基于Matlab/Simulink的四輪轉向車輛操縱穩定性仿真研究
2017-09-03 10:02:39姚廣磊王保華
福建質量管理 2017年10期
姚廣磊 王保華
(湖北汽車工業學院汽車工程學院 湖北 十堰 442002)
基于Matlab/Simulink的四輪轉向車輛操縱穩定性仿真研究
姚廣磊 王保華
(湖北汽車工業學院汽車工程學院 湖北 十堰 442002)
本文借助于Matlab/Simulink工具,對采用兩種經典控制方法的二自由度四輪轉向車輛和二自由度傳統前輪轉向車輛進行了建模與仿真分析,仿真時以前輪轉角作為輸入,通過比較四輪轉向車輛與傳統前輪轉向車輛的質心側偏角、橫擺角速度、側向加速度角階躍響應曲線,研究了這兩種控制方法對四輪轉向車輛操縱穩定性的影響。對比分析三個評價指標的響應曲線,結果表明該四輪轉向車輛改善了低速轉向時的輕便性和高速轉向時的操縱穩定性。
四輪轉向;兩輪轉向;二自由度;角階躍輸入;比例前饋;橫擺反饋;操縱穩定性
引言
隨著科技的進步現在交通系統獲得了快速發展,使得人們對汽車速度的要求越來越高,同時要求汽車的快速反應能力也應相應地提高,而四輪轉向技術正在被作為一種有效手段應用于改善汽車的操縱穩定性和機動性。所謂四輪轉向是指汽車轉向過程中,四個車輪可根據前輪或行車速度等信號同時相對車身偏轉。四輪轉向汽車的后輪可以與前輪同向偏轉,也可以反向偏轉。在中低速時,實現前后輪異向轉向,減小轉彎半徑,提升汽車的機動性和靈活性;在高速時,通過前后輪同向轉向,使汽車變道更加迅速,循跡跟蹤能力增強,同時可以有效避免側滑和甩尾現象的出現[1]。
四輪轉向汽車的動態仿真對于改進轉向系統的設計和評價汽車的操縱穩定性具有重要的意義。由于轉向系統力學特性的復雜,傳統利用微分方程和差分方程建模進行動態仿真的方法需要大量編程,工作量大、效率低、并且不能很好地滿足仿真需要。Matlab中的Simulink工具箱可以方便地對四輪轉向汽車操縱穩定性的動態特性進行仿真,因此可以根據車輛的動力學方程,利用simulink工具箱搭建4WS汽車動態仿真模型,驗證和分析其操縱穩定性能。
一、四輪轉向車輛的動力學模型
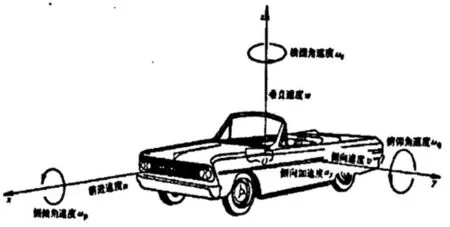
圖1 車輛坐標系與汽車主要運動形式

圖2 四輪轉向汽車二自由度模型
我們在研究4WS汽車對轉角輸入的響應時,為了便于掌握穩定的基本特性,我們將將其簡化為線性二自由度模型進行分析研究,分析中忽略轉向系統的影響,以前、后輪轉角作為輸入,忽略懸架作用,認為汽車車廂只作平行于地面的平面運動,即汽車沿z軸的位移,繞y軸的俯仰角與繞x軸的側傾角均為零,忽略其他方面的因素影響,車輛坐標系與汽車主要運動形式如下圖1所示,最終便簡化為一個兩輪摩托車的模型,有兩個有側向彈性的輪胎支撐與地面具有側向及橫擺運動的二自由度汽車模型[2],如圖2所示。
由牛頓矢量力學和牛頓第二定律,可以建立微分方程如下:
(1)
(2)
(3)
當后輪轉角δr=0,且前輪轉角δf≠0時,上述四輪轉向二自由度模型變成兩輪轉向二自由度模型,此時微分方程如下:
(4)
(5)
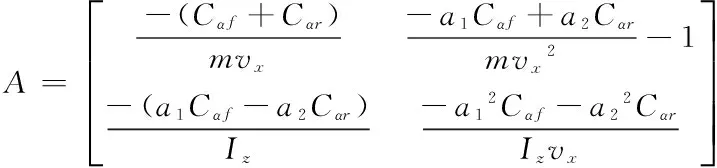
式中:m—汽車等效質量,kg;vx—汽車前進車速,m/s;
vy—汽車質心速度在y軸上的分量,m/s;

r—橫擺角速度,rad/s;β—車輛質心側偏角,rad;
Iz—轉動慣量,kg.m2;
Cαf、Cαr—前、后單個輪胎的側偏剛度(正值),N/rad;
δf、δr—前、后輪轉角,°;a1、a2—質心到前、后軸的距離,m;
L—軸距,m;
二、系統狀態方程
(6)
(7)
其中A為狀態矩陣,B為輸入矩陣,C為輸出矩陣,D為直接傳遞矩陣。
式中各個矩陣物理量為:

(8)
(9)
A1,B1,C1,D1代表的含義與4WS相同。
式中各個矩陣物理量為:
三、四輪轉向車輛的控制策略
汽車的操縱穩定性是指在駕駛者不感到過分緊張、疲勞的情況下,汽車能夠遵循駕駛者通過轉向系統及轉向車輪給定的方向行駛,且遇到外界干擾時,汽車能夠抵抗干擾而保持穩定行駛的能力,汽車的操縱穩定性是汽車主動安全性的重要評價指標之一。而表征汽車操縱穩定性的評價指標主要有:橫擺角速度、側向加速度、質心側偏角、側傾角及轉向力等物理量[3]。
目前,4WS汽車所采用的控制策略基本都是基于線性二自由度汽車模型,以質心側偏角為0作為控制目標,以提高側向穩定性,主要有兩種經典控制方法:前輪比例前饋和橫擺角速度比例反饋控制[4]。為了表明上述兩種控制方法的效果,根據上式(8)和(9)在Simulink中建立傳統的二輪轉向車輛的仿真模型,如下圖3所示,以前輪轉角δf作為二自由度FWS車輛動力學模型的輸入,以質心側偏角、橫擺角速度和側向加速度作為輸出,依據三個輸出量的響應來表征傳統FWS車輛的操縱穩定性。

圖3 傳統FWS車輛模型
(一)前輪比例前饋控制方法

(10)
在Simulink中建立四輪轉向前輪比例前饋控制的仿真模型,如下圖4所示,以前輪轉角δf和后輪轉角δr=kδf作為二自由度4WS車輛動力學模型的輸入,以質心側偏角、橫擺角速度和側向加速度作為輸出,依據三個輸出量的響應來表征前輪比例前饋控制的4WS車輛的操縱穩定性。

圖4 比例前饋控制的四輪轉向模型
(二)橫擺角速度比例反饋控制方法
(11)
根據上述控制方法,在Matalb/Simulink中建立四輪轉向橫擺角速度比例反饋控制的仿真模型,如下圖5所示,以前輪轉角δf和后輪轉角δr=krr作為二自由度4WS車輛動力學模型的輸入,以質心側偏角、橫擺角速度和側向加速度作為輸出,依據三個輸出量的響應來表征橫擺角速度比例反饋控制的4WS車輛的操縱穩定性[5]。

圖5 橫擺角速度比例反饋控制的四輪轉向模型
四、Simulink模型仿真與結果分析
汽車操縱穩定性可以通過角階躍輸入試驗、正弦輸入試驗、移線試驗、蛇形試驗等來評價,為了研究的方便性,本文只探討了角階躍輸入試驗[11],同時將使用上述兩種控制方法的4WS車輛模型與傳統的FWS模型進行了對比分析,車輛動力學模型的仿真參數如下表1所示。
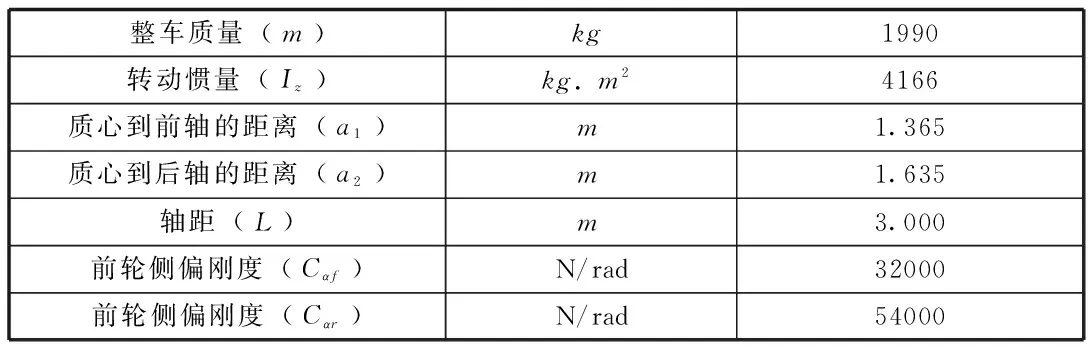
表1 車輛動力學模型的仿真參數
在上述角階躍試驗中,前輪轉角的階躍信號幅值為20°,在0.5s時開始起躍,用vx=10km/h模擬汽車的低速行駛工況,用vx=80km/h模擬汽車的高速行駛工況,對傳統的二輪轉向車輛模型、比例前饋控制和橫擺角速度比例反饋控制的四輪轉向車輛模型進行仿真,得到了低速工況和高速工況下車輛操縱穩定性三個評價指標的相應曲線,其中低速與高速質心側偏角曲線如圖6所示,低速與高速橫擺角速度曲線如圖7所示,低速與高速側向加速度曲線如圖8所示。
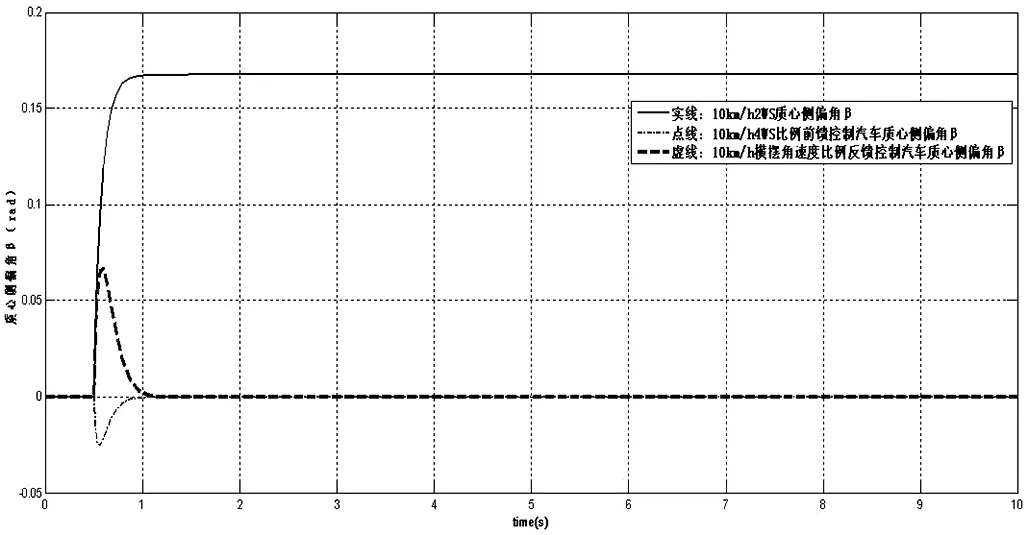

圖6 10km/h與80km/h質心側偏角的階躍響應
由圖6可見,無論低速還是高速,前輪轉角比例前饋和橫擺角速度比例反饋控制的4WS車輛的質心側偏角經過小幅度的波動后都可以迅速達到質心側偏角為零的穩態,滿足控制目標要求,其穩態值明顯小于傳統FWS車輛的質心側偏角,因此這兩種控制方法提升了汽車的循跡能力和行駛穩定性。車速相同時,前輪轉角比例前饋控制方法的質心側偏角波動幅值小于橫擺角速度比例反饋控制的波動幅值。
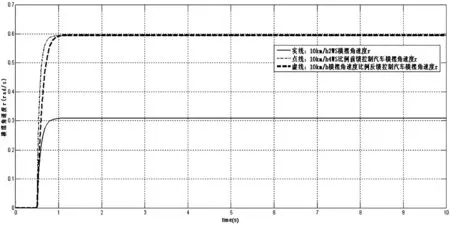
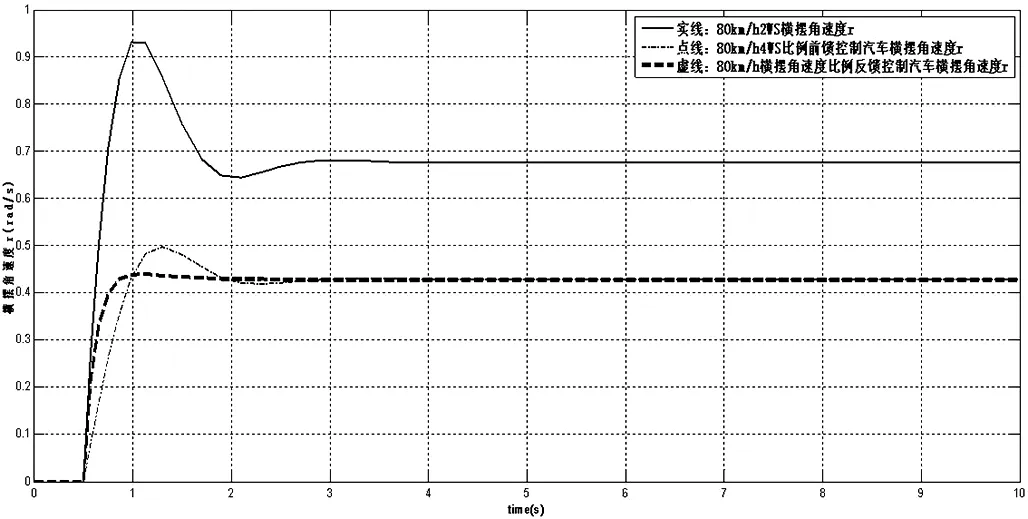
圖7 10km/h與80km/h橫擺角速度的階躍響應


圖8 10km/h與80km/h側向加速度的階躍響應

從圖8可見,側向加速階躍響應曲線與橫擺角速度階躍響應曲線的變化趨勢基本相同,在低速工況時,采用前輪轉角比例前饋控制和橫擺角速度比例反饋控制的4WS車輛的側向加速度大于傳統FWS車輛的側向加速度,而在高速工況時,4WS車輛的側向加速度小于FWS車輛的側向加速度,由計算公式R =vx2/ay得,車速相同時,隨著側向加速度增大,轉彎半徑R減小,反之增大。這在一定程度上保證了車輛低速轉向時的機動性和操縱輕便性,也改善了高速轉向時的操縱穩定性,但是也會使高速轉向時產生過多的不足轉向,不利于操穩性的提升,同時,采用這兩種方法的4WS車輛的側向加速度經過小幅度的波動后,最終達到相同的穩態值,與橫擺角速度不同的是,隨著車速的減小,波動越劇烈。
五、結論
首先利用系統動力學方法得到了4WS車輛與傳統FWS車輛的微分方程,并以前輪轉角為輸入,操穩性的三個評價指標為輸出,將微分方程轉化成狀態方程;其次,以質心側偏角為零作為控制目標,在Matlab/Simulink環境中分別建立前輪轉角比例前饋控制模型、橫擺角速度比例反饋控制模型和傳統FWS車輛模型,實現三個模型在高速和低速工況下的角階躍輸入仿真。通過仿真對比分析可以看出,采用上述兩種經典控制方法的4WS車輛相比于傳統FWS車輛,在一定程度上改善了低速轉向時的輕便性和高速轉向時的操縱穩定性,是4WS車輛主動控制方向的兩種較為經典且實用的方法,但同時也存在一定的不足,高速工況下,橫擺角速度和側向加速度穩態值減小量過大,容易造成過多的不足轉向,不僅增加了駕駛員的負擔,而且不利于車輛的緊急轉向或換道行駛。可以使用更加復雜的現代控制方法(如神經網絡控制、模糊控制等)來彌補上述兩種控制方法的不足。
[1]邊明遠.汽車四輪轉向(4WS)技術及其發展前景[J].世界汽車.1999(12)
[2]余志生.汽車理論(第四版)[M]:機械工業出版社,2006.
[3]喻凡,林逸.汽車系統動力學[M]:機械工業出版社,2005.
[4]馮櫻,鄧召文,高偉.基于聯合仿真的四輪轉向汽車控制策略研究[J].重慶交通大學學報:自然科學版,2010,29(6):998-1001.
[5]施國標,于蕾艷,林逸.四輪線控轉向橫擺角速度反饋控制策略研究[J].系統仿真學報,2008(02):506-508.
[6]屈求真,劉延柱.四輪轉向汽車的控制策略[J].汽車技術.1999(02)
[7]郭孔輝,軋浩.車輛四輪轉向系統的控制方法[J].吉林工業大學學報.1998(04).
[8]羊玢,陳寧,田杰,馬梁,張晨強.基于比例控制的4WS汽車操縱穩定性仿真研究[J].北京理工大學學報.2013(08).
[9]Kawakami Hirosi Sato Hiroki Et Al.Development of integrated system between active control suspension,active 4WS,TRC and ABS[J].SAE,1992
[10]杜峰.基于線控技術的四輪主動轉向汽車控制策略仿真研究[D]:長安大學,2009.
[11]周 佳.四輪轉向系統控制策略對比研究[D].北京理工學,2015.
[12]張喬.線控轉向系統控制策略研究[D]:武漢科技大學,2012.
湖北汽車工業學院中青年人才項目(Q20171803)。
姚廣磊(1989-),男,河南周口人,碩士生,從事商用車多橋轉向的研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
核科學與工程(2015年4期)2015-09-26 11:59:03
決策探索(2014年21期)2014-11-25 12:29:50
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00
