基于多模融合的室內定位算法研究
2017-09-25 14:52:09趙穩穩羅智杰曹陽羅健坤周國富
現代電子技術 2017年18期
趙穩穩+羅智杰+曹陽+羅健坤+周國富
摘 要: 針對現有單模定位算法精度較低的問題,基于融合技術的思想,通過分析各種典型的室內定位技術及現有的融合定位系統,提出了一種WiFi與藍牙兩種技術進行融合的室內定位方案,旨在提高定位精度。提出的算法采用指紋法得到兩種模式的定位結果,并在決策級上利用權重分析的方法進行多模融合,最終得到目標的坐標定位。
關鍵詞: 藍牙技術; 多模融合; 信息融合; 室內定位
中圖分類號: TN915?34 文獻標識碼: A 文章編號: 1004?373X(2017)18?0007?04
Research of indoor location algorithm based on multimode fusion
ZHAO Wenwen1, LUO Zhijie1, CAO Yang1, LUO Jiankun1, ZHOU Guofu1,2
(1. South China Academy of Advanced Optoelectronics, South China Normal University, Guangzhou 510006, China;
2. Academy of Shenzhen Guohua Optoelectronics, Shenzhen 518110, China)
Abstract: Considering the low accuracy of the current single?mode location algorithm, various typical indoor location technologies and the existing fusion location system are analyzed, and based on the idea of fusion technology, an indoor location scheme fusing the WiFi technology and the bluetooth technology is proposed to improve the location accuracy. The fingerprint method is adopted in the proposed algorithm to obtain the location results of the two modes. The multimode fusion is performed with the weight analysis method at the decision?making level, and the coordinate position of the target is obtained finally.
Keywords: bluetooth technology; multimode fusion; information fusion; indoor location
隨著現代化產業的蓬勃發展,人們對基于位置服務的要求也日益增多,定位應用也隨著信息化時代的發展越來越普及,因此大量的室內定位技術應運而生。盡管有大量的研究,定位的問題仍面臨著很大的挑戰。
現階段的室內定位系統是利用室內相關無線信號,結合室內定位方法實現室內定位的技術。近10年間,隨著需求的增加,國內外高校和企業都對室內定位算法和模型進行了大量的研究與探討。目前已經有大量的技術應用于室內定位并取得了一定的成效,如超寬帶[1]、射頻識別[2]、WiFi[3]、ZigBee[4]、藍牙[5?6]、信標定位等。但就目前而言,由于室內環境的復雜性和多變性,單純依靠某一種定位技術,其定位精度、時間和成本都有相當的局限性,往往無法滿足用戶的定位需求。為了彌補單一定位技術的缺陷,融合技術已經慢慢成為室內定位的一個研究熱點和方向。融合技術主要在于解決如何在互不干擾,且不增加設備成本的條件下進行技術互補,以便更好地發揮各自的技術優勢。
本文基于融合技術的思想,通過分析各種典型的室內定位技術以及現有的融合定位系統,表明WiFi與藍牙兩種模式具有良好的融合前景,并提出了一種將WiFi和藍牙兩種模式進行融合的室內定位方案,旨在提高定位精度。
1 算法的基本研究模型
本文的研究主要圍繞著WiFi與藍牙融合的室內定位算法及實現,分析了這兩種技術的技術特點與優勢范圍。通過對現有室內定位算法的研究,本文將位置指紋算法作為基本算法,進一步提出了優化的算法改進方案,并通過軟件設計與實地測量,驗證了改進后融合定位算法的精確性。
1.1 算法模型研究分析
本文將基于信號強度(RSS)的指紋數據庫方法作為基本算法。位置指紋技術的原理是無線電信號在傳播過程中容易受到干擾,進而產生反射、折射等現象,由此形成了多路徑信號,而這些信號與周圍環境的關聯性很強[7]。在每一個觀測位置,接收的多徑信號與人的指紋特征類似且具有惟一性,故此可看作是某個位置上的“指紋”。位置指紋技術正是利用這些“指紋”特征,對未知的信息做出預測。由于“指紋”的概念比較抽象,在位置指紋定位技術中,一般用量化的RSS表示。
位置指紋法主要分為兩個階段,離線階段主要用于建立離線數據庫,而在線階段主要利用算法匹配離線數據庫的坐標數據,從而確定目標的位置。因此對于位置指紋法來說,需要合理的部署少量位置固定且已知的AP熱點。這些AP點會在離線階段建立一個指紋地圖。首先等間隔地在相應區域布置若干參考點,然后在每個參考點上進行定位信息的采集,采集的信息主要有RSS、基站編號、該參考點的位置坐標。假設一個定位空間內有AP熱點N,參考點的的數量為M,則對于第i個參考點的數據記錄可以表示為:endprint
[Si=A1:RSS1,A2:RSS2,…,AN:RSSN]
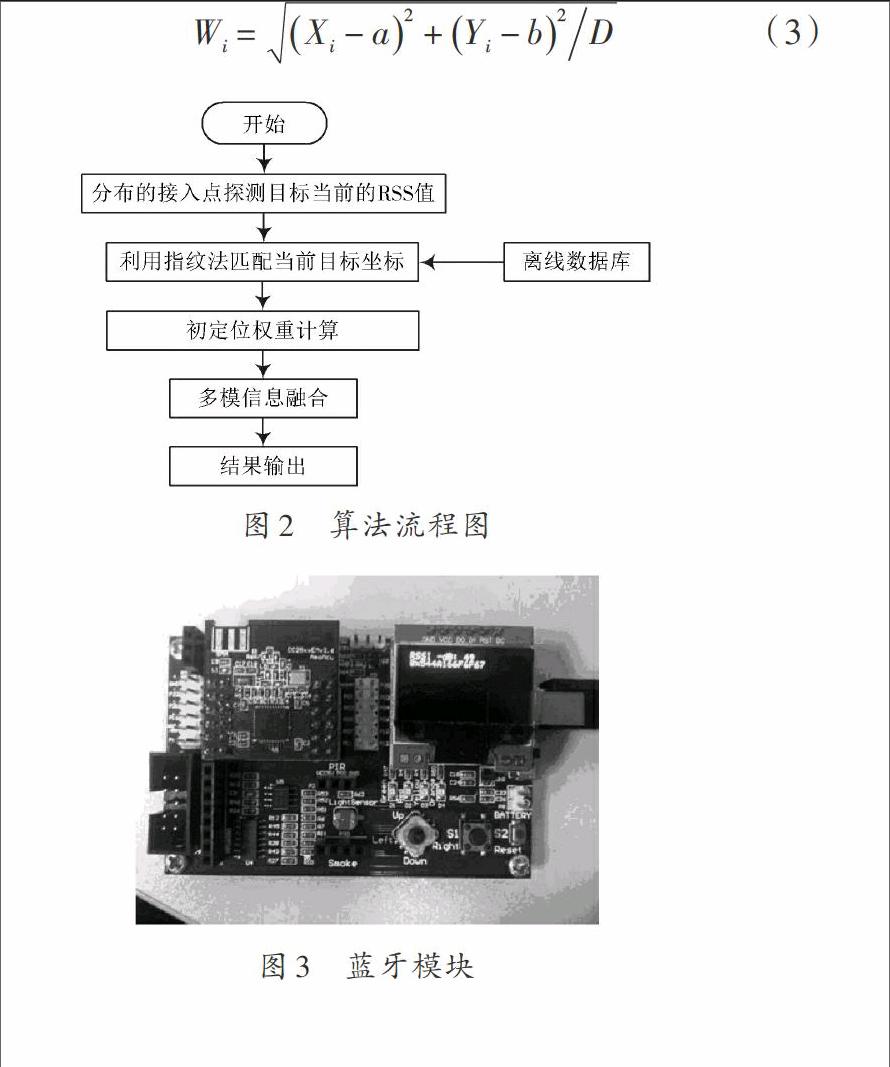
在線匹配階段,利用信號接收器進行信息采集,將在待定位點實時采集的RSS信息與指紋地圖中的RSS矢量進行匹配,找到與實時RSS最相似的一個或多個RP,依據這些己有的RP位置坐標估算出觀測點的位置坐標。圖1是該算法的實現流程結構圖。
但在實際的在線定位過程中,會存在各類的干擾和阻礙物,如環境噪聲等,AP點的信號總會受到干擾,從而產生偏差。為了消除這種偏差,提高定位的精度,本文提出多模的權重決策定位改善方案。圖2是改善后算法的整體框圖。該算法基本的原理:當不止一種定位技術被使用時,在各自的匹配算法后添加一個權重決策;對每個模型的位置指紋算法結果進行加權求和;假設第i類技術模式的位置指紋定位結果為li = (xi,yi),那么可根據式(1)、式(2)得到多模信息融合的修正定位結果。
[X=i=1Nwixi] (1)
[Y=i=1Nwiyi] (2)
式中,N為多模技術AP的總數,是第i類模式技術的定位結果的決策權值。決策權值的算法有好幾種,本文通過實驗分析藍牙和WiFi信號的通信模型,分別對該模型的權值進行決策計算。在本文中,采用用戶在當前位置接收到的信號最強的AP點的RSSI作為權重計算的依據,如下所示:
[Wi=Xi-a2+Yi-b2D] (3)
1.2 藍牙通信模型
選擇與當前室內環境匹配的路徑損耗模型對基于 RSSI 的室內無線信號定位結果至關重要,所以首先建立并且驗證一個可行的藍牙通信模型。根據室內定位的可視情況,在本算法中采用對數距離路徑損耗模型。它通過使用與環境相關的路徑損耗指數來改變自由空間路徑損耗模型改進得來的[8]。基本表達公式如下:
[PL(d)=PL(d0)+10×n×logdd0] (4)
本次實驗使用的藍牙接收和發送模塊是CC2540。CC2540包含一個出色的工業標準的8051內核的RF收發器、系統編程閃存記憶、8 KB RAM和其他功能強大的配套特征以及外設。它與TI的藍牙功耗協議棧相連接,可以形成市場上既靈活又高性價比的單模式藍牙低耗能解決方案,如圖3所示。
發射器和接收器被放置在5×5的空間里,各部分之間分為十等份,距離為0.5 m的一個室內工作模式,并且期待在環境中找到不止一個發射機,并且也是在5 m的空間,以0.5 m的距離等分,這樣比一個站立的人要平均占用較小的模型,并且擬合良好。圖4是實驗得到的藍牙對數模型。
圖4(a)是無障礙物下的藍牙對數模型,圖4(b)是在收發測試點上放置了0.5 m的小紙片的藍牙對數模型。為了保證模型的準確度,每一點的測試數據量為50個,對采集到的50個數據求平均。從圖4的實驗數據可以看出,藍牙定位距離在0.5~3 m時,藍牙信號強度是比較強的。同時RSSI量的差異都比較明顯,如1 m與2 m之間的RSSI差距接近10 dBm。而在3~5 m時,RSSI量的差異趨于平緩,相應的定位精度將會降低。從實驗結果和相關理論結合,提出一個改善的定位權重確定公式如下:
[Wi=Xi-a2+Yi-b2DK] (5)
[Wi=wii=nNwi] (6)
式中:(Xi,Yi)為通過指紋法實現初定位的定位坐標;(a, b)為當前位置接收到的RSSI最大的AP點位置。接收到的藍牙RSSI量,通過式(3)轉換成通信收發距離D。Wi是第i個目標的權重,經過歸一化處理后,滿足。在這里提出置信系數這一參數,K是一個根據收發點的距離變化的置信系數。當滿足D<3 m時,K=1.0。當3 m
這樣在利用式(1)和式(2)對每個模型的位置指紋算法結果進行加權求和時,會提高多模的定位精度。
2 實驗結果分析與討論
2.1 實驗環境與布局
為了證明本文提出的模型與算法的普適性,本文實驗場景設置在本學院一個比較空曠的實驗房間內。該實驗房間大小是6 m×6 m,房間內沒有明顯的大型阻礙物,保證了實驗環境的藍牙與WiFi信號的相對穩定性,房間布局圖如圖5所示。
由圖5可知,WiFi與藍牙的AP點各有4個。分別放置在房間內固定的位置。藍牙與WiFi兩個模式分別建立各自的指紋庫,每個指紋點相距5 cm,每個AP點對同一位置信號采集5次,以保證離線數據庫的穩定性。測試點有10個,均勻地分布在房間的各處,它們均為基于Android系統的智能手機。
2.2 實驗結果與分析
正如2.1節實驗所說,由于藍牙信號覆蓋的范圍非常有限,所以為了增強藍牙模式的信號穩定性,本實驗把CC2540的發射功率統一設置為0,即最大通信距離為10 m。
為了探討本文提出的算法的優越性,分別對WiFi單模與藍牙單模做了定位實驗。表1是本實驗的實驗結果。
從表1的數據可以看出,藍牙單模定位時,平均誤差是最大的,同時最大誤差達到55.6 cm。而WiFi單模的平均誤差和最大誤差都有所降低,在整體上,較藍牙單模的定位穩定和準確性有所提高。再看看最小誤差的比較,雖然WiFi單模定位的平均誤差要比藍牙低,但是在某些測試點定位時誤差還是比較低的,即在局部區域藍牙的精度要比WiFi要好。這跟上文討論的實驗現象是相吻合的,藍牙在短距離的定位結果是比較精準的,但是由于多徑相應等影響,它的精確度隨著距離變大而下降[9?10]。本文提出的多模權重融合方法平均誤差只有19.2 cm,同時最大誤差相比單模來說有很大的降低,這對于實際應用來說,具有非常大的實用意義。圖6是每個測試點在本文提出的多模權重算法下的誤差分布圖,從圖中實驗結果看,測試點(1,5,6)的誤差較大。結合房間分布圖來看,測試點(1,5,6)距離藍牙和WiFi的AP點的距離相對較遠,信號較弱,這跟討論的理論相吻合。而在距離藍牙AP點比較近的測試點(4,8,10),誤差比較低。可以看出藍牙在短距離的定位精度要比WiFi稍高。這是提出K置信因子的一個重要因素。
從實驗結果分析可知,AP點的位置與數量對定位的結果有明顯的影響,但是AP點并不是越多越好。這有三個原因:一是離線數據庫建立時間和次數將被極大的放大,不利于實際應用;二是增加在線匹配階段的計算復雜度;三是因為部分AP的信號浮動較大,且分布不均勻,甚至有大量聚集的可能,故其實際上對于定位精度的提高起反作用。所以AP點的分布與數量需要根據實際的定位環境做一個適當的調整。
3 結 論
針對現有單模點位技術存在的一些不足,本文提出一個基于多模融合的室內定位算法。在本算法里面,針對藍牙短距離定位精度高,覆蓋范圍較小,而WiFi信號定位較穩定的優點,引入了置信因子這一參數。從而改善了單模定位的局限性,也可以提高最終的定位精度。從實際的實驗結果來看,平均定位精度有15%以上的提高。因此,認為本文提出的算法有比較高的實用性和可靠性。
注:本文通訊作者為周國富。
參考文獻
[1] 肖竹,王勇超,田斌,等.超寬帶定位研究與應用:回顧和展望[J].電子學報,2011(1):133?141.
[2] 蔡型,張思全.短距離無線通信技術綜述[J].現代電子技術,2004,27(3):65?67.
[3] GU Y, LO A, NIEMEGEERS I. A survey of indoor positioning systems for wireless personal networks [J]. IEEE communications surveys & tutorials, 2009,11(1): 13?32.
[4] 孫朕.基于ZigBee技術的無線定位系統的研究與實現[D].焦作:河南理工大學,2011.
[5] ALTINI M, BRUNELLI D, FARELLA E, et al. Bluetooth indoor localization with multiple neural networks [J]. IEEE international symposium on wireless pervasive computing, 2010, 51(3): 295?300.
[6] FERNANDEZ T M, RODAS J, ESCUDERO C J, et al. Bluetooth sensor network positioning system with dynamic calibration [C]// International Symposium on Wireless Communication Systems. [S.l.: s.n.], 2007: 45?49.
[7] GEZICI S. A survey on wireless position estimation [J]. Wireless personal communications, 2008, 44(3): 263?282.
[8] 姜莉.基于WiFi室內定位關鍵技術的研究[D].大連:大連理工大學,2010.
[9] 王睿,趙方,彭金華,等.基于WiFi和藍牙融合的室內定位算法[J].計算機研究與發展,2011,48(z2):28?33.
[10] 劉明偉,劉太君,葉焱,等.基于低功耗藍牙技術的室內定位應用研究[J].無線通信技術,2015(3):19?23.endprint
