峰值電流控制模式中的自適應斜坡補償技術
2017-10-12 07:28:03張普杰王衛東
網絡安全與數據管理 2017年18期
張普杰,王衛東
(桂林電子科技大學 信息與通信學院,廣西 桂林 541004)
峰值電流控制模式中的自適應斜坡補償技術
張普杰1,王衛東2
(桂林電子科技大學 信息與通信學院,廣西 桂林 541004)
為了解決PWM(脈沖寬度調制)峰值電流模式中當占空比大于50%時發生次斜坡振蕩的問題,提出了一種當輸入輸出電壓變化時補償量跟隨變化的斜坡補償電路方案。與固定斜坡補償電路相比,本文設計的自適應補償電路有更好的跟隨性,還可避免發生過補償問題。電路采用gpdk090 CMOS工藝仿真,由仿真結果可知,該電路可以很好地抑制次諧波振蕩,提高電路的穩定性和性能。
自適應;占空比;峰值電流模式;斜坡補償
Abstract: In order to Solve the problem of sub-harmonic oscillation in PWM peak current mode for duty cycle more than 50%, this paper presents a self-adaptable slope compensation circuit, whose compensation amount varies with input and output voltage automatically. Compared with fixed slope compensation circuit,the adaptive compensation circuits designed in this paper have better follow,also can avoid compensation. The circuit was simulated based on gppdk090 CMOS process. The results show that the circuit could effectively suppress sub-harmonic oscillations and improve stabilization of circuit and performances.
Key words:self-adaptation; duty cycle; peak current mode; slope compensation
0 引言
電流模式和電壓模式是開關電源中主要的控制模式,脈沖寬度調制(PWM)電流模技術是現在開關電源管理技術中最常用的控制方法。但PWM電流控制技術也有其自身的缺點:當占空比大于50%時,電流模式控制電路不可避免地會呈現不穩定現象。因此為保證系統能正常工作,必須加入補償電路,來消除開環不穩定現象。
相比于固定斜率補償方法會出現過補償的問題,本文介紹了一種自適應斜坡補償方法,該方法結構簡單,易于實現。文中對提出的電路方案給出了詳細的分析過程、電路結構和仿真結果。仿真結果表明,提出的電路結構可以滿足設計要求,提高系統的穩定性和性能。
1 斜坡補償概述
圖1、圖2中,D為占空比,T為時鐘周期,實線表示沒有加干擾前電感電流的波形,虛線表示加入一個干擾ΔI0后電感電流的波形[1]。
Ve為電壓反饋回路的誤差放大器的輸出,m1、m2分別為電感電流的上升、下降斜率。ΔI0、ΔI1分別表示電感電流的變化量。由圖1、2可以直觀地看出D<50%時電路的穩定性和D>50%時電路的振蕩性。從圖1可看出經過一個周期,電感電流的抖動量滿足:
圖1D<50%時的電感電流波形 圖2D>50%時的電感電流波形

(1)
可以證明經過n個周期后,ΔI0引起的電流誤差ΔIn為:
(2)
其中:

(3)
由公式(2)可知:當占空比D<50%時,ΔIn將逐漸衰減到0,系統是收斂的;當占空比D>50%(即D>1-D)時,正好相反,ΔIn將逐漸增大,這種情況下系統是不穩定的,將會產生振蕩[2]。
為解決當占空比大于50%時發生振蕩的問題,固定斜坡補償電路或自適應斜坡補償電路是現在主要的兩種解決此類問題的方法。圖3 所示為固定斜坡補償原理,電路中疊加一個數值為-m(m>0)的斜坡電流信號,由圖得到:
(4)
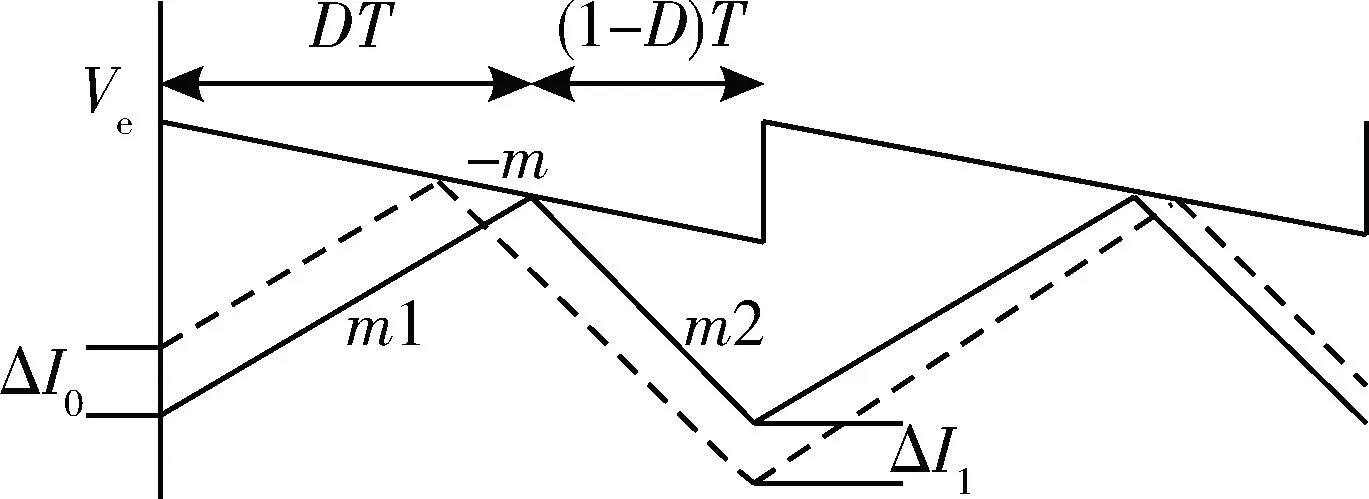
圖3 固定斜坡補償
要使環路保持穩定,需要滿足:
(5)
再由公式(3)和式(5)可推得:
(6)
如果取極限情況,讓占空比為1,則m的最小值為0.5*m2,一般實際設計中都會大于這個值。
固定斜坡補償的方法有個最大的缺點是可能會出現過補償現象,為了防止由于過補償現象對系統產生影響,文中設計出一種自適應斜坡動態補償電路:這種電路中占空比會跟著負載的變動而發生改變,重載時占空比會變大,而輕載時占空比會變得非常小,通過電路的自動調節使系統不會出現固定斜率補償電路時的過補償現象,從而使系統更穩定。從文獻[3]中可以得到:

(7)
(8)
(9)
由式(9)可以看出斜坡補償斜率和輸出輸入電壓差值(即Vout-0.5Vin)是有直接關系的,最終會為系統提供如圖4所示的補償信號。
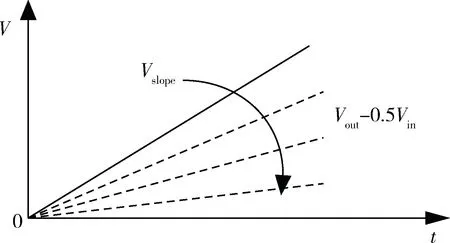
圖4 自適應斜坡補償信號波形示意圖
隨輸入輸出信號改變的相對應的斜坡補償信號,既能使系統達到穩定,又可以防止出現過補償現象。在圖4中,實線表示最壞情況下的斜坡補償波形,虛線表示隨著Vout-0.5Vin的差值改變而相對應的斜坡補償信號波形。在實際的電路實現時,要考慮補償余度的問題,可使占空比小于0.4(即輸出輸入電壓差變為Vout-0.4Vin)時斜坡補償斜率為0[4]。
2 自適應斜坡補償電路實現
圖5所示為本文提出的自適應斜坡補償方案的詳細電路結構。
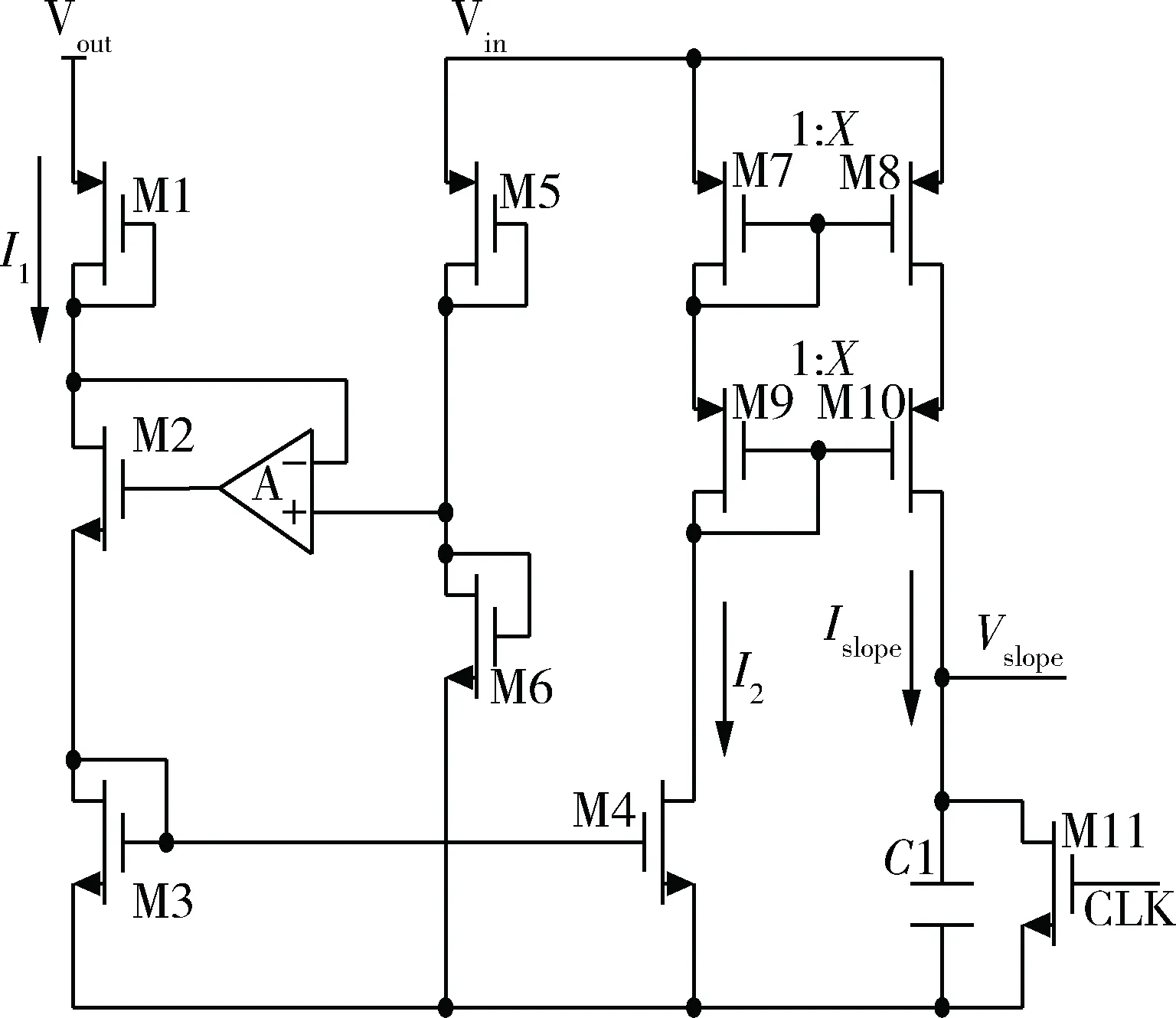
圖5 自適應斜坡補償電路
電路中運放A和NMOS管M2組成電壓跟隨器結構,M1管柵漏短接可以等效為有源電阻,M5、M6與M1原理一樣也相當于有源電阻,其電阻值(假設λ=0)分別可表示為[5]:

(10)
(11)
根據前面分析,為了達到當占空比在40%時使系統開始作用,R6對Vin的分壓應為0.4Vin,調節M5、M6的寬長比使其滿足M6對Vin的分壓。這里由于運放A虛短的特性會使VD2=VD6=0.4Vin。M1相當于有源電阻,所以流過M1的電流I1由Vout和0.4Vin決定,電流大小為:
(12)
電路中M3、M4、M7、M9的寬長比相同,且都為M8、M10的1/X。R1為M1的等效地有源電阻值。也可得到流過M8/10的電流為:
(13)
由式(13)可以看出:斜坡補償電流Islope的大小與Vout-0.4Vin成線性關系,由此電流會隨Vout和Vin變化,電流對電容C1充電的電壓也會改變。根據微分公式[6]:

(14)
可得斜坡電壓的補償斜率:
(15)
對于公式(15)只要給出合適的C和X,以及M1的寬長比,就可以得到合適的動態斜坡補償信號。
圖6是該結構中運放A的實際結構圖。
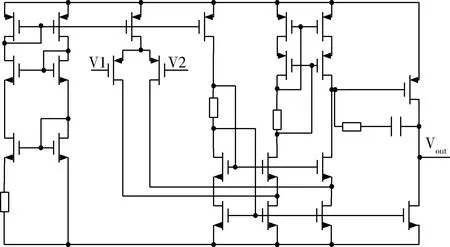
圖6 運放A的實際電路結構
3 仿真驗證
最后對本文所提出的方案結合一款降壓型開關電源變換器,采用gpdk090 CMOS工藝設計,用Cadence軟件進行仿真、驗證。
仿真結果如圖7、8所示,由圖可以看出不管輸出電壓改變還是輸入電壓改變,系統的動態特性都很好,可以產生相應的斜坡補償信號,還可避免發生過補償問題。
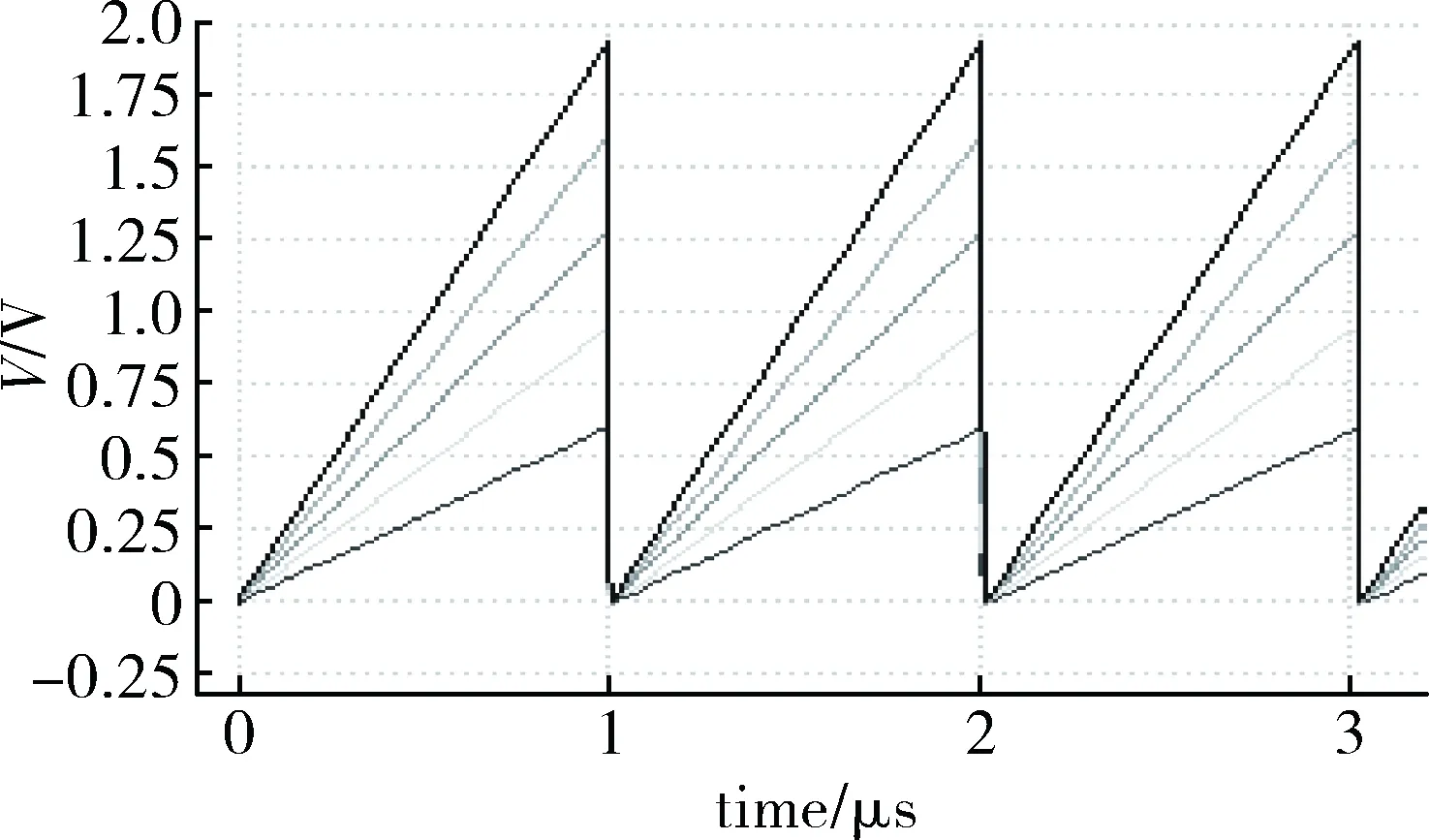
圖7 輸出電壓從1.5 V變化到2.5 V時斜坡補償 電壓的變化(Vin=3.6 V)
4 結論
由于PWM電流模式控制電路在占空比大于50%時會出現開環不穩定現象,使系統不穩定,所以本文設計了一種自適應斜坡補償電路,來避免系統發生振蕩。文中詳細地分析了產生振蕩的原因,并提出了完整的補償電路方案,對電路進行了仿真、驗證。從結果可以看出:文中設計的電路不管輸出電壓變化還是輸入電壓變化,系統的動態特性都很好,可以產生相應的斜坡補償信號,避免發生過補償問題的同時,很好地改善了系統的性能。
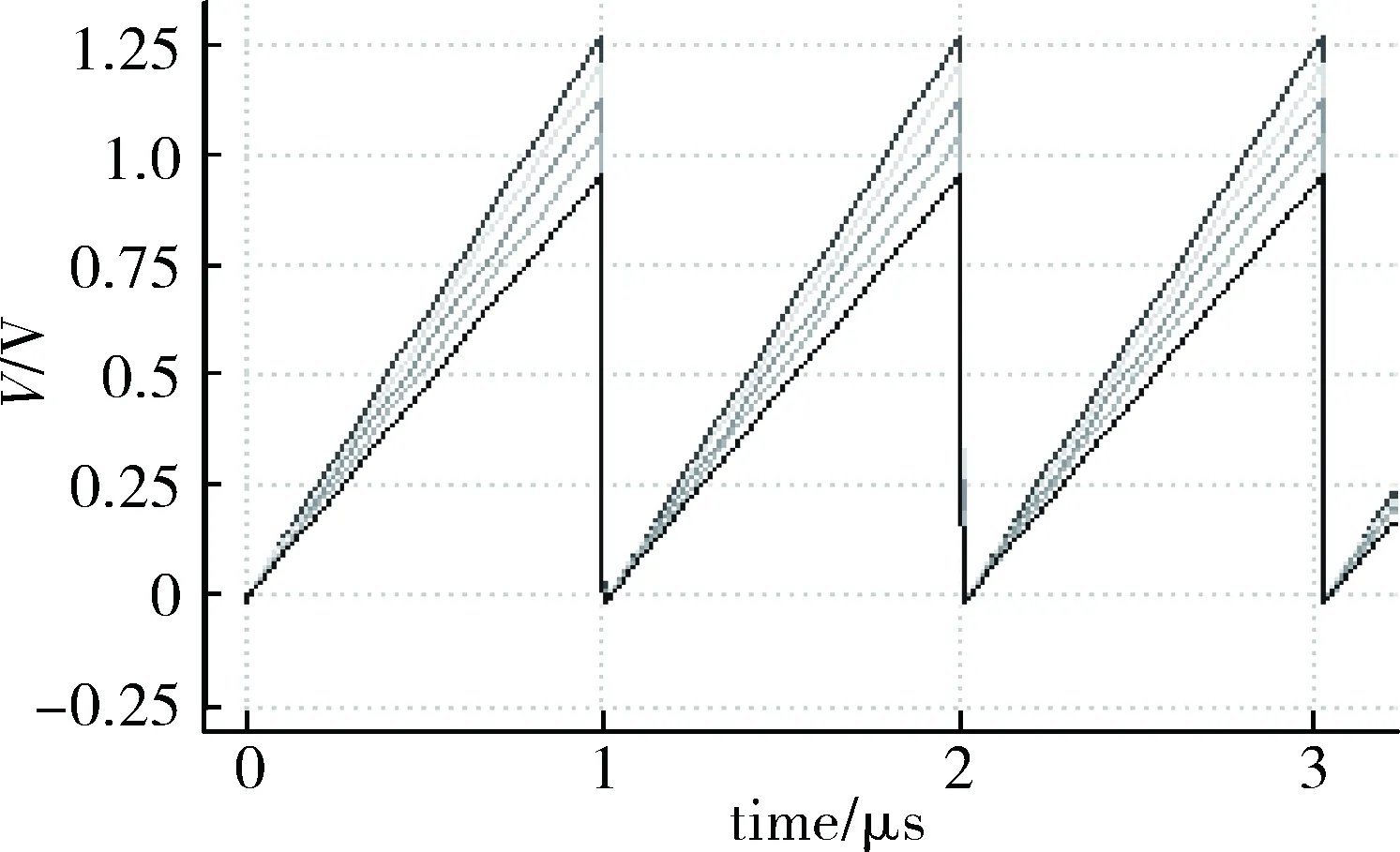
圖8 輸入電壓從2.5 V變到3.8 V時斜坡補償 電壓的變化(Vout=1.8 V)
[1] 陳富吉,來新泉,李玉山.一種自適應斜坡補償電路的設計與實現[J].半導體學報,2008,29(3):593-596.
[2] 徐輝,胡永貴.一種用于DC-DC變換器的斜坡補償電路設計[J].微電子學,2014,44(2):141-144.
[3] 王曉光.高速高精度BUCK型DC-DC轉換器的研究與設計[D].西安:西安科技大學,2010.
[4] 田錦明,王經卓,曹雙貴,等.峰值電流模式變換器自適應斜坡補償電路設計[J].電子器件,2008,31(2):480-483.
[5] 劉雪飛,丁召,郝紅蕾,等.一種降壓型DC-DC變換器動態斜坡補償電路的設計[J].微電子學,2013,43(2):206-209.
[6] 田錦明,王松林,來新泉,等.峰值電流控制模式中的分段線性斜坡補償技術[J].電子器件,2006,29(3):864-873.
Technology of self-adaptation slope compensation in peak current mode controlled circuit
Zhang Pujie1, Wang Weidong2
(School of Information and Communication Engineering, Guilin University of Electronic Technology, Guilin 541004, China)
TN432
A
10.19358/j.issn.1674- 7720.2017.18.014
張普杰,王衛東.峰值電流控制模式中的自適應斜坡補償技術[J].微型機與應用,2017,36(18):46-48.
2017-03-25)
張普杰(1991-)男,碩士研究生,主要研究方向:模擬集成電路設計。
王衛東(1956-) 男,教授,碩士生導師,主要研究方向:模擬集成電路與電流模式電路。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
