四足仿生機器人腿部結(jié)構(gòu)設(shè)計與分析
2017-09-16 07:49:06劉瑞軒方建軍李敏劉德馨
科學(xué)中國人 2017年20期
劉瑞軒,方建軍,李敏,劉德馨
1北方工業(yè)大學(xué)機械與材料工程學(xué)院;2北京聯(lián)合大學(xué)自動化學(xué)院
四足仿生機器人腿部結(jié)構(gòu)設(shè)計與分析
劉瑞軒1,方建軍2,李敏1,劉德馨2
1北方工業(yè)大學(xué)機械與材料工程學(xué)院;2北京聯(lián)合大學(xué)自動化學(xué)院
依據(jù)仿生學(xué)原理和機械結(jié)構(gòu)設(shè)計原理,設(shè)計了一款全膝式多自由度的仿生四足機構(gòu)。運用pro/E軟件對虛擬樣機做了詳細的結(jié)構(gòu)設(shè)計,包括整體支架,腿部結(jié)構(gòu)。基于ABAQUS完成了機器人關(guān)鍵零部件的仿真分析,得了腿部關(guān)鍵部件的受力變形情況,為后續(xù)的機器人整體結(jié)構(gòu)優(yōu)化奠定了基礎(chǔ)。
四足機器人;仿生設(shè)計;仿真分析;結(jié)構(gòu)設(shè)計
引言
隨著科學(xué)技術(shù)的不斷挺高,我們對于未知事物的探索從未間斷過,如月球的深度探索,深海資源的探索等等。然而這些領(lǐng)域的地形是非常復(fù)雜的,我們想要從這些地方獲取新的發(fā)現(xiàn),避免不了要有機器的輔助,運動仿生機器人從移動方式上有足式移動、履帶移動、爬行、蠕動及撲翼飛行等形式,由于足式機器人的綜合性能最優(yōu)越,故其一直是此類機器人研究的重點。足式機器人在移動能力上具有靈動性、可變性的特點,故其可適應(yīng)如深海和南北極等地區(qū)的科學(xué)探索工作,從當今社會的發(fā)展來看,人們所需的應(yīng)用工具越來越多,單純的代步工具汽車不久的將來也不能完全幫助到人們的方方面面,在四足機器人研究的狂熱浪潮中,如何找到一款適合人類生活輔助的機器人并能承擔(dān)相應(yīng)的野外研究及探索工作,也是一個有趣的綜合研究方向,綜上所述足式機器人的研究正受到各領(lǐng)域研究者們的青睞[1]。
1 四足機器人的結(jié)構(gòu)分析
在研究四足動物時必須對其骨骼構(gòu)造進行分解研究。生物經(jīng)過進化已經(jīng)適合生存,所以在設(shè)計初的研究階段往往可以借助動物的體型及行為做為四足機械結(jié)構(gòu)設(shè)計的依據(jù),圖1為四足動物的體型圖,四足生物的腿部一幫包括髖、膝和踝三個關(guān)節(jié)。在行走過程中髖關(guān)節(jié)實現(xiàn)前后的擺動和側(cè)擺調(diào)整方向,膝關(guān)節(jié)可簡化為一個自由度的前后擺動,踝關(guān)節(jié)我們可以簡化為彈性單元用以減少沖擊力對機體的損傷,腿部的這些自由度實現(xiàn)了四足動物的行走,使其可以行走、奔跑在復(fù)雜的地面上。

圖1 四足動物體型結(jié)構(gòu)Fig.1 Anatomic diagram of quadruped mammals
本文設(shè)計的四足機器人不要求具有像獵豹一樣很快的奔跑速度,可以對仿生結(jié)構(gòu)進行簡化,仿生機構(gòu)拓撲出來的四足機械結(jié)構(gòu)如圖2所示,簡化的結(jié)構(gòu)如圖3所示。很多研究數(shù)據(jù)已表明腿的結(jié)構(gòu)和布局方式對四足機器人的運動沒有影響[2]。此外,從簡化四足機器人結(jié)構(gòu)、降低控制復(fù)雜度和跌倒后的自行起立能力等角度考慮,圖3的結(jié)構(gòu)也更加穩(wěn)定在靈活性上與圖2近似。綜合考慮,四足機器人擬采用圖3所示的結(jié)構(gòu)形式。
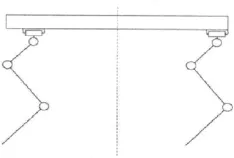
圖2 四自由度腿部結(jié)構(gòu)配置Fig.2 4-DOF leg configuration
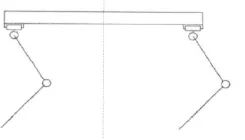
圖3 三自由度腿部結(jié)構(gòu)配置Fig.3 3-DOF leg configuration
2 四足機器人腿部結(jié)構(gòu)設(shè)計
四足機器人的機身設(shè)計需要為后期驅(qū)動器的、控制器、蓄電池的安裝,還有負載裝物留下空間。因此本文采用桿件和板件固定連接,保證空間的足夠大,而且減少了整體的質(zhì)量。結(jié)構(gòu)如圖4所示,用6根連桿固定三個鈑金件,在鈑金件上要預(yù)留出髖關(guān)節(jié)驅(qū)動單元的位置,為后續(xù)設(shè)計奠定基礎(chǔ)。
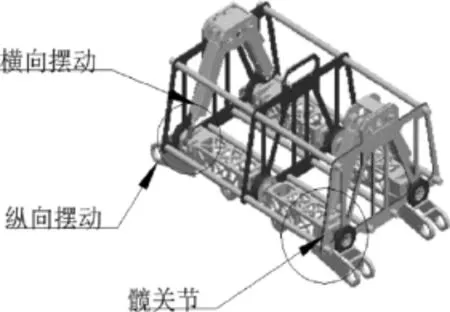
圖4 機架及髖關(guān)節(jié)三維模型Fig.4 Rack and hip three-dimensional model
髖關(guān)節(jié)的機構(gòu),有兩個自由度,可看作沿髖關(guān)節(jié)軸的軸向擺動和徑向擺動,由于可實現(xiàn)兩個方向的運動,這樣的機構(gòu)可以使腿部靈活的移動,運動空間大。目前國內(nèi)的四足機器人省略了此處的橫向擺動,可以使機體結(jié)構(gòu)更加穩(wěn)定,負載大,但是不能實現(xiàn)靈活的轉(zhuǎn)彎,側(cè)走。[3-4]本文改進了這一缺陷,但是此處的轉(zhuǎn)矩較大,所以從機構(gòu)上改進同時在驅(qū)動單元的選擇上也不同于腿部的驅(qū)動單元,要能夠承受更大的負載力矩。
四足機器人的膝關(guān)節(jié)是髖關(guān)節(jié)之下的另一個縱向擺動關(guān)節(jié),主要是旋轉(zhuǎn)運動微調(diào)腿部的姿態(tài)如圖5,在機器人側(cè)擺(橫向行走)腿部是有角度的所以關(guān)節(jié)處及要有徑向力也會同時受到軸向力,故在關(guān)節(jié)處的軸系結(jié)構(gòu)設(shè)計,兩邊采用對頂軸承,可同時承受徑向和軸向力,本設(shè)計的軸系采用密封結(jié)構(gòu)可以保證軸承的使用壽命,同時減少了不必要的誤差。[5]

圖5 膝關(guān)節(jié)的三維設(shè)計模型Fig.5Three-dimensional design model of knee joint
3 單腿關(guān)鍵部件的有限元分析
大腿由于連接小腿和機器人身體支架,是一級受力關(guān)節(jié)零部件,大腿的設(shè)計質(zhì)量對機器人性能影響很大。大腿選材為6061鋁合金,采用中空的版式結(jié)構(gòu),內(nèi)部裝有驅(qū)動單元,大腿主要承擔(dān)的運動是側(cè)擺,另外就是與小腿鏈接不穩(wěn)定的縱向擺動。所以只要知道這兩種情況下大腿部件的受力即可分析。在這兩種情況下受力方向既有徑向也有軸向的。故給大腿施加三個力,關(guān)節(jié)連接處施加軸承載荷,在小孔處因為要連接推桿,所以施加集中載荷。[6]經(jīng)過ABAQUS軟件計算,得到變形云圖及最大變形量數(shù)據(jù)(此時的受力分析是經(jīng)過質(zhì)量優(yōu)化后的云圖)數(shù)據(jù)顯示大腿結(jié)構(gòu)在受力作用下變形量小于0.001mm,故滿足設(shè)計要求,變形云圖如圖6所示。
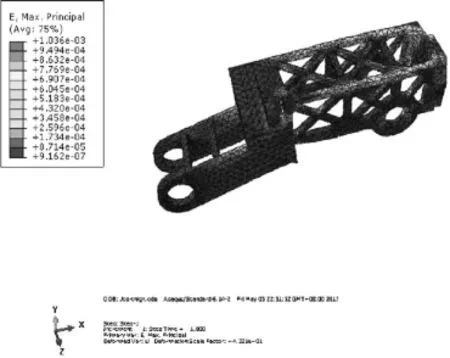
圖6 大腿受力變形圖Fig.6 Thigh force deformation map
作為機器人腿部結(jié)構(gòu)的重要組成部分,小腿連接著大腿即足部關(guān)節(jié),同時受到電動推缸推桿的推力,所以受力分析是對大腿板施加4個力包括兩端連接部位處施加軸承載荷,小孔處添加的兩個集中載荷。仿真計算后顯示小腿結(jié)構(gòu)在受力作用下變形量小于0.00013mm,故滿足設(shè)計要求。變形圖如圖7所示。
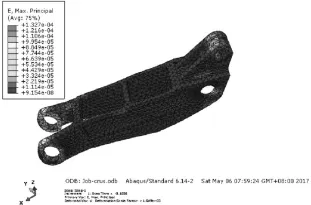
圖7 小腿受力變形圖Fig.7 Calf force deformation map
4 結(jié)論
本文借鑒動物仿生學(xué)研究成果,對四足機器人的結(jié)構(gòu)進行了詳細結(jié)構(gòu)設(shè)計,通過Hypermesh對機器人關(guān)節(jié)零部件結(jié)構(gòu)設(shè)計進行細致的網(wǎng)格劃分工作,通過ABAQUS對零件進行了有限元分析。得到了結(jié)構(gòu)受力情況和變形量,為進一步提高機器人的負載-自重比奠定了基礎(chǔ)。
[1]于浩.液壓四足機器人的結(jié)構(gòu)設(shè)計與分析[D].南京航空航天大學(xué),2012.
[2]羅慶生,韓寶玲.現(xiàn)代仿生機器人設(shè)計[D].北京:電子工業(yè)出版社,2008.
[3]Raibert M H,Chepponis M,Brown Jr H B.Running on four?legs as though they were one[J].IEEE Journal of Robotics andAutoma?tion,1986,2(2):70~82
[4]Fukuoka Y,Kimura H,Hada Y,et al.Adaptive dynamic walk?ing of a quadruped robot‘Tekken’onirregular terrain using a neural system model[C]//IEEE International Conference on Robotics and Au?tomation,14-19 September 2003,Taipei,Taiwan,China.Piscataway,NJ,USA:IEEE,2003:2037~2042.
[5]王鵬,徐曉希,李吉祥,等.小型化四足機器人的運動學(xué)分析及仿真研究[J].機電工程,2013,30(8):901-904.
[6]陳己明,彭響方,賴鵬.基于Midplane網(wǎng)格單元HyPermesh與Moldflow的網(wǎng)格前處理[J].塑料科技,2007,35(3).
北京市屬高等學(xué)校高層次人才引進與培養(yǎng)計劃項目資助(CIT&TCD20150314)。
劉瑞軒(1989-),男,漢族,北京人,學(xué)歷:碩士研究生,主要從事機器人機構(gòu)設(shè)計與仿真研究,研究方向:智能機器人;
方建軍(1970-),男,湖北羅田人,博士,北京聯(lián)合大學(xué)自動化學(xué)院,教授,主要從事智能機器人研究。
方建軍。
猜你喜歡
建材發(fā)展導(dǎo)向(2023年6期)2023-03-31 02:51:38
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
建材發(fā)展導(dǎo)向(2021年13期)2021-07-28 07:15:50
中華詩詞(2020年1期)2020-09-21 09:24:52
中華詩詞(2019年7期)2019-11-25 01:43:04
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(2016年12期)2016-12-26 21:37:36
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
中國房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:23