基于小型多旋翼無人飛行器的新型消防救援作戰體系研究
2017-09-08 06:06:50江霖紓
中國人民警察大學學報 2017年8期
江霖紓
(龍巖市消防支隊,福建 龍巖 364000)
基于小型多旋翼無人飛行器的新型消防救援作戰體系研究
江霖紓
(龍巖市消防支隊,福建 龍巖 364000)
從小型多旋翼無人飛行器進入消防部隊裝備序列的服役現狀出發,對其在滅火和搶險救援工作中的裝備建設思路進行了闡述,并提出了一種新型消防救援作戰體系,加強人員、車輛和模塊化多旋翼的聯用,以期能為實戰提供幫助。
小型多旋翼無人飛行器;消防救援;作戰體系
隨著經濟社會的發展和公安消防部隊業務職能的拓展,消防官兵在滅火和搶險救援行動中面臨巨大的風險與挑戰。如何讓信息獲取準確高效,決策部署迅速到位,施救手段簡潔有力,成為消防部隊亟待解決的難題。近年來,多旋翼飛行器憑借其靈活多樣的飛行方式在媒體錄制、災情調查、農業植保和電力巡檢等領域得到了較大的應用[1]。所以,研究小型多旋翼無人飛行器在消防滅火和搶險救援工作中的實戰應用,嘗試構建新型消防救援作戰體系,對提升部隊戰斗力建設水平,具有現實意義。
1 小型多旋翼無人飛行器執勤現狀
2009年前后,由于飛行控制系統設計取得突破性進展,小型多旋翼無人飛行器迅速由設想過渡為航模,并最終演變成可靠的工業級產品,應用于軍警等特種行業。迄今為止,公安部消防局、各省級公安消防部門陸續組織了多試點、多課題的操作試驗,并多次介入實戰,相關信息屢見報端,成果斐然。2015年以來,消防部隊陸續招標采購小型多旋翼無人飛行器,小規模裝備一線基層中隊,實現了從研發定型到投入執勤戰備這一重大突破。
但縱觀軍用、警用裝備研究發展史,諸如多旋翼飛行器這類取得大突破、快發展的高技術裝備,其技術復雜,資金密集,極其依賴綜合科學技術基礎。可預期的是:小型多旋翼無人飛行器將在實戰中暴露出可靠性低,人機優化差,實戰戰法欠缺等問題,戰斗力建設在相當長時間內處于人與裝備的“磨合期”。這一階段更應加速裝備化改造進程,在應用中研發,在實戰中改進,通過持續性、積累性的迭代創新,實現更可靠、更全面、更專業的既定目標。具體操作上,裝備化所涉及的多學科交叉融合、人機交互優化,并非普通產商所能獨立解決的問題。目前看來,飛行器的平臺化建設與機載設備的模塊化設計是有效整合行業資源的較為理想的解決方案。
2 裝備建設的“平臺化”與“模塊化”思路
多旋翼飛行器是由飛行平臺、機載設備和軟件系統組成的有機整體。按照裝備建設的“平臺化”與“模塊化”思路,應著力解決三個問題:飛行性能、拓展能力與模塊化設計。
2.1 合理的飛行性能
飛行平臺主要包括飛行控制系統和飛行動力系統,更多情況下還可能包括導航系統、數據鏈傳輸系統等,主導著機體尺寸、飛行距離、最大荷載、飛行時間、機動性能等參數。這些功能性指標反映了平臺的飛行性能,是進行裝備化改造的基礎。立足實戰需要,消防部隊應建立階梯化配置思路,完善中隊級、大隊級、支隊級和總隊級配備標準,按照電機選型、懸臂設計、電池選型、機體和旋翼尺寸設計、操作指令控制設計及陀螺儀反饋控制設計的程序[2],構建出針對性強、性能適宜的飛行平臺。需要說明的是,上述論斷并不意味著飛行平臺的研發難度低,相反,在飛控系統的調試、控制算法的改進上,難度是客觀存在的。
2.2 優秀的拓展能力
拓展能力分為硬件、軟件兩方面。硬件上,消防用無人航空載具平臺宜采用統一的連接器接口。該接口能同時滿足提供電能、具有光學信號路徑和磁性穩固連接的功能。軟件上,開放部分接口權限,開源應用系統,形成無人飛行器生態系統,利用小型多旋翼無人飛行器做好一個平臺,搭載不同的機載設備就可以用于不同的用途,真正讓更多裝備產商可以在平臺上聯動起來。
2.3 可靠的模塊化設計
機載設備提供了在平臺飛行性能允許范圍內的裝備化改造方向,是小型多旋翼無人飛行器在消防部隊實戰應用的集中體現。通過模塊化設計,整合行業資源,構造即插即用的機載設備模塊,與飛行平臺協同作用,完成實戰任務。按照具體功能,筆者將其分為航拍模塊、救援模塊、滅火模塊、通信模塊、照明模塊和偵檢模塊。
3 新型消防救援作戰體系的構建
3.1 創新實戰理論
按照以上思路,從現有人員和裝備體系出發,筆者設計了一套基于小型多旋翼無人飛行器與消防車輛、指揮員、戰斗班聯用的消防救援作戰體系。作戰車輛采用前三、后四座位布局,前排從左至右依次為消防車駕駛員、多旋翼操作手、大中隊指揮員,后排為四個戰斗員,右一為戰斗班班長,顯示屏安裝在駕駛室正前方,飛行器通過升降機構,安裝在后排正上方,如圖1所示。
升降機構分為外殼、升降平臺和控制系統三部分,由電機驅動,可根據需要進行飛行器的釋放、起飛與降落和回收作業[3]。
3.2 實戰應用探究
筆者通過兩個設想的案例,來說明這套聯用體系的運行模式。案例一:某日,中隊接到報警稱轄區一工廠發生火災,消防官兵隨即出動,不料距工廠不遠處的道路因突發車禍堵塞。無人機駕駛員操作配備航拍模塊的無人機迅速起飛,進行火場偵查作業。指揮員根據繞行途中獲得的火場面積、平面圖、重點部位等信息制定初戰部署。5 min后,中隊到場,迅速展開,火勢被及時控制。案例二:某日,一棟高樓突然失火,濃煙滾滾,到場中隊內攻后有一人被困于五樓窗口,裝備遺失,無法逃出,四周并無登高車作業面。這時,無人機更換救援模塊起飛,將一根救援繩的引導繩拉起,送至樓層窗口附近。被困戰士順利取下引導繩,將救援繩拉到窗口,完成支點制作,利用速降技術滑至地面成功獲救。上述案例體現了多旋翼飛行器搭配不同功能模塊的基礎實戰應用。這套體系下,多旋翼飛行器還可以搭配下列模塊。
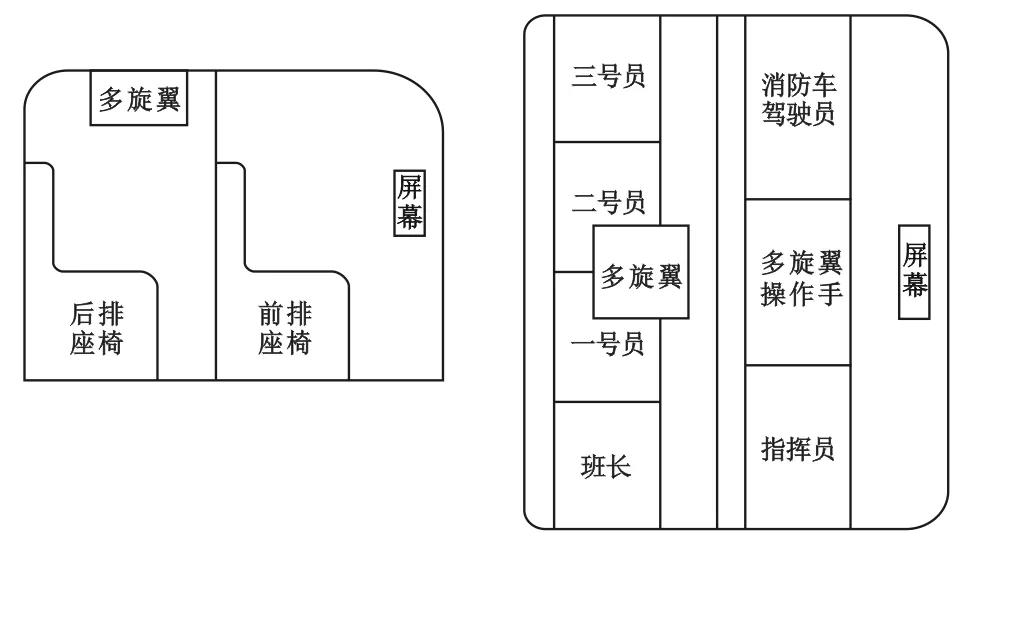
圖1 聯用體系的側視、俯視圖
3.2.1 航拍模塊
航拍模塊在工業級多旋翼飛行器中已廣泛應用,技術較為成熟,可大致分為云臺、攝像頭、視頻傳輸系統以及視頻接收系統等部件。當現場需要時,使用多旋翼飛行器進行災情偵查,一是可以跨越復雜地形地貌,優化偵查路線,減少人員行程,提高效率;二是能夠避免人員長時間暴露在危險環境,降低傷亡風險。較現有偵查手段而言,多旋翼飛行器可以看得更快、更高、更遠,為消防部隊執行任務中的指揮決策、安全監控、緊急避險和戰勤保障提供關鍵信息,同時航拍數據還能用于宣傳報道和戰評分析。就日常工作而言,現如今,執勤中隊的轄區廣,城市的建設速度快,執勤中隊在日常的六熟悉中可以通過多旋翼飛行器結合轄區電子地圖,全面了解轄區消防通道、建筑高度等信息,制作出空中俯拍的轄區平面圖,輔助進行重點單位預案制作。
3.2.2 救援模塊
救援模塊主要針對水域、山岳、深井、坑道和高空等處置難度較大的搶險救援警情。實戰中,利用飛行器攜帶集成或搭載救援物資(食品、藥品)、搶險裝備(救助繩)和通信器材(對講機)的救援模塊來輔助完成救援。在水域和山岳救援中,小型多旋翼無人飛行器可以克服拋投器在使用環境(樹林、谷地)、范圍(距離過遠)、地形(無著陸點)以及精度差的局限性,完成救助繩的運輸。在深井、坑道和高空救援中,亦可實現對氧氣袋、緩降器等器材的運輸。
3.2.3 滅火模塊
滅火模塊主要用于攜帶高效滅火劑進行噴射滅火作業。受限于飛行器的尺寸,小型多旋翼無人飛行器無法攜帶過重、過多的滅火劑,這就要求滅火劑必須高效,以及僅適用于諸如高壓線路、變壓器等特殊火災。
3.2.4 通信模塊
通信模塊還可細分為通信中繼和影音通話兩大功能。空中通信中繼是多旋翼無人飛行器的一個重要用途。在大型搶險救援現場,無線通信系統很可能遭到一定程度的破壞。而多旋翼無人飛行器則可以作為便捷的通信中繼機,在指揮中心與現場之間快速構成一個應急局域無線通信網,為救援贏得寶貴時間。影音通話功能是基于航拍模塊進行的有效影視語音通信聯絡。它便于消防員獲取準確的火場信息和被困人員的需求,同時對建筑內被困人員發出逃生疏散和自救他救語音指導提示,遠程協助被困人員逃生。若無法抵近目標,還應集成空中喊話器,通過高分貝喇叭進行定向喊話。
3.2.5 照明模塊
照明模塊可以由強光照明系統和照明彈、信號彈發射系統構成。強光照明系統運用于對事故救援現場進行高空照明,同時輔助航拍模塊在黑夜或弱光條件下維持正常工作。另一方面,照明光柱可以進行指示定位作業,通過合適的濾鏡和機械設計,光柱的變換也能起到燈語的作用。照明彈、信號彈發射系統的作用類似,值得強調的是即便由于彈藥的可燃性,使用條件受限,撤退信號彈搭配空中喊話功能仍是十分優秀的撤退信號。
3.2.6 偵檢模塊
偵檢模塊通過對高精尖偵檢儀器的微小化處理能夠完成數據采集、實時處理和無線傳輸。選擇性集成諸如可燃氣體探測儀、有毒氣體探測儀、激光測距儀和便攜式危險化學品檢測片等設備的多旋翼無人偵檢平臺,可以在防爆處理后,執行易燃易爆、有毒有害、缺氧濃煙等事故災害現場的遠程偵檢任務。
4 結論
本文試分析了小型多旋翼無人飛行器列裝后的升級改造和實戰應用思路,提出了一種新型消防救援作戰體系。需要說明的是,本研究立足于目前較為可行的小型多旋翼無人飛行器平臺的設計方案和體系。就消防用無人航空載具平臺而言,三類飛行器的服役前景和使用比例應是變化的。在科技進步的前提下,固定翼飛行器和直升機的微型、小型化開發及成本控制和投入使用是可預期的,顯然它們的負載更大,速度更快,應用范圍更廣。
[1] 中國民用航空局飛行標準司.輕小無人機運行規定(試行): AC-91-FS-2015-31[S].
[2] 王偉,馬浩,徐金琦,等.多旋翼無人機標準化機體設計方法研究[J].機械設計與制造,2014(5):147-150.
[3] 張文博,王惠林,呂勃龍,等.無人機載光電任務設備升降機構的控制器設計[J].電子設計工程,2015,23(14): 152-154.
(責任編輯 陳 華)
New Firefighting Combat System Based on Multi-rotor Mini-UAV
JIANG Linshu
(Longyan Municipal Fire Brigade, Fujian Province 364000, China)
This paper elaborates the construction of firefighting and rescue equipments after multi-rotor mini-UAV being deployed in the fire department, and puts forward a new combat system with the integration of personnel, vehicles and multi-rotor UAV, aiming at providing an inspiration for actual combats.
multi-rotor mini-UAV; fire rescue; combat system
2016-12-26
江霖紓(1992— ),男,福建福州人。
D631.6
A
1008-2077(2017)08-0030-03