壓。
2)速度開關控制器:如圖5所示,由位移信號作差分求得速度信號,設置速度傳感信號閾值為±1 V/s,其余設置類似位置開關控制。
3)根軌跡控制器:基于辨識后的系統傳遞函數G(s)設計根軌跡控制器為式(2):
經過根軌跡控制器補償后阻尼比為38%。
4 系統試驗驗證
4? 1 試驗系統組成
系統實物圖如圖6所示。主要由以下儀器設備組成:1)懸臂梁;2)壓電纖維(MFC)作動器;3)PC機控制器;4)數據采集卡NI?myRIO;5)壓電驅動器;6)激光位移傳感器。
以NI?myRIO為核心,PC機由LabVIEW開發任務和數據管理程序,激光位移傳感器信號接入NI?myRIO,產生MFC電壓控制指令,由壓電驅動器實施電壓驅動,從而抑制懸臂梁結構的振動。
4? 2 工況和試驗結果
由于受到傳感器量程的限制,試驗分別對懸臂梁末端位移10 mm自由衰減和受控衰減進行測試,結果如下。
圖7 為自由震蕩衰減曲線。實線為自由衰減曲線,點畫線為阻尼包絡曲線,阻尼比為4%,阻尼包絡線的方程為y1,t()=4.6e-0.004ωnt。
圖8 為位移開關控制的受控衰減曲線和控制電壓曲線。上圖虛線為自由衰減曲線,實線為受控振動曲線,點畫線為阻尼包絡曲線,由曲線可得阻尼比為3%,阻尼包絡線的方程為y(1,t)=4? 6e-0?03ωnt;下圖曲線為控制電壓曲線,幅值范圍為-500 V~+500 V。
圖9 為速度開關控制的受控衰減曲線和控制電壓曲線。上圖虛線為自由衰減曲線,實線為受控振動曲線,點畫線為阻尼包絡曲線,由曲線可得阻尼比為6%,阻尼包絡線的方程為y1,t()=4? 8e-0.06ωnt;下圖曲線為控制電壓曲線,幅值范圍為-500 V~+500 V。
圖10 為根軌跡控制的受控衰減曲線和控制電壓曲線。實線為自由衰減曲線,點畫線為阻尼包絡曲線,阻尼比為5%,阻尼包絡線的方程為y1,t()=4.8e-0.05ωnt。
由上述分析可知,受到同樣的擾動后,系統在無控和有控情況下的衰減阻尼比有明顯的變化,如表2所示:在位移開關控制、速度開關控制和根軌跡控制器作用下系統阻尼比由原來的4%上升為3%、6%和5%,抑制效果明顯。根軌跡控制由于受到MFC壓電片作動電壓限幅影響,控制力限定在與前兩種方法相同的范圍內,其控制力的相位與速度開關控制力相位比較接近,因此效果基本接近速度開關控制。
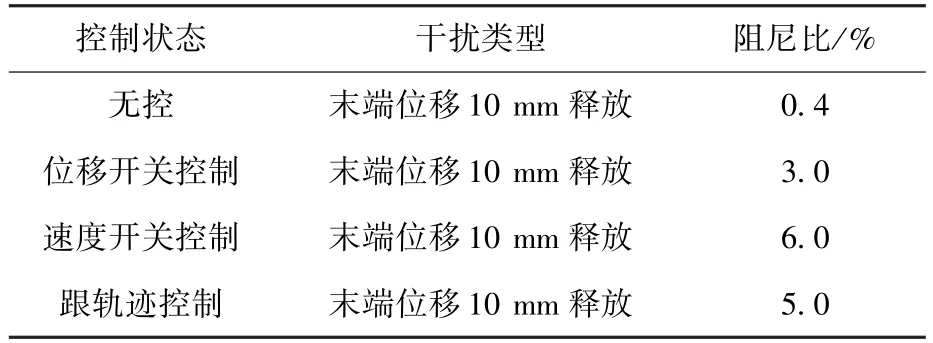
表2 系統在有控和無控情況下的阻尼變化Table 2 Damping variation of the system under con?trolled and uncontrolled conditions
5 結論
本文基于MFC設計了三種控制器,通過低頻懸臂梁的振動抑制試驗和數據分析,得到如下結論:
1)開關控制簡單易行,不需要獲得被控對象準確的數學模型,基于速度的開關控制效果優于基于位置的開關控制。位置反饋情況下MFC的作用類似一種復剛度阻尼,由于MFC本身的彈性模量(30 GPa)比梁的彈性模量(200 GPa)低,所以位移開關控制的效果要差一些,之所以還有些效果是因為梁本身比較薄。當位移開關控制應用在類似太陽電池翼的大型結構時,其效率明顯不如速度開關控制。
2)速度反饋情況下MFC的作用力直接與速度相關,類似一種粘性阻尼,根據結構動力學原理同樣的作用力要比位置反饋效果明顯。
3)根軌跡控制律設計結果表明其能提供很大的受控阻尼,但受作動器能力飽和的限制,實際阻尼比為5%,遠低于設計值38%。進一步分析,控制力的相位與速度開關控制力相位比較接近,因此效果基本接近速度開關控制。根軌跡控制器依賴于準確的系統數學模型,沒有速度開關控制簡單實用。
(References)
[1] 張新民.智能材料研究進展[J].玻璃鋼/復合材料,2013(6):57?63.Zhang Xinmin.Advances in Intelligent Materials Research[J].Fiber Reinforced Plastics/Composites,2013(6):57?63.(in Chinese)
[2] 李東旭.撓性航天器結構動力學[M].北京:科學出版社,2010:67?69.Li Dongxu.Structural Dynamics of Flexible Spacecraft[M].Beijing:Science Press,2010:67?69.(in Chinese)
[3] 薛偉辰,鄭喬文.結構振動控制智能材料研究及應用進展[J].地震工程與工程振動,2006,26(5):213?217.Xue Weichen,Zheng Qiaowen.Advances in research and ap?plication of intelligent materials for structural vibration control[J].Earthquake Engineering and Engineering Dynamics,2006,26(5):213?217.(in Chinese)
[4] Bailey T,Hubbard E J.Distributed piezoelectric?polymer ac?tive vibration control of a cantilever beam[J].Journal of Guidance Control&Dynamics,2015,8(5):605?611.
[5] 劉巍,劉雙軍.超磁致伸縮薄膜懸臂梁的非線性振動特性試驗研究[J].新技術新工藝,2010(10):92?96.Liu Wei,Liu shuangjun.Experimental study on nonlinear vi?bration characteristics of giant magnetostrictive thin cantilever beam[J].New Technology and New Process,2010(10):92?96.(in Chinese)
[6] 王修勇,李建強.拉索?磁致伸縮作動器系統PID控制仿真分析[J].噪聲與振動控制,2016,36(6):115?120.Wang Xiuyong,Li jianqiang.Simulation and analysis of PID control for magnetostrictive actuator system[J].Noise and Vi?bration Control,2016,36(6):115?120.(in Chinese)
[7] 吳大方,房元鵬,宋昊.大柔性懸臂梁獨立模態振動主動控制試驗研究[C]//第十一屆全國試驗力學學術會議論文匯編,2005.Wu Dafang,Fang dapeng,Song Hao.Experimental study on active vibration control of large flexible cantilever beam with independent modal vibration[C]//Proceedings of the Elev?enth National Conference on experimental mechanics,2005.(in Chinese)
[8] 李東旭.大撓性多體太陽能電池翼結構振動分散控制試驗研究[C]//全國振動與噪聲高技術及應用會議,2007.Li Dongxu.Experimental study on vibration control of large flexible multi cell solar panels[C]//Proceedings of the Na?tional Conference on High Vibration and Noise Technology and Applications,2007.(in Chinese)
[9] 季宏麗,裘進浩.基于壓電元件的半主動振動控制的研究[J].振動工程學報,2008,6(21):614?619.Ji Hongli,Qiu Jinhao.Study on semi?active vibration control based on piezoelectric element[J].Journal of Vibration Engi?neering,2008,6(21):614?619.(in Chinese)
[10] 侯志偉.基于壓電元件的半主動振動控制的研究壓電纖維復合材料在結構減振中的應用[J].振動測試與診斷,2010,8(30):51?54.Hou Zhiwei.Research on semi?active vibration control based on piezoelectric element.Application of piezoelectric fiber composite in vibration reduction of structures[J].Vibration Test and Diagnosis,2010,8(30):51?54.(in Chinese)
[11] 蔣建平,李東旭.壓電復合梁高階有限元模型與主動振動控制研究[J].動力學與控制學報,2007,5(2):141?146.Jiang Jianping,Li Dongxu.Research on high order finite ele?ment model and active vibration control for piezoelectric com?posite beams[J].Journal of Dynamics and Control,2007,5(2):141?146.(in Chinese)
(責任編輯:龍晉偉)
Design and Study of Cantilever Beam Vibration Control Based on Macro?fiber Composites
Bi Fengxia1,Shi Junwei2,Shi Hang2,Su Chengli1
(1.Liaoning Shihua University,Liaoning 113000,China;2.Aerospace System Engineering Shanghai,Shanghai 201109,China)
To study the vibration suppression technique of piezoelectric material for solar arrays with relative low natural frequencies,an experiment system for the piezoelectric cantilever beam was built.The transfer function of the system was identified and the on?off controllers based on displace?ment,velocity and root locus collector were designed.The performance of the controllers was inves?tigated and the results showed that the damping ratio of the systems with the displacement?based on?off controller,the velocity?based on?off controller and the root locus controller were increased from 4%to 3%,6%and 5%respectively.It indicates that the proposed collectors can successfully re?duce the first order modal vibration of the cantilever beam.The reasons for the difference in control performance were analyzed,of which the velocity?based collector was the best.
macro fiber composite;cantilever beam;vibration control;experimental research
V19
A
1674?5825(2017)04?0493?05
2017?02?28;
2017?06?29
國家自然科學基金(11502148)
畢鳳霞,女,碩士研究生,研究方向為振動抑制。E?mail:bi_feng520@163.com
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00