一種并聯式半主動懸架作動器研究
2017-10-17 09:33:12寇發榮魏冬冬
中國機械工程 2017年19期
關鍵詞:振動
寇發榮 梁 津 魏冬冬 王 星 田 蕾
西安科技大學機械工程學院,西安,710054
一種并聯式半主動懸架作動器研究
寇發榮 梁 津 魏冬冬 王 星 田 蕾
西安科技大學機械工程學院,西安,710054
提出了一種并聯式滾珠絲杠半主動懸架作動器結構。建立了滾珠絲杠作動器數學模型,并利用MATLAB/Simulink軟件對并聯式滾珠絲杠半主動懸架作動器進行了阻尼特性與饋能特性仿真,驗證了結構的可行性。仿真結果表明:作動器阻尼力為0~1200 N;作動器在低頻振動下可以產生的饋能電壓為0~6 V,饋能功率為0~80 W,饋能效率為41.61%~48.72%。在參數優化的基礎上試制了作動器物理樣機,齒輪采用鋁制材料經線切割而成,因此作動器響應速度良好,最后進行了作動器饋能特性試驗。
齒輪箱;滾珠絲杠;半主動懸架;能量回收
Abstract:A parallel type ball screw semi-active suspension actuator was proposed. A mathematical model of the actuator was established. The damping characteristics and energy recovery characteristics simulations of the parallel type semi-active suspension actuator were completed by using the MATLAB/Simulink, and the feasibility of the actuator was verified. The results show that, actuator damping force is as 0~1200 N; the energy recovery voltage is as 0~6 V,energy recovery power is as 0~80 W,energy recovery efficiency is from 41.61% to 48.72% under low frequency vibrations. The actuator is trial-produced on the basis of parameter optimization. The actuator response is fine. The energy recovery characteristic tests of actuator were completed.
Keywords:gear box; ball screw; semi-active suspension; energy recovery
0 引言
半主動懸架作動器是一種新型作動器,它不僅可以將減振器耗散掉的能量進行回收,還可以將能量提供給半主動懸架進行懸架半主動控制[1-7];從而不僅提高了車輛的平順性與操縱穩定性,還可以實現半主動懸架的能量自供給[8-12]。目前饋能型半主動懸架作動器的結構形式主要有液壓蓄能式與電磁蓄能式。電磁蓄能式作動器響應快、作動精度高、能量轉化效率高,便于應用推廣[13-15],但目前的電磁蓄能式作動器饋能電機會隨著懸架的上下振動而重復正反轉,不利于能量回收與半主動控制。
本文提出了一種并聯式滾珠絲杠車輛半主動懸架作動器結構。該作動器可以將絲杠的雙向轉動轉換為電機軸的單向轉動并增大電機轉速,避免了饋能電機高頻正反轉,提高了能量回收效率。該作動器具有阻尼力范圍廣、結構可靠性高、傳動效率高、造價低廉等優點。本文建立了滾珠絲杠半主動懸架作動器的數學模型,設計并研制了滾珠絲杠半主動懸架作動器樣機,對滾珠絲杠半主動懸架作動器的饋能特性、阻尼特性進行了仿真,并進行了滾珠絲杠作動器饋能特性試驗。
1 滾珠絲杠作動器方案設計
1.1 滾珠絲杠作動器結構與原理
滾珠絲杠半主動懸架作動器結構如圖1所示,當車輪受到路面激勵進行上下跳動時,下吊耳帶動絲杠螺母上下移動,絲杠進行正反向轉動。
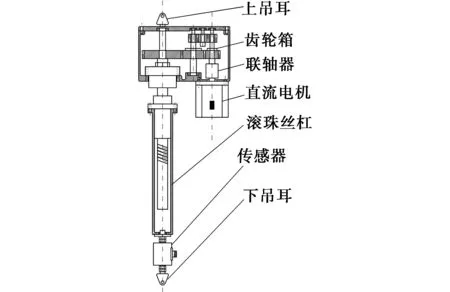
圖1 滾珠絲杠半主動懸架作動器結構簡圖Fig.1 Ball screw type semi-active suspension actuator diagram
該結構中,棘輪機構外所嵌套的齒輪進行順時針旋轉時,可與棘輪機構結合并傳輸動力,逆時針運動時,齒輪空轉不傳輸動力,因此無論作動器處于伸張行程還是壓縮行程,齒輪箱都可以將絲杠的雙向轉動轉換為電機軸的單向轉動,并增大轉速,此時直流電機成為發電機,將振動能量轉化為電能。另外并聯式滾珠絲杠半主動懸架作動器可以通過控制電機回路中的等效電阻,改變電機的電磁力矩,經過齒輪箱的轉矩放大,輸出一個可控的阻尼力,實現作動器的半主動控制。該作動器結構簡單、工作可靠、傳動效率高。
當作動器處于伸張行程時(圖2),作動器下殼體與絲杠螺母垂直向下平動,滾珠絲杠順時針旋轉,絲杠軸與絲杠軸齒輪也順時針旋轉,第二軸第二齒輪逆時針旋轉,第二軸第二齒輪與第二軸棘輪空轉,不傳輸動力,輸出軸第二齒輪順時針旋轉,帶動輸出軸棘輪和輸出軸順時針旋轉,則電機軸順時針旋轉,同時輸出軸和輸出軸第一齒輪順時針旋轉,中間軸齒輪和中間軸逆時針旋轉,第二軸第一齒輪和第二軸順時針旋轉,與第二軸棘輪轉向相反,則第二軸棘輪仍然空轉。
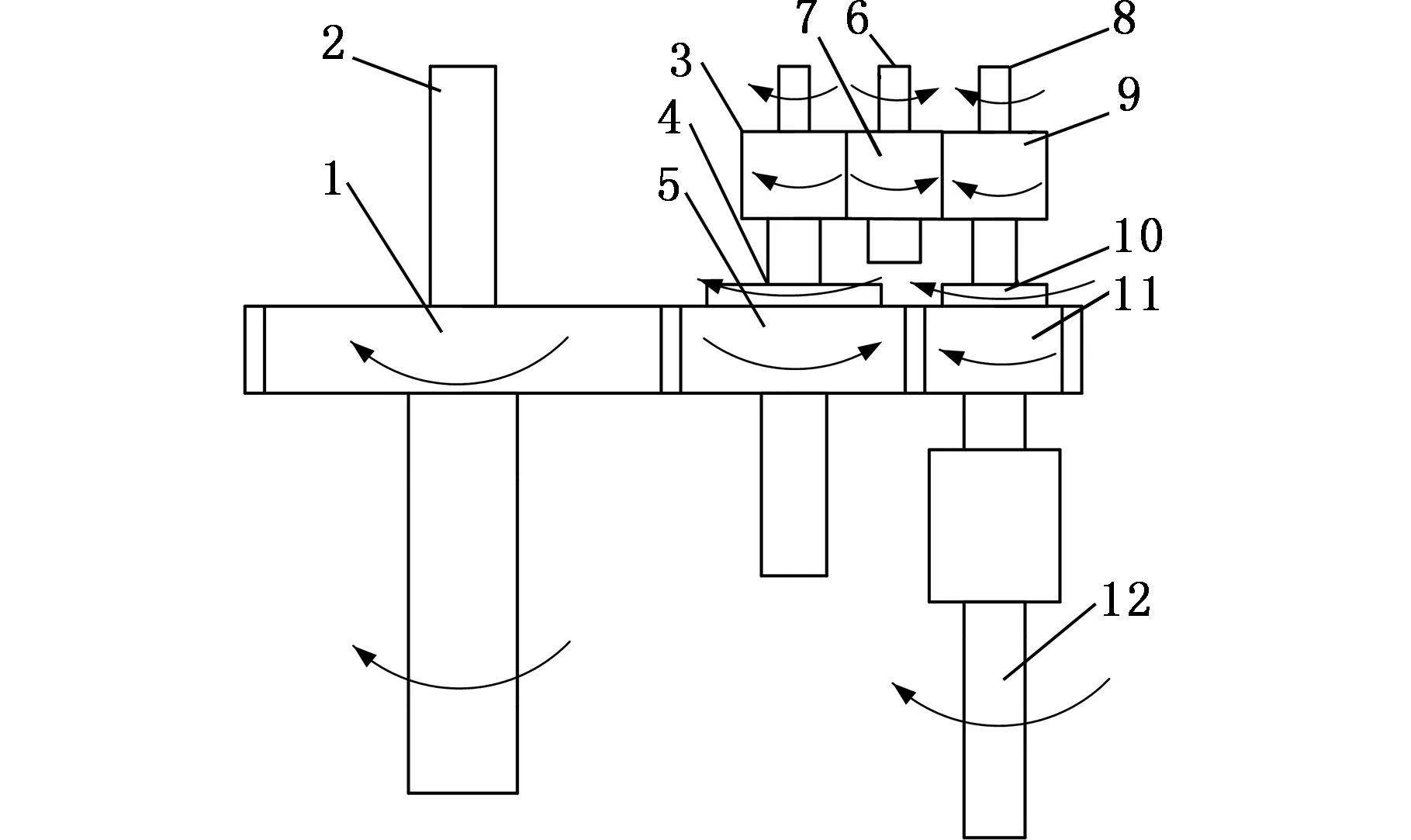
1.絲杠軸齒輪 2.絲杠軸 3.第二軸第一齒輪 4.第二軸棘輪 5.第二軸第二齒輪 6.中間軸 7.中間軸齒輪 8.輸出軸 9.輸出軸第一齒輪 10.輸出軸棘輪 11.輸出軸第二齒輪 12.電機軸圖2 作動器伸張行程齒輪箱傳動示意圖Fig.2 The gear box transmission of actuator stretching diagram
當作動器處于壓縮行程時,情況與圖2相反,作動器下殼體與絲杠螺母垂直向上平動,滾珠絲杠逆時針旋轉,絲杠軸與絲杠軸齒輪也逆時針旋轉,則第二軸第二齒輪順時針旋轉,輸出軸第二齒輪逆時針空轉,不傳輸動力,而第二軸第二齒輪帶動第二軸棘輪順時針旋轉,第二軸和第二軸第一齒輪順時針轉動,中間軸與中間軸齒輪逆時針旋轉,輸出軸第一齒輪順時針旋轉,輸出軸順時針旋轉,電機軸順時針旋轉,輸出軸第二齒輪與輸出軸棘輪仍然空轉。
無論作動器處于伸張行程還是壓縮行程,均可以通過該齒輪箱,使得電機軸始終朝同一方向轉動,且能增大電機的轉速。這樣,不僅避免了電機頻繁的正反轉運動,而且提高了能量回收效率。
1.2 滾珠絲杠作動器參數選型
滾珠絲杠選用國標系列尺寸,絲杠小導程可以提高饋能效率、提高半主動控制精度,因此選擇的滾珠絲杠導程較小。為應對在車輛行駛過程中可能出現的較大沖擊,提高作動器的承載能力,選擇較大絲杠直徑。在此選擇的滾珠絲杠直徑d=25 mm,導程l=10 mm,絲杠長度L=350 mm。
永磁直流無刷電機體積小、質量輕、效率高、低速性能好,與滾珠絲杠作動器的運動特性相匹配,因此本文選用直流無刷電機。具體參數為:額定電壓Ue=48 V,額定功率Pe=500 W,電機內阻Rn=0.15 Ω。
作動器齒輪箱采用6個圓柱直齒齒輪,齒深均為2.25 mm,齒厚均為10 mm。該齒輪重合系數大、傳動平穩、齒輪強度高。具體的結構參數為:絲杠軸齒輪齒數z1=100,第二軸第一齒輪齒數z2=30,第二軸第二齒輪齒數z3=80,輸出軸第二齒輪齒數z4=40,輸出軸第一齒輪齒數z5=30,中間軸齒輪齒數z6=30。
作動器樣機如圖3所示,其傳動部件較多,部件的隨機制造誤差、齒輪齒側間隙、嚙合誤差、受載變形等均會對作動器響應速度產生影響。為了提高該作動器的響應速度,圓柱直齒齒輪材料為鋁制材料,采用線切割工藝進行加工,這樣不僅減小了齒輪的質量,還減小了齒輪的隨機制造誤差;齒輪箱外殼采用加工中心進行加工,只選取一個定位面,保證各軸的同軸度,減小齒側間隙與嚙合誤差;由于作動器處于中低速運動,且圓柱直齒齒輪之間徑向載荷與沖擊較小,因此齒輪受載變形量很小。該作動器的響應速度較好。
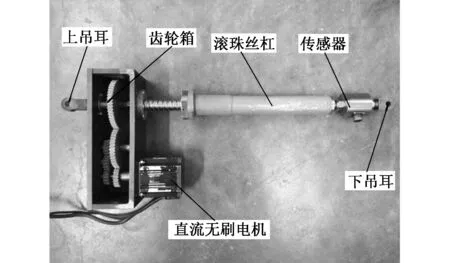
圖3 作動器樣機Fig.3 The actuator prototype
2 滾珠絲杠作動器數學模型的建立
2.1 作動器力學模型
作動器傳動部件較多,傳動較復雜,其中滾珠絲杠的運動副摩擦和齒輪之間的摩擦會對傳動效率有較大影響,因此需要重點考慮。
根據所選用滾珠絲杠的參數,滾珠絲杠的螺紋升角

(1)
由于滾珠絲杠副中滾珠螺母與螺紋滾道為滾動摩擦,且有潤滑油潤滑,因此滾珠絲杠結構的一個重要特點就是傳動效率較高。該作動器中滾珠絲杠副的傳動效率
(2)
式中,ρ為當量摩擦角,在此取ρ=0.2°。
作動器齒輪箱中有6個圓柱直齒齒輪,在作動器壓縮與伸張行程中均參與傳動,因此齒輪箱的傳動效率
(3)
式中,ηc為圓柱直齒齒輪傳動效率,在此取ηc=0.98。
本作動器中齒輪箱輸出軸與電機軸采用梅花聯軸器用花鍵連接,其傳動效率η3=0.99。
作動器總傳動效率
η=η1η2η3=85.2%
(4)
作動器阻尼力
(5)
式中,KT為電機的電磁轉矩系數;v1為作動器輸入端速度;v2為作動器輸出端速度。
阻尼系數
(6)
2.2 作動器饋能模型
滾珠絲杠作動器在伸張行程與壓縮行程具有不同傳動比,因此需要單獨分析。伸張行程饋能電壓
(7)
(8)
式中,nS為伸張行程齒輪箱傳動比;ke為反電動勢系數。
壓縮行程饋能電壓
(9)
(10)
式中,nY為壓縮行程齒輪箱傳動比。
在一個完整的壓縮與伸張行程中,滾珠絲杠式半主動懸架總的饋能電壓
(11)
當作動器收到路面不平度輸入時,作動器提供阻尼力對振動進行衰減,電機做功

(12)
部分振動能量還會通過阻尼器轉換成熱量耗散掉,其做功
(13)
當Fp(v2-v1)>0時,即作動器輸出力方向與作動器運動速度方向相反時,作動器處于半主動作用模式,此時作動器消耗的能量
(14)
當Fp(v2-v1)<0時,即作動器輸出力方向與作動器運動速度方向相同時,作動器處于被動饋能狀態,此時不需要作動器輸出半主動阻尼力,因此作動器可回收的能量
(15)
式中,I為電流。
可得到作動器饋能效率
(16)
3 滾珠絲杠作動器特性仿真分析
3.1 阻尼力特性
利用MATLAB/Simulink軟件對滾珠絲杠作動器進行阻尼力仿真,在1 Hz振動頻率下進行不同振幅A的被動阻尼力仿真,結果如圖4所示。在10 mm振幅下進行不同頻率f的被動阻尼力仿真,其結果如圖5所示。在1 Hz、10 mm正弦振動下,不同外接負載時作動器阻尼力如圖6所示。
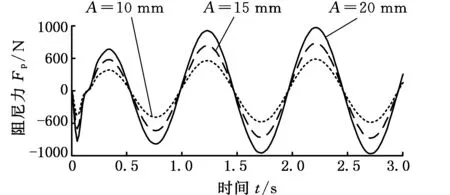
圖4 1 Hz頻率下不同振幅的作動器阻尼力Fig.4 The actuator damping force of different amplitude under 1 Hz frequency
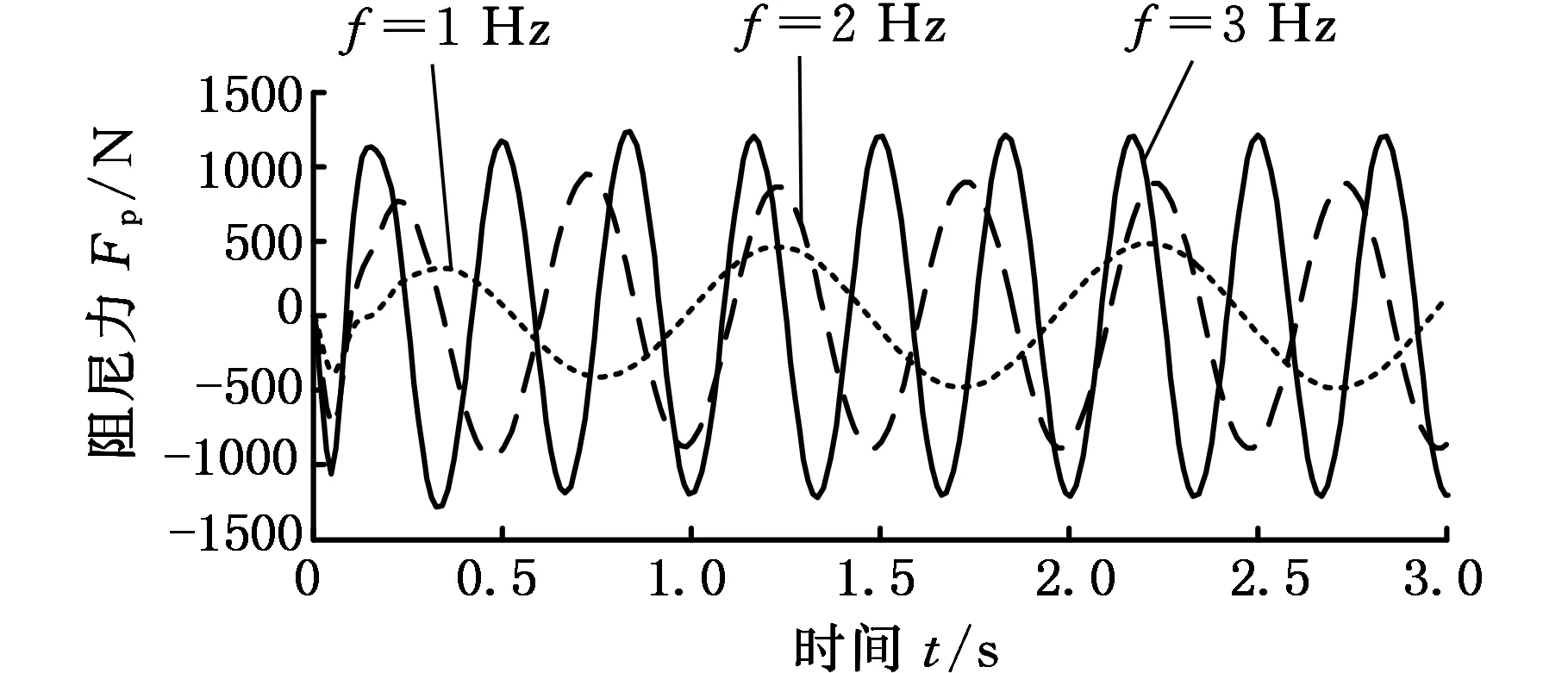
圖5 10 mm振幅下不同頻率的作動器阻尼力Fig.5 The actuator damping force of different frequency under 10 mm amplitude
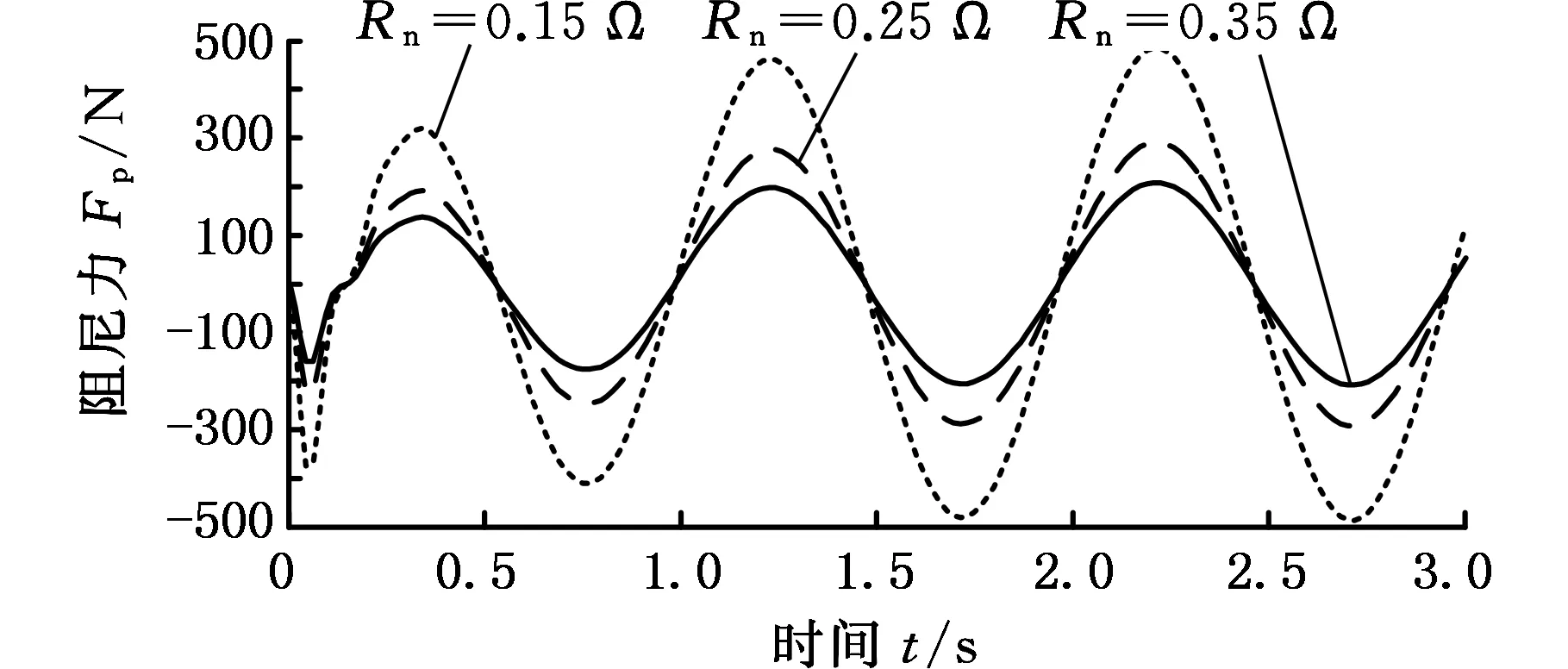
圖6 不同外接電阻時的作動器阻尼力Fig.6 The actuator damping force of different resistance
滾珠絲杠作動器的被動阻尼力仿真結果表明,隨著振幅與頻率的增大,懸架運動的最大速度也隨之增大,作動器阻尼力也隨之增大,作動器對振動的衰減能力增強,在低頻振動下可以產生的阻尼力為0~1200 N,因此本作動器衰減振動的能力良好。
3.2 饋能特性
利用MATLAB/Simulink軟件對滾珠絲杠作動器進行饋能仿真。1 Hz振動頻率下不同振幅的饋能仿真結果如圖7和圖8所示;10 mm振幅下不同頻率的饋能仿真結果如圖9和圖10所示。
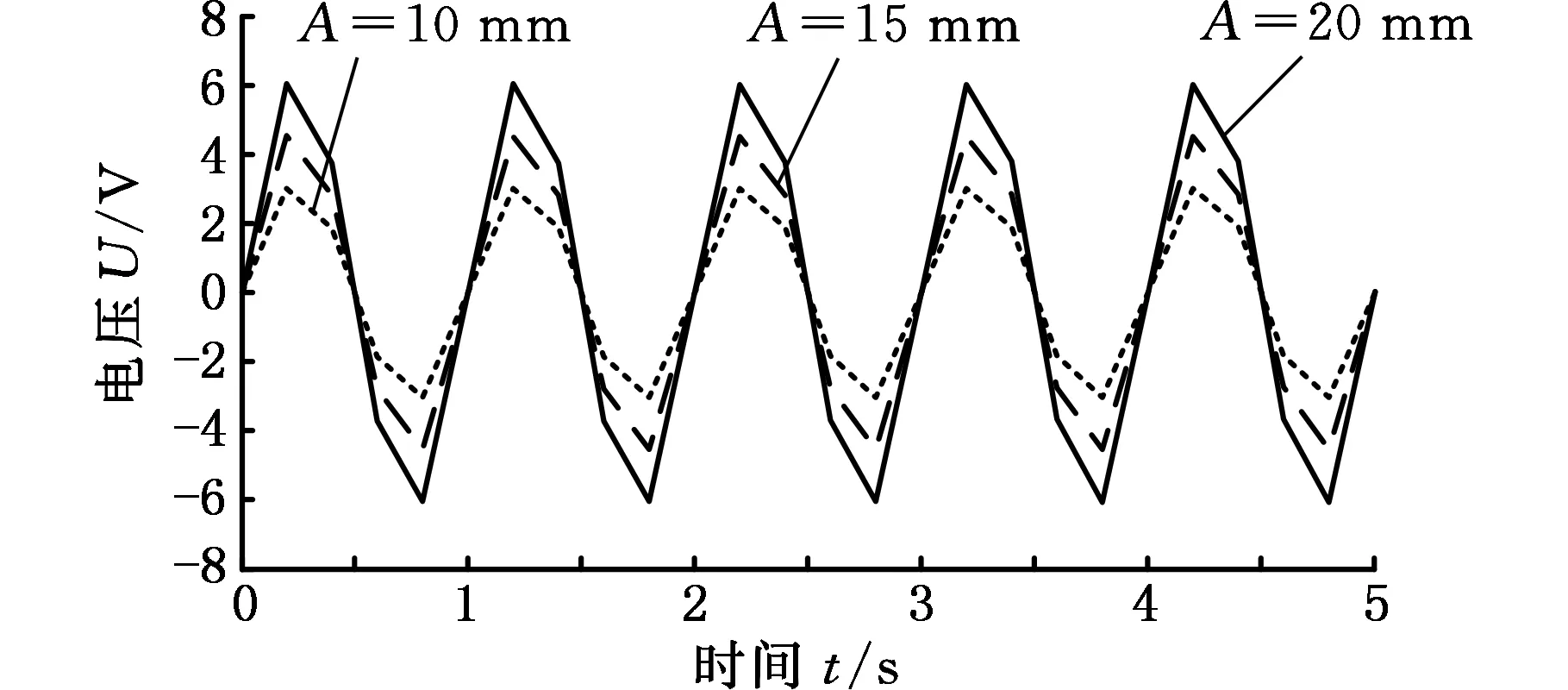
圖7 1 Hz頻率下不同振幅的饋能電壓Fig.7 The energy recovery voltage of different amplitude under 1 Hz frequency
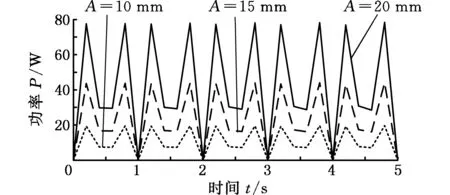
圖8 1 Hz頻率下不同振幅的饋能功率Fig.8 The energy recovery power of different amplitude under 1 Hz frequency
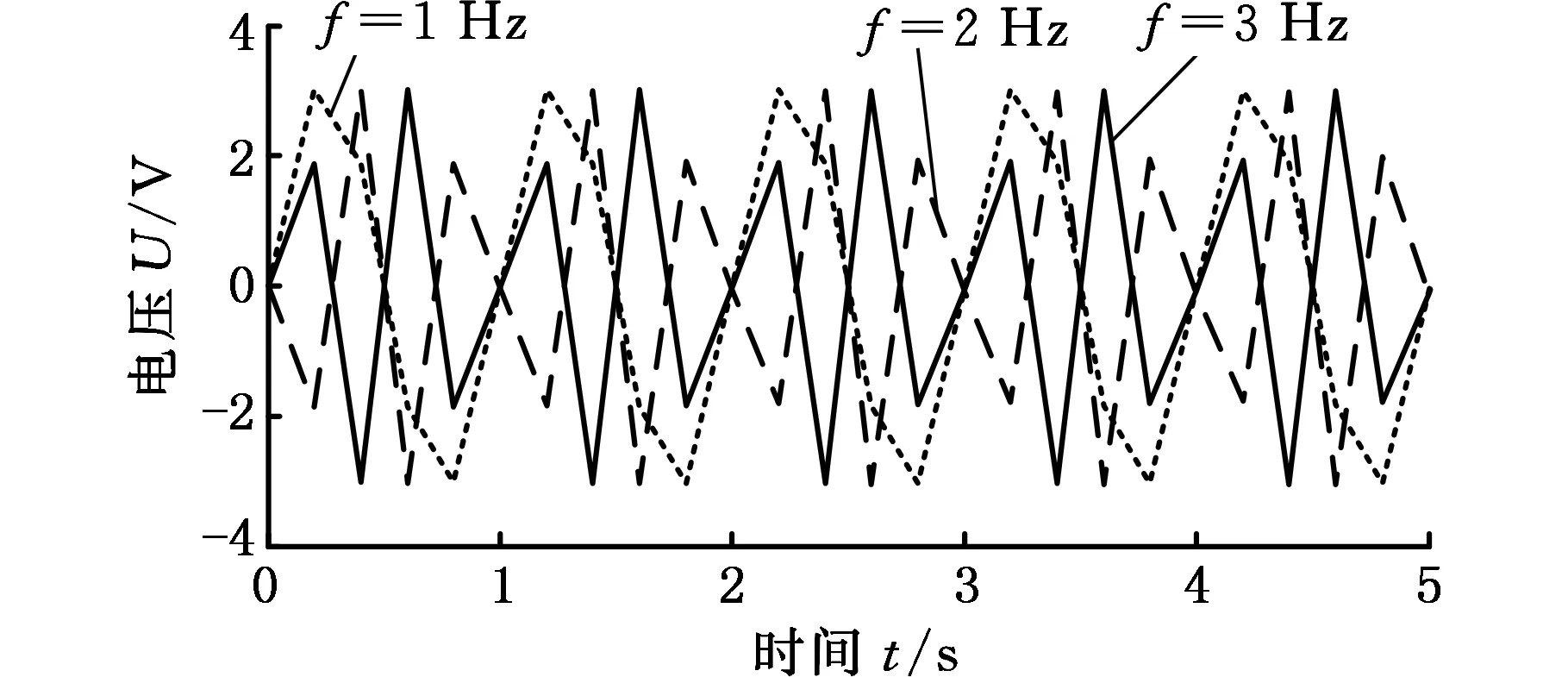
圖9 10 mm振幅下不同頻率的饋能電壓Fig.9 The energy recovery voltage of different frequency under 10 mm amplitude
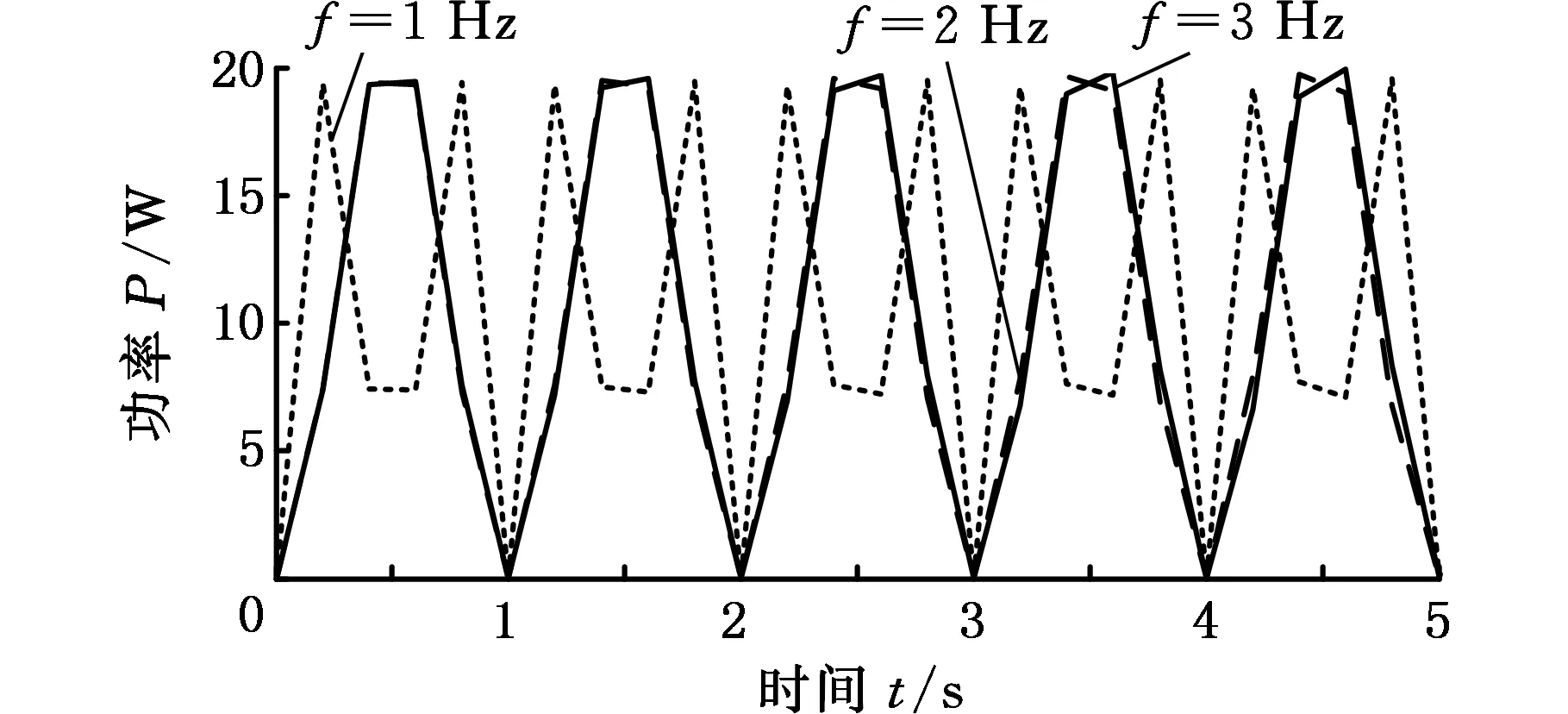
圖10 10 mm振幅下不同頻率的饋能功率Fig.10 The energy recovery power of different frequency under 10 mm amplitude
滾珠絲杠作動器的饋能仿真結果表明,在1~3 Hz振動頻率、10~20 mm的振動幅度下,振幅對饋能電壓與饋能功率的影響較大,在不外接升壓放大電路的情況下,滾珠絲杠作動器在低頻振動下可以產生的電壓為0~6 V,產生的饋能功率為0~80 W。
滾珠絲杠作動器的饋能效率分析如圖11和圖12所示。
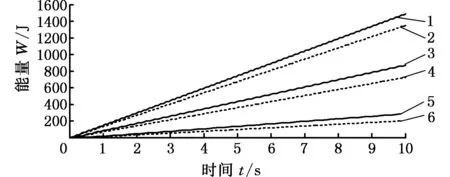
1.f=3 Hz時耗散的能量 2.f=3 Hz時回收的能量 3.f=2 Hz時耗散的能量 4.f=2 Hz時回收的能量 5.f=1 Hz時耗散的能量 6.f=1 Hz時回收的能量圖11 10 mm振幅不同頻率下作動器饋能情況Fig.11 The energy recovery situation of different frequency under 10 mm amplitude
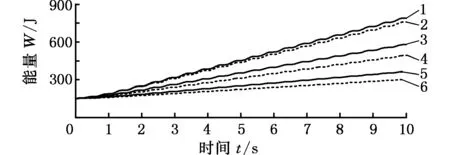
1.A=20 mm時耗散的能量 2.A=20 mm時回收的能量 3.A=15 mm時耗散的能量 4.A=15 mm時回收的能量 5.A=10 mm時耗散的能量 6.A=10 mm時回收的能量圖12 1 Hz頻率不同振幅下作動器饋能情況Fig.12 The energy recovery situation of different amplitude under 1 Hz frequency
根據圖11、圖12所示的作動器饋能情況,根據式(16)可以計算出作動器的饋能效率,如表1、表2所示。

表1 10 mm振幅不同頻率下饋能效率Tab.1 The energy recovery efficiency of different frequency under 10 mm amplitude

表2 1 Hz頻率不同振幅下饋能效率Tab.2 The energy recovery efficiency of different amplitude under 1 Hz frequency
滾珠絲杠作動器的饋能效率仿真結果表明,在振動頻率為1~3 Hz、振動幅度為10~20 mm時作動器的能量回收效率為41.61%~48.72%,且振動頻率與振幅越大,能量回收效率越高。
4 滾珠絲杠作動器特性試驗
4.1 直流無刷電機試驗
直流無刷電機的反電動勢系數ke和電磁轉矩系數KT對電機特性有很大影響,因此要得到滾珠絲杠作動器饋能特性與阻尼力特性,必須先得到其直流無刷電機的電動勢系數ke和電磁轉矩系數KT。本文采用試驗方法進行測定,主要設備有直流無刷電機、陪測電機、變頻器和聯軸器,試驗臺如圖13所示。
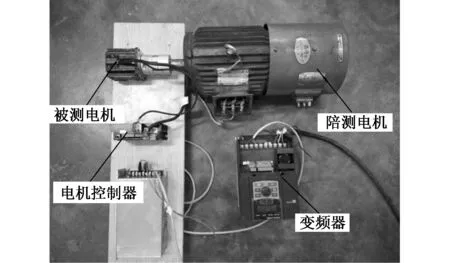
圖13 直流無刷電機饋能特性試驗Fig.13 Brushless dc motor energy recovery character test
被測電機為滾珠絲杠半主動作動器的直流無刷電機,額定電壓為48 V,額定功率為500 W。陪測電機為三相異步變頻電機,其額定電壓為380 V,額定功率為3 kW,額定轉速為2890 r/min。由于變頻器可以將頻率在電機外調節后再供給電機,因此可以對三相異步變頻電機進行無極調速。
通過調節變頻器的頻率可改變陪測電機的轉速,陪測電機與直流無刷電機使用花鍵通過梅花聯軸器進行連接,可同步轉動,因此就可以測得直流無刷電機在不同轉速下產生的反電動勢峰值。該直流無刷電機在不同轉速下反電動勢峰值的試驗擬合結果如圖14所示。
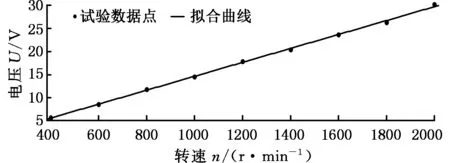
圖14 直流無刷電機反電動勢曲線Fig.14 Brushless DC motor counter electromotive force curve
根據圖14可計算出反電動勢曲線的斜率

(17)
式中,Vmax為被測電機反電動勢峰值,V;n為被測電機轉速,r/min。
根據反電動勢擬合曲線斜率,可以計算得到被測電機的反電動勢系數

(18)
則電機的電磁轉矩系數

(19)
4.2 滾珠絲杠作動器饋能特性試驗
滾珠絲杠作動器試驗系統如圖15所示,振動試驗臺下部可進行不同頻率與振幅的振動,上端固定。在振動試驗臺上,對滾珠絲杠作動器進行不同振幅與頻率的饋能試驗。
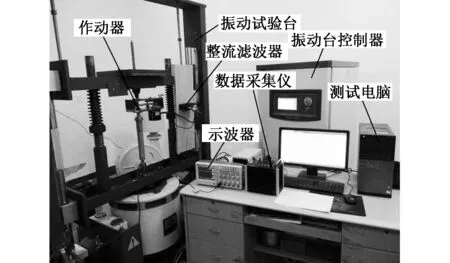
圖15 滾珠絲杠作動器饋能試驗系統Fig.15 Ball screw actuators energy recovery test system
饋能電壓經過整流器整流濾波以后,通過示波器與數據采集儀進行采集,試驗結果如圖16和圖17所示。
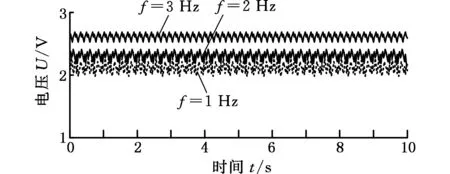
圖16 10 mm振幅下不同頻率的饋能電壓Fig.16 The energy recovery voltage of different frequency under 10 mm amplitude
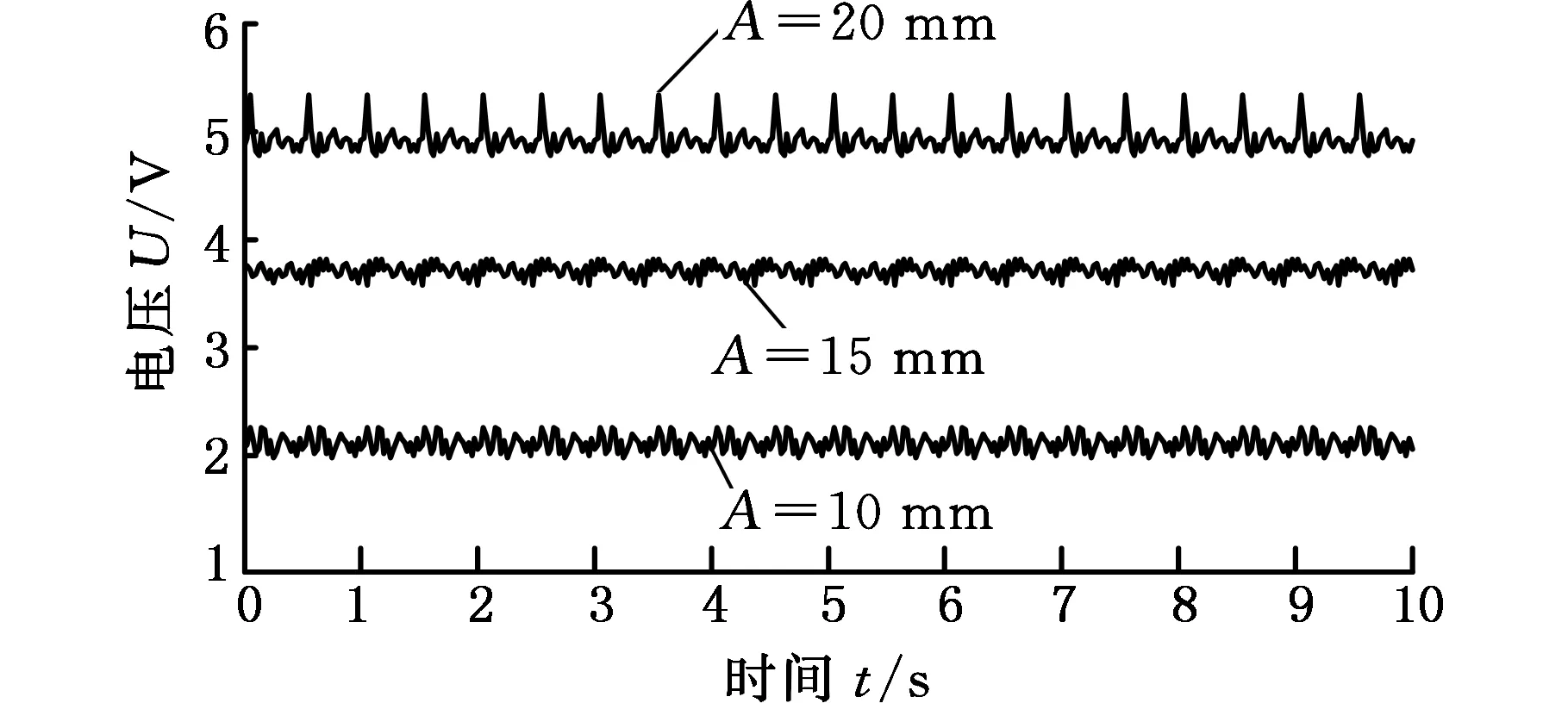
圖17 1 Hz頻率下不同振幅的饋能電壓Fig.17 The energy recovery voltage of different amplitude under 1 Hz frequency
由于在MATLAB/Simulink仿真模型中未加入整流濾波器的模型,因此試驗結果與仿真圖形不一致,但結果相近。
由圖16、圖17可以看出,在振動試驗臺上進行的滾珠絲杠作動器饋能試驗,進一步驗證了本結構作動器的饋能可行性。在試驗中受到一些實際的干擾因素影響后,其饋能電壓較仿真結果低,進行整流與濾波之后,在低頻振動下饋能電壓為2~5 V,本試驗為后續的能量回收與能量管理研究奠定了基礎。
5 結論
(1)提出了一種并聯式滾珠絲杠半主動懸架作動器。該作動器可以將路面不平度引起的車輪上下振動,通過滾珠絲杠機構和并聯的齒輪箱結構轉化為直流無刷電機的單向轉動,將懸架的振動能量轉化為電能進行回收利用。
(2)建立了作動器的數學模型,利用Simulink對作動器進行了作動器阻尼力仿真與作動器饋能特性仿真。仿真結果表明,作動器阻尼力為0~1200 N,且隨著懸架運動速度的增大,作動器阻尼力也隨之增大,作動器衰減振動的能力也隨之增大。作動器在低頻振動下可以產生的饋能電壓為0~6 V,饋能功率為0~80 W,饋能效率為41.61%~48.72%,且隨著振動頻率與振幅的增加而提高。
(3)在參數優化的基礎上,進行了作動器物理樣機的試制,并利用現有的振動試驗臺進行了作動器饋能特性試驗,試驗結果表明其在低頻振動下可產生的電壓為2~5 V。
[1] ZOU Zhouyue, CAO Junyi, CAO Binggang, et al. Evaluation Strategy of Regenerative Braking Energy for Super Capacitor Vehicle [J]. ISA Transactions,2015,55(3):234-240.
[2] WAJDI S A, MOHAMED H S, YUZITA Y. Advances in the Control of Mechatronic Suspension Systems[J]. Journal of Zhejiang University Science C-computers & Electronics,2014,15(10):848-860.
[3] CHEN S A, LI X, ZHAO L J, et al. Development of a Control Method for an Electromagnetic Semi-active Suspension Reclaiming Energy with Varying Charge Voltage in Steps[J]. International Journal of Automotive Technology,2015,16(5):765-773.
[4] 宋曉琳, 于德介, 李碧軍. 基于ADAMS的汽車主動懸架虛擬實驗臺的設計[J]. 中國機械工程,2009,18(2):248-251. SONG Xiaolin,YU Dejie,LI Bijun. A Virtual Experimental Bench Based on ADAMS for Active Suspension of Automobile[J].China Mechanical Engineering,2009,18(2):248-251.
[5] 王大勇, 王慧. 基于變論域模糊控制的車輛半主動懸架控制方法[J]. 中國機械工程,2017,28(3):366-372. WANG Dayong,WANG Hui.Control Method of Vehicle Semi Active Suspensions Based on Variable Universe Fuzzy Control[J].China Mechanical Engineering,2017,28(3):366-372.
[6] 黃昆, 喻凡, 張勇超. 基于能量流動分析的電磁式饋能型主動懸架控制[J].上海交通大學學報,2011,45(7):1068-1073. HUANG Kun,YU Fan, ZHANG Yongchao. Active Control of Energy-regenerative Electromagnetic Suspension Based on Energy Flow Analysis[J].Journal of Shanghai Jiaotong University,2011,45(7):1068-1073.
[7] 宋作軍. 汽車半主動懸架的非線性動力學分析[J]. 中國機械工程,2016,27(20):2835-2839. SONG Zuojun. Nonlinear Dynamics Analysis of Car Semi-active Suspensions[J].China Mechanical Engineering,2016,27(20):2835-2839.
[8] 于長淼. 雙超越離合器式電磁饋能阻尼器的研究[D]. 長春:吉林大學,2012. YU Changmiao. Study on Dual-overrunning Clutches Electro-mechanical Regenerative Damper Concept[D]. Changchun:Jilin University,2012.
[9] 田雪, 孫曉幫, 王天利,等. 減振器能量耗散研究綜述[J]. 汽車零部件,2016(9):77-81. TIAN Xue, SUN Xiaobang, WANG Tianli, et al. Review on Energy Dissipation of Shock Absorber[J].Automobile Parts,2016(9):77-81.
[10] 寇發榮, 范養強, 張傳偉,等. 車輛電動靜液壓作動器的半主動懸架時滯補償控制[J]. 中國機械工程,2016,27(15):2111-2117. KOU Farong, FAN Yangqiang, ZHANG Chuanwei,et al. Time Delay Compensation Control of Semi-active Suspension with Vehicle Electro-hydrostatic Actuator[J].China Mechanical Engineering,2016,27(15):2111-2117.
[11] 汪若塵, 謝健, 葉青,等. 直線電機式主動懸架建模與試驗研究[J]. 汽車工程,2016,38(4):495-499. WANG Ruochen, XIE Jian, YE Qing, et al. Modeling and Experimental Study of Active Suspension with Linear Motor[J]. Automotive Engineering,2016,38(4):495-499.
[12] 汪若塵, 錢金剛, 施德華,等. 直線電機饋能懸架半主動控制特性的仿真分析[J].廣西大學學報(自然科學版), 2015, 40(5):1102-1108. WANG Ruochen, QIAN Jingang, SHI Dehua, et al. Simulational Analysis of Semi-active Control Characteristics of Energy-regenerative Suspension with Linear Motor[J].Journal of Guangxi University(Natural Science Edition),2015,40(5):1102-1108.
[13] 楊和利. 高效饋能半主動懸架設計與性能分析[J]. 西南交通大學學報,2012,47(5):855-860. YANG Heli. Design and Performance Analysis of Efficient Semi-active Energy-regenerative Suspension[J]. Journal of Southwest Jiaotong University,2012,47(5):855-860.
[14] 劉松山. 電磁饋能懸架阻尼特性研究[D]. 長春:吉林大學,2013. LIU Songshan. Research on Damping Characteristics of Electromagnetic Regenerative Suspension [D]. Changchun:Jilin University,2013.
[15] 陳龍, 汪佳佳, 汪若塵,等. 基于能量優化的混合饋能懸架阻尼優化設計[J]. 農業機械學報,2016,47(8):305-310. CHEN Long,WANG Jiajia,WANG Ruochen,et al. Damping Optimization Design of Hybrid Energy Regenerative Suspension System Based on Energy Optimization[J].Transactions of the Chinese Society for Agricultural Machinery,2016,47(8):305-310.
(編輯袁興玲)
ResearchonaParallelTypeSemi-activeSuspensionActuator
KOU Farong LIANG Jin WEI Dongdong WANG Xing TIAN Lei
College of Mechanical Engineering, Xi’an University of Science and Technology, Xi’an,710054
U463.33;TH132.1
10.3969/j.issn.1004-132X.2017.19.008
2017-03-30
國家自然科學基金資助項目(51775426,51275403);陜西省教育廳服務地方專項計劃資助項目(17JF017);西安市科技計劃資助項目(2017079CG/RC042-XAKD007)
寇發榮,男,1973年生。西安科技大學機械工程學院教授。主要研究方向為車輛振動與主動控制。發表論文40余篇。E-mail:342546738@qq.com。梁津,男,1993年生。西安科技大學機械工程學院碩士研究生。魏冬冬,男,1991年生。西安科技大學機械工程學院碩士研究生。王星,女,1982年生。西安科技大學機械工程學院講師。田蕾,女,1996年生。西安科技大學機械工程學院碩士研究生。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00