基于BP_Adaboost神經(jīng)網(wǎng)絡(luò)的船舶槳葉故障預(yù)警模型*
2017-10-12 07:28:26吳勁松徐志京
網(wǎng)絡(luò)安全與數(shù)據(jù)管理 2017年18期
吳勁松,徐志京
(上海海事大學(xué) 信息工程學(xué)院,上海 201306)
基于BP_Adaboost神經(jīng)網(wǎng)絡(luò)的船舶槳葉故障預(yù)警模型*
吳勁松,徐志京
(上海海事大學(xué) 信息工程學(xué)院,上海 201306)
為了提高船舶槳葉故障識別率,構(gòu)建了一種基于BP_Adaboost神經(jīng)網(wǎng)絡(luò)的船舶槳葉故障預(yù)警模型。該模型首先采用數(shù)字水聽器采集二進制船舶槳葉靜水噪聲信號,并利用MATLAB編程將二進制信號轉(zhuǎn)換成WAV音頻信號,通過梅爾頻率倒譜系數(shù)法(Mel-Frequency Cepstral Coefficient, MFCC)提取特征值,得到36維槳葉靜水噪聲信號,最后運用BP_Adaboost神經(jīng)網(wǎng)絡(luò)進行分類識別預(yù)警。實驗結(jié)果表明,基于BP_Adaboost神經(jīng)網(wǎng)絡(luò)的船舶槳葉故障預(yù)警模型能夠高效分類預(yù)警船舶槳葉故障,與BP神經(jīng)網(wǎng)絡(luò)識別率對比,分類識別預(yù)警率高達96%。
船舶槳葉故障預(yù)警模型;數(shù)字水聽器;MFCC;BP_Adaboost
Abstract: In order to improve the fault recognition rate of ship blades, a fault prediction model based on BP_Adaboost neural network is proposed in this paper. The model uses digital hydrophone acquisition to collect binary data of ship hydrostatic blade noise, and uses MATLAB to convert binary signal into WAV audio format. Then the model uses Mel-Frequency Cepstral Coefficient (MFCC) feature extraction method to extract features and gets the water noise signal in the 36 dimension, and finally uses BP_Adaboost neural network to classify and warn the fault of ship blades. The experimental result shows that the fault prediction model based on BP_Adaboost neural network can effectively classify and predict the failure of the ship blades compared with the BP neural network. The classification and recognition warning rate is as high as 96%.
Key words:ship blades faults warning model; digital hydrophone acquisition ;MFCC;BP_Adaboost
0 引言
船舶是重要的水上交通工具,螺旋槳是船舶將發(fā)動機力矩轉(zhuǎn)換成動能的主要裝置[1],主機輸出轉(zhuǎn)矩通過軸系帶動螺旋槳旋轉(zhuǎn),螺旋槳產(chǎn)生的推力推動船舶航行。由于各種不同原因造成螺旋槳折斷、缺損,槳葉故障會導(dǎo)致主機故障,嚴重影響了船舶的航行安全[2],因此研究船舶槳葉故障具有理論與現(xiàn)實意義。傳統(tǒng)的船舶故障診斷法有四種:直接測量法、數(shù)字測量法、故障樹分析法、專家診斷法[3]。近年來神經(jīng)網(wǎng)絡(luò)算法的興起,為船舶槳葉故障預(yù)警提供了新的思路。相對于傳統(tǒng)的船舶槳葉故障診斷法,神經(jīng)網(wǎng)絡(luò)能夠及早分類識別預(yù)警船舶槳葉故障,為船舶故障診斷排除提供了可靠依據(jù),對于船舶運輸以及國防科研具有重要意義。本文提出了基于BP_Adaboost神經(jīng)網(wǎng)絡(luò)的船舶槳葉故障預(yù)警模型,采用數(shù)字水聽器采集槳葉靜水噪聲,利用MFCC特征提取方法提取特征值,最后通過神經(jīng)網(wǎng)絡(luò)判斷船舶槳葉的狀態(tài),具有良好的識別判斷效果。
1 數(shù)據(jù)采集及轉(zhuǎn)換部分
1.1 DHP8501數(shù)字水聽器簡介
該模型采用的是DHP8501數(shù)字水聽器采集數(shù)據(jù),DHP8501數(shù)字水聽器是由中國科學(xué)院聲學(xué)研究所研發(fā)的產(chǎn)品,可以采集、存儲、傳輸水聲信號,它具有放大調(diào)理電路,不需要前置放大器、濾波器和采集器,使用起來更加簡單,具有出色的穩(wěn)定性和抗干擾能力,而且具有本底噪聲低、動態(tài)浮動范圍大、采集數(shù)據(jù)精度高、提供絕對聲壓值和相對聲壓級等特點。其基本參數(shù)如表1表示。
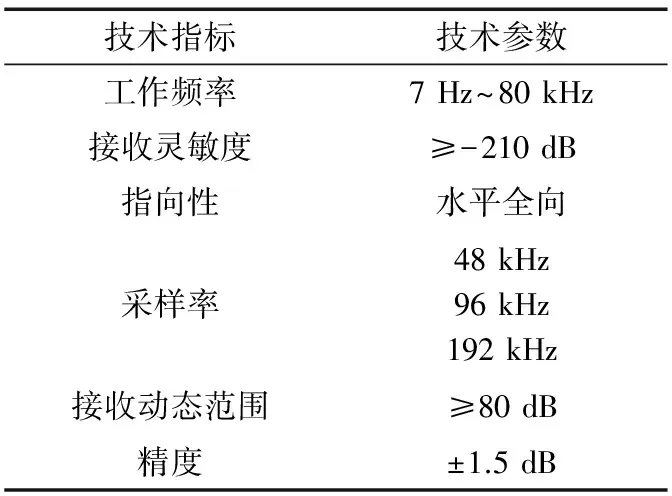
表1 DHP8501數(shù)字水聽器技術(shù)指標
1.2信號采集轉(zhuǎn)換
DHP8501數(shù)字水聽器采集的槳葉噪聲信號以二進制的格式儲存,由于二進制信號不利于進行濾波與特征提取,因此將二進制的信號轉(zhuǎn)換為WAV格式信號。該模型采用MATLAB編程將二進制數(shù)信號換成WAV格式的信號,在編程方面調(diào)用wavwrite(y,Fs,filename)函數(shù),其中y為噪聲信號存儲向量,F(xiàn)s為存儲信號的頻率,filename為噪聲信號文件名。
在該模型中共采集了3組槳葉噪聲信號,噪聲信號來源于船舶模型,該模型是雙槳電力驅(qū)動船。采集噪聲分為三類:雙槳槳葉一組損壞,雙槳槳葉完好,雙槳槳葉全部損壞。為了采集數(shù)據(jù)需要,對部分螺旋槳葉進行人為損壞。
所有噪聲信號均在靜水池中采集,每組噪聲信號持續(xù)50 s,噪聲信號采集轉(zhuǎn)換之后幅值圖如圖1~3所示,其中圖1為雙槳槳葉一組損壞噪聲信號,圖2雙槳槳葉完好噪聲信號,圖3為雙槳槳葉全部損壞噪聲信號。
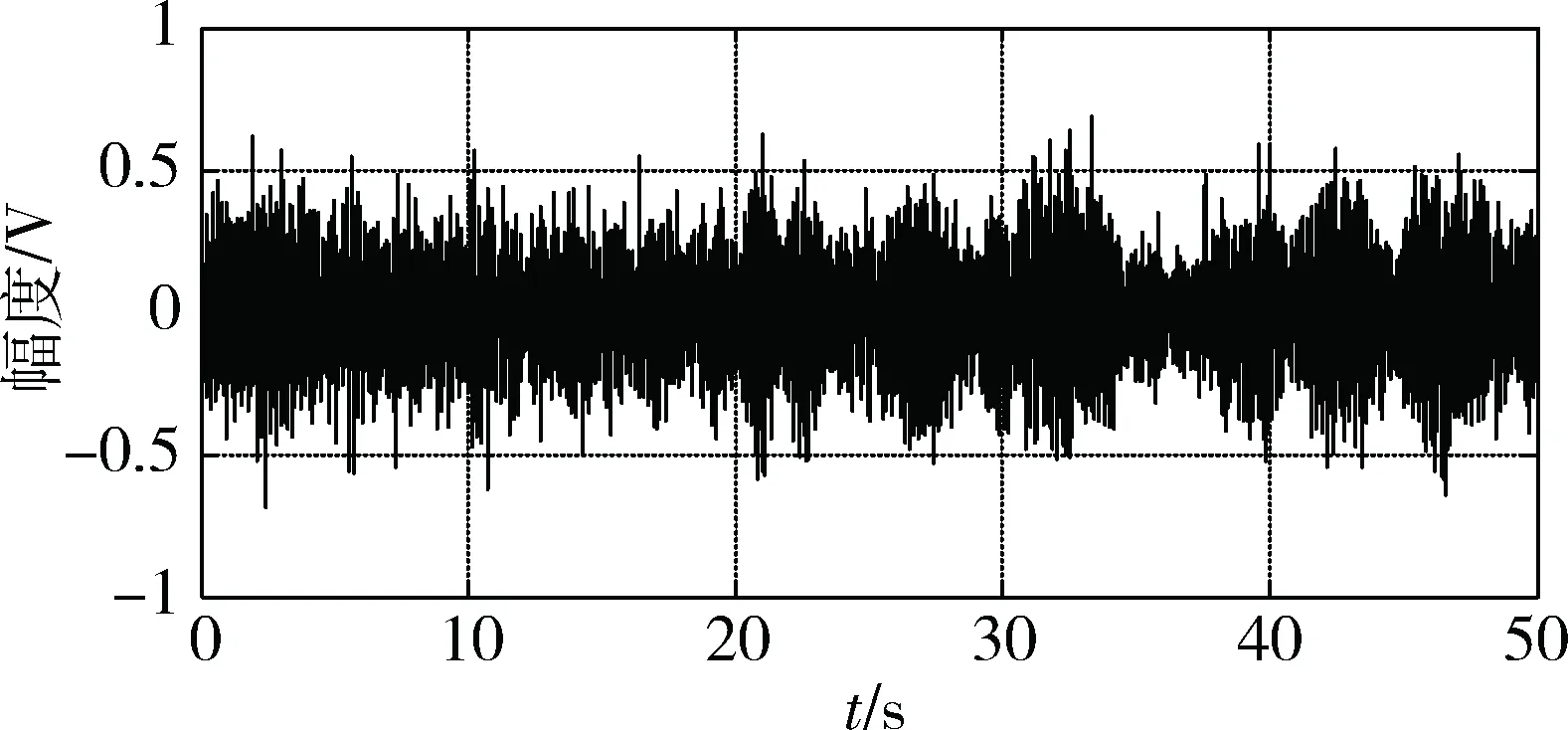
圖1 雙槳槳葉一組損壞信號
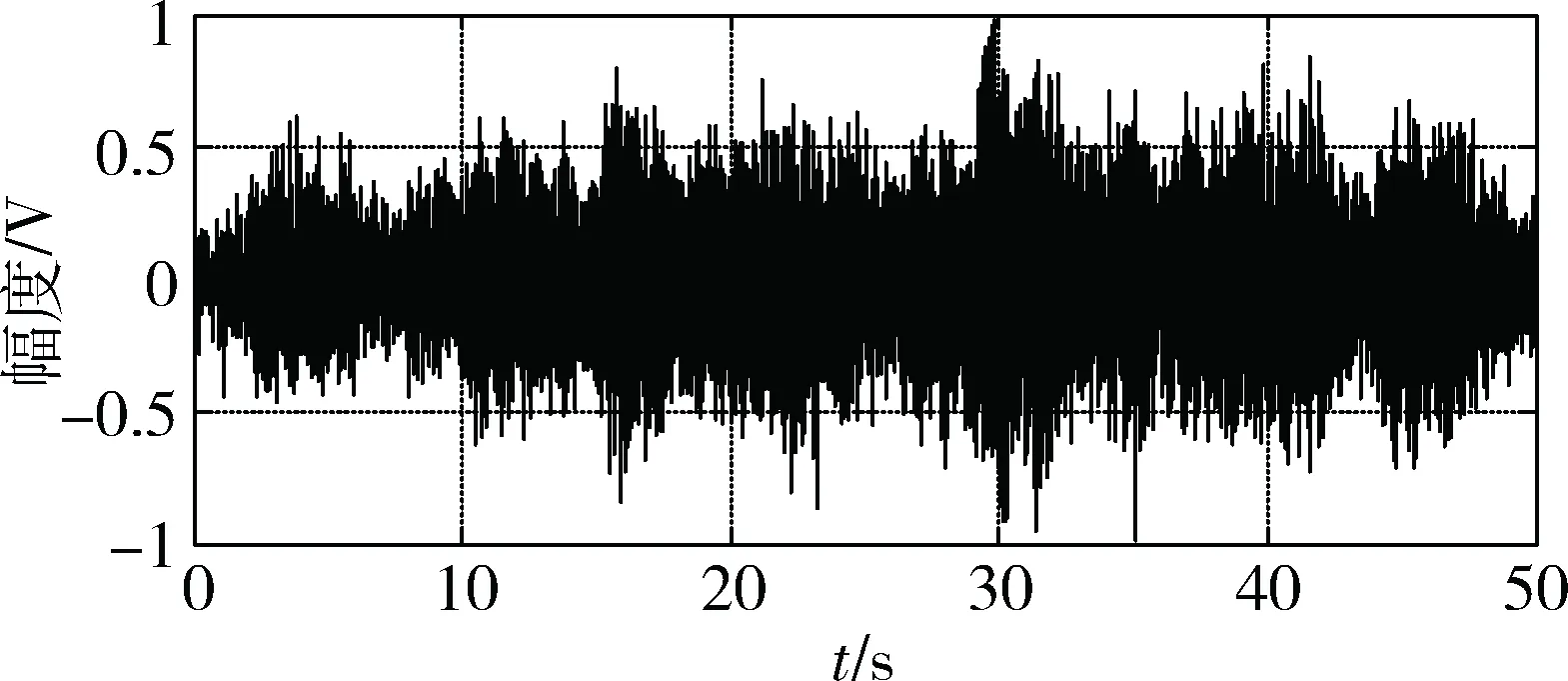
圖2 雙槳槳葉完好信號
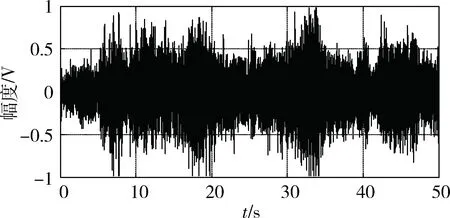
圖3 雙槳槳葉全部損壞信號
2 MFCC特征值提取部分
2.1 MFCC
梅爾倒譜系數(shù)(Mel-Frequency Cepstral Coefficient,MFCC)模擬了人耳對語音的處理機制,應(yīng)用了人耳聽覺感知方面的研究成果,在有信道噪聲和頻譜失真的情況下具有較好的穩(wěn)定性[4]。MFCC特征參數(shù)提取步驟如下:
(1)數(shù)據(jù)預(yù)處理。預(yù)處理有三步:預(yù)加重、分幀、加窗函數(shù)。為了補償高頻分量的損失進行預(yù)加重。預(yù)加重濾波器設(shè)為:
H(z)=1-az-1
(1)
其中a為常數(shù),分幀是把一段信號分成更小段的穩(wěn)態(tài)信號。為了減少頻域中的泄露,對每一幀信號乘以一個漢明窗。x(n)經(jīng)預(yù)處理之后成為xi(m),i為處理后的第i幀。
(2)快速傅里葉變換。對每一幀短時信號進行FFT變換,信號從時域變?yōu)轭l域:
X(i,k)=FFT(xi(m))
(2)
(3)計算譜線能量。對每一幀F(xiàn)FT后的信號計算譜線的能量:
E(i,k)=[Xi(k)]2
(3)
(4)計算梅爾濾波器的能量。把每一幀的能量譜E(i,k)(其中i表示第i幀,k表示第k條譜線)與梅爾濾波器的頻域響應(yīng)Hm(k)相乘并求和:

(4)

(5)

(6)
式中,S(i,m)是由公式(4)求出的梅爾濾波器能量,m是指第m個梅爾濾波器,i是指第i幀,n是DCT后的譜線。
2.2對槳葉噪聲進行特征值提取
在該模型中,使用MFCC對三類噪聲信號進行特征值提取,總共得到1 500組噪聲信號特征值,每組信號500幀36維。第一類為雙槳槳葉一組損壞信號,如圖4所示;第二類為雙槳槳葉完好信號,如圖5所示;第三類為雙槳槳葉全部損壞信號,如圖6所示。從1 500組信號中隨機選取1 200組作為訓(xùn)練數(shù)據(jù),其余300組作為測試數(shù)據(jù)。
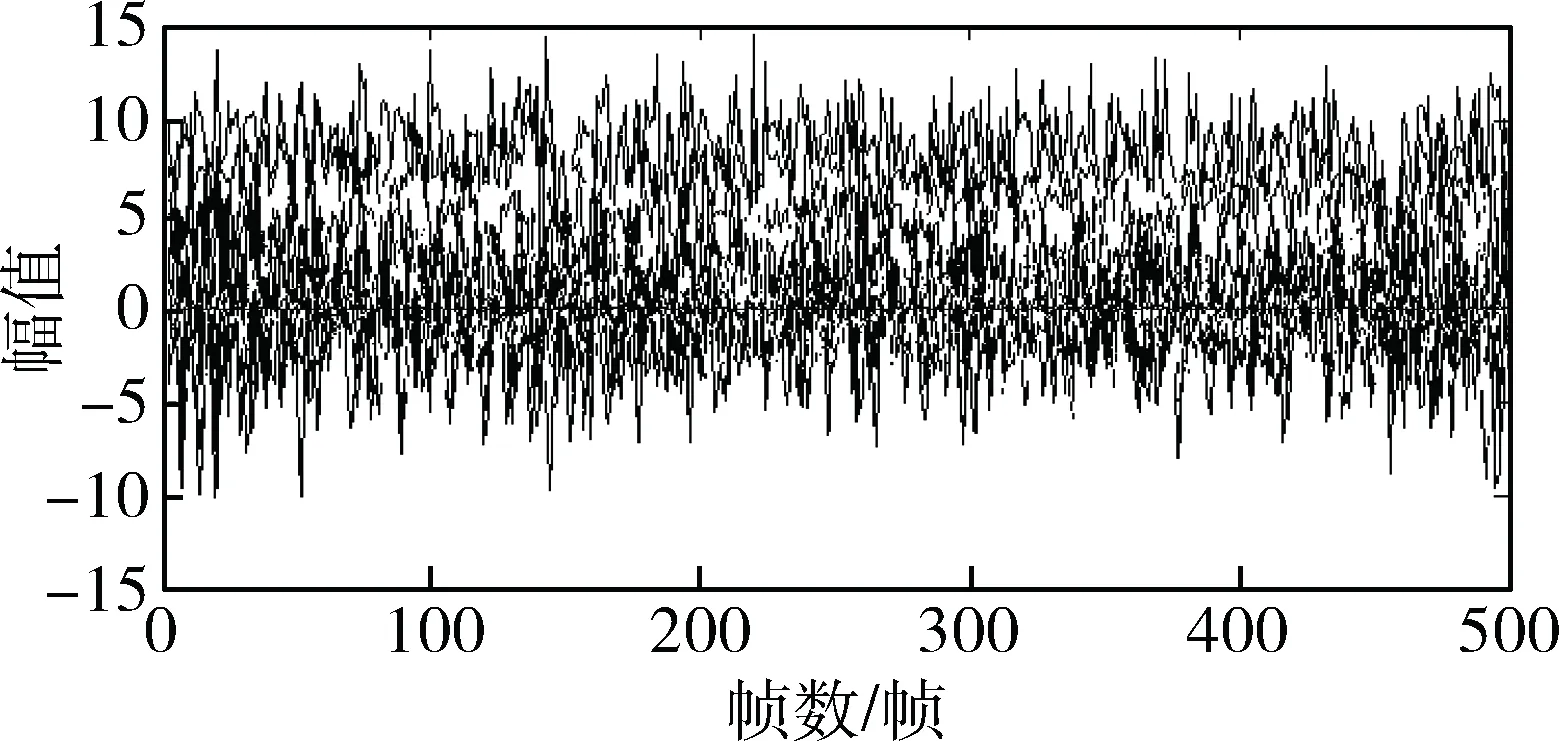
圖4 雙槳槳葉一組損壞信號
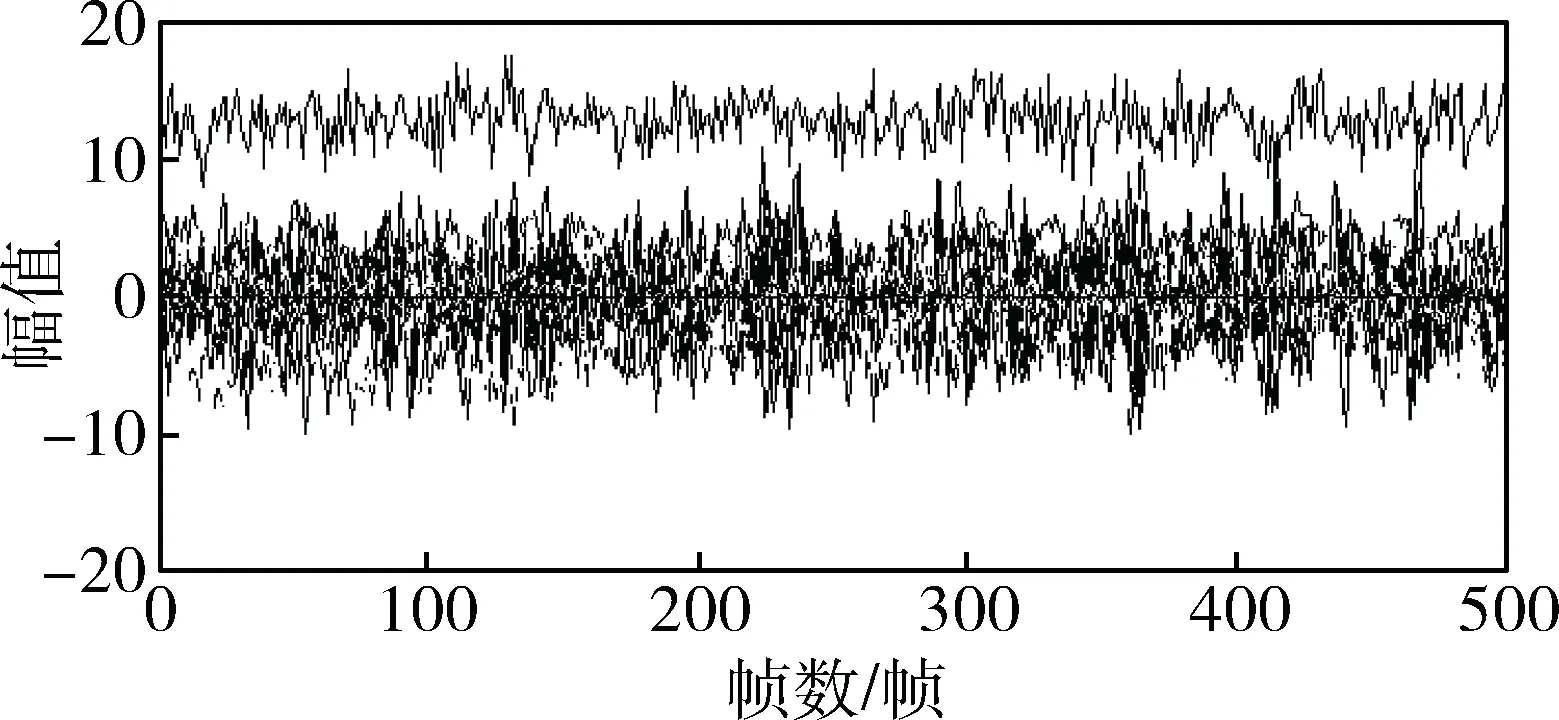
圖5 雙槳槳葉完好信號
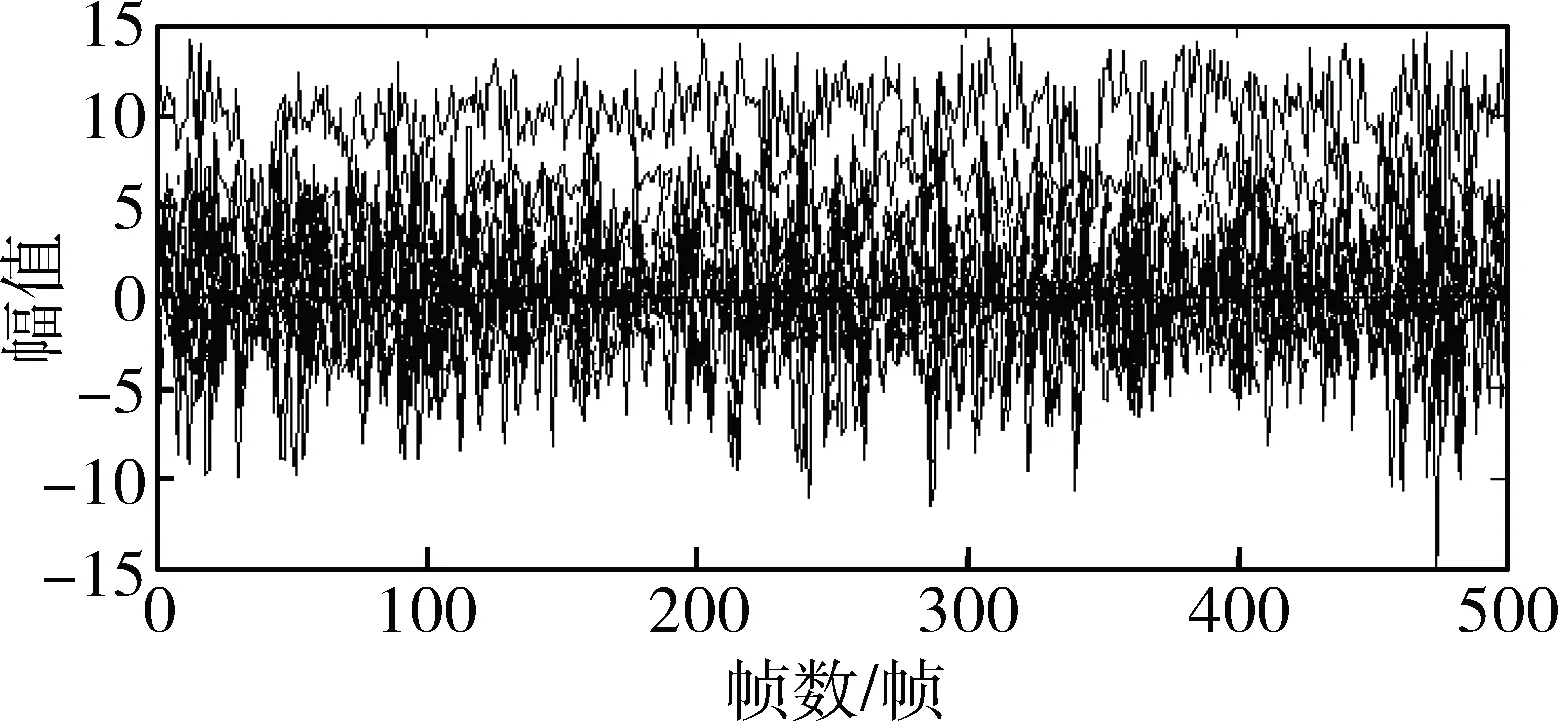
圖6 雙槳槳葉全部損壞信號
3 船舶槳葉故障分類識別預(yù)警部分
3.1 BP_Adaboost模型原理
BP_Adaboost算法核心是:以一個弱分類器為基礎(chǔ),在此基礎(chǔ)上疊加多個弱分類器成為一個強分類器,進而產(chǎn)生一個強有效分類[5]。主要步驟有三步:
(1)選定一種神經(jīng)網(wǎng)絡(luò),把它作為弱分類器,并準備樣本空間(x,y),在樣本空間隨機選取n組作為訓(xùn)練樣本,每組權(quán)值為1/n。
(2)用弱分類器神經(jīng)網(wǎng)絡(luò)迭代T次,將完整迭代后的權(quán)值作為新的權(quán)值,在樣本訓(xùn)練失敗后,該樣本將賦予更大的權(quán)值,反復(fù)迭代之后,得到一個分類函數(shù)序列f1,f2,…,fT。另外,在分類函數(shù)序列完成之后,都會有一個匹配的權(quán)重,大的權(quán)重將一直賦予分類結(jié)果好的分類函數(shù)。
(3)迭代T次之后,弱分類器加權(quán)產(chǎn)生一個強分類函數(shù)F。在本文中運用36個BP神經(jīng)網(wǎng)絡(luò)構(gòu)成一個強分類網(wǎng)絡(luò)即BP_Adaboost模型,將BP組反復(fù)訓(xùn)練,并預(yù)測其輸出,在這過程中確定其權(quán)值閾值。
3.2船舶故障預(yù)警系統(tǒng)模型
基于BP_Adaboost神經(jīng)網(wǎng)絡(luò)的船舶槳葉故障預(yù)警模型流程圖如圖7所示。
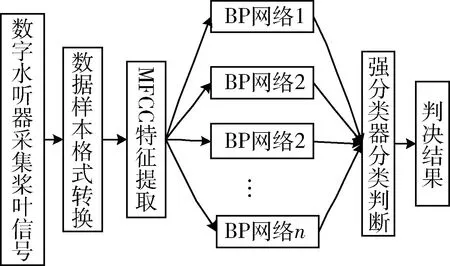
圖7 預(yù)警模型流程圖
BP_Adaboost神經(jīng)網(wǎng)絡(luò)算法步驟如下[6]:
(1)數(shù)據(jù)選擇和網(wǎng)絡(luò)初始化。初始化測試數(shù)據(jù)的分布權(quán)值取決于選定樣本的個數(shù),假如選定樣本數(shù)目為m,分布權(quán)值為Dt(i)=1/m,神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)由樣本的輸入特征值的維數(shù)以及輸出維數(shù)確定。
(2)弱分類器預(yù)測。對弱分類器進行循環(huán)訓(xùn)練,假如循環(huán)t次,將每一次的誤差求和,得到預(yù)測訓(xùn)練序列g(shù)(t)的預(yù)測誤差和et:

(7)
其中g(shù)(t)為分類預(yù)測結(jié)果,y為期望分類結(jié)果。
(3)計算預(yù)測序列權(quán)重。根據(jù)步驟(2)的誤差和來計算序列權(quán)重。計算公式為:
(8)
(4)調(diào)整測試數(shù)據(jù)權(quán)重。將步驟(3)中的at代入到公式(9)中求得測試數(shù)據(jù)權(quán)重,Bt為歸一化因子,公式為:

(9)
(5)強分類函數(shù)。強分類函數(shù)主函數(shù)為sign(x)函數(shù),將循環(huán)T次計算得到的序列權(quán)重at和弱分類器函數(shù)f(gt,at)相乘并加權(quán)求和,代入sign(x)函數(shù)就得到強分類器函數(shù)h(x)。

(10)
對于該預(yù)警模型,有1 500組船舶槳葉靜水噪聲數(shù)據(jù),每組輸入為36維,輸出為一維,代表船舶狀況,輸出數(shù)據(jù)中小于0時賦值為-1,表示船舶槳葉故障;大于0時賦值為1,表示船舶槳葉狀況良好。根據(jù)輸入輸出狀況,BP神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)為36-37-1,用BP神經(jīng)網(wǎng)絡(luò)作為弱分類器,將36個弱分類器通過加權(quán)得到一個強分類輸出對船舶槳葉狀況進行分類判別。
4 模型預(yù)測結(jié)果及分析
在該模型中,BP神經(jīng)網(wǎng)絡(luò)構(gòu)成的弱分類器,經(jīng)隨機選取的1 200組訓(xùn)練樣本訓(xùn)練后,調(diào)整訓(xùn)練樣本權(quán)重值,得出一系列弱分類器及權(quán)重,并用訓(xùn)練好的弱分類器構(gòu)成強分類器。為了消除BP神經(jīng)網(wǎng)絡(luò)初始化權(quán)值閾值的隨機性,連續(xù)做了50次實驗,結(jié)果如圖8所示。可以看出強分類器誤差率低于弱分類器,分類效果好,強分類器的分類誤差率普遍分布在4%左右,弱分類器的分類誤差率在6%左右。從實驗中可以得出運行次數(shù)對分類器的誤差率影響不大,體現(xiàn)了該模型的穩(wěn)定性。
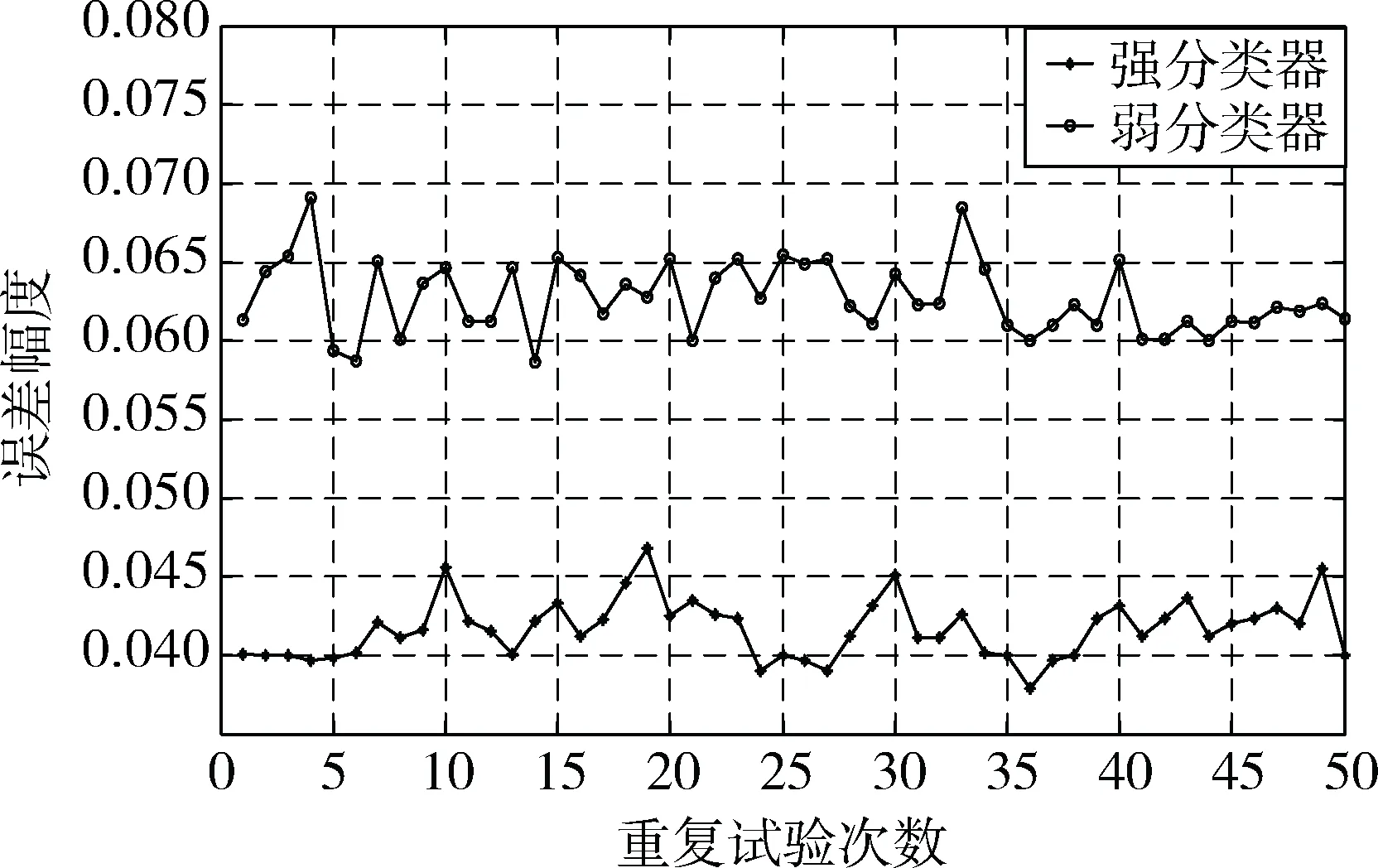
圖8 試驗次數(shù)對兩種分類器誤差率影響
在強分類器中有兩種分類誤差,把船舶指標正常的樣本判斷為不合格的錯誤叫第一類分類錯誤;把船舶指標不合格的樣本判斷為正常的錯誤叫第二類分類錯誤。圖9為強分類器兩類樣本的分類情況,可以看出測試樣本中強分類器的兩類誤差分布,第一類分類誤差顯然少于第二類分類誤差,第一類分類錯誤數(shù)目為0,第二類分類錯誤數(shù)目為13。
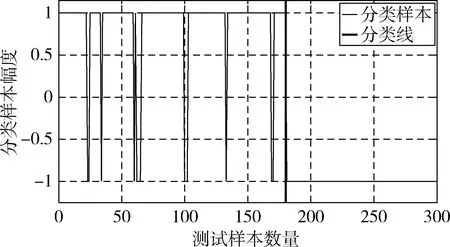
圖9 強分類器兩類樣本分類情況
5 結(jié)論
本文構(gòu)建了一個船舶槳葉故障分類預(yù)警模型,首先,在數(shù)據(jù)采集與轉(zhuǎn)換中,運用DHP8501數(shù)字水聽器采集了3類船舶槳葉二進制噪聲,通過數(shù)據(jù)轉(zhuǎn)換,將二進制數(shù)據(jù)信號轉(zhuǎn)換成較容易處理的WAV格式信號,克服了槳葉噪聲處理的難題。然后,充分利用MFCC在提取特征值時識別和抗噪能力強的特征,對船舶槳葉故障噪聲進行特征值提取,得到36維1 500組槳葉噪聲信號,滿足了神經(jīng)網(wǎng)絡(luò)訓(xùn)練分類的要求。最后,該模型充分利用了Adaboost神經(jīng)網(wǎng)絡(luò)的聚焦難分類樣本和訓(xùn)練效果越好權(quán)重越大兩個優(yōu)點,在1 200組數(shù)據(jù)訓(xùn)練之后該模型將訓(xùn)練后的神經(jīng)網(wǎng)絡(luò)加權(quán)得到一個強分類器,經(jīng)300組測試數(shù)據(jù)測試之后,取得了約96%的正確分類預(yù)警率。基于BP_Adaboost神經(jīng)網(wǎng)絡(luò)的船舶槳葉故障分類識別預(yù)警模型為船舶槳葉故障預(yù)警提供了新的思路與方法,具有較大的推廣意義。
[1] 陳順陽. 船舶螺旋槳故障原因的分析與探討[J]. 山東工業(yè)技術(shù),2015(8):251.
[2] 歐禮堅. 船舶螺旋槳及推進裝置故障診斷關(guān)鍵技術(shù)研究與應(yīng)用[D].廣州:華南理工大學(xué),2010.
[3] 姜瑩, 任光, 賈寶柱. 船舶故障診斷的新發(fā)展[J]. 航海技術(shù), 2004(1):40-42.
[4] 宮曉梅,王懷陽. 噪聲環(huán)境下MFCC特征提取[J]. 微計算機信息,2007,23(22):247-249.
[5] 許劍,張洪偉. Adaboost算法分類器設(shè)計及其應(yīng)用[J]. 四川理工學(xué)院學(xué)報(自然科學(xué)版),2014,27(1):28-31.
[6] 陸正華,周航.基于BP_Adaboost算法的上市公司財務(wù)預(yù)警研究[J].財會通訊,2013(23): 117-119.
Early ship fault warning model based on BP_Adaboost neural network
Wu Jinsong, Xu Zhijing
(College of Information Engineering, Shanghai Maritime University, Shanghai 201306, China)
TP391.5
A
10.19358/j.issn.1674- 7720.2017.18.016
吳勁松,徐志京.基于BP_Adaboost神經(jīng)網(wǎng)絡(luò)的船舶槳葉故障預(yù)警模型[J].微型機與應(yīng)用,2017,36(18):52-54,58.
國家自然科學(xué)基金(61404083)
2017-02-28)
吳勁松(1987-),男,碩士研究生,主要研究方向:港口無線通信與計算機測控,深度學(xué)習(xí)。
徐志京(1972-),男,工學(xué)博士,副教授,主要研究方向:無線通信,人工智能,深度學(xué)習(xí)。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
