一種自動(dòng)檢測(cè)靶板角點(diǎn)的方法
2017-10-18 02:59:04閆娜景文博崔燦王曉曼
閆娜,景文博,崔燦,王曉曼
(1.長(zhǎng)春理工大學(xué) 電子信息工程學(xué)院,長(zhǎng)春 130022;2.長(zhǎng)春理工大學(xué) 光電工程學(xué)院,長(zhǎng)春 130022)
一種自動(dòng)檢測(cè)靶板角點(diǎn)的方法
閆娜1,景文博2,崔燦1,王曉曼1
(1.長(zhǎng)春理工大學(xué) 電子信息工程學(xué)院,長(zhǎng)春 130022;2.長(zhǎng)春理工大學(xué) 光電工程學(xué)院,長(zhǎng)春 130022)
靶板是立靶調(diào)炮速度測(cè)量系統(tǒng)的重要組成部分,針對(duì)傳統(tǒng)的角點(diǎn)檢測(cè)算法不能自動(dòng)檢測(cè)靶板角點(diǎn)的問(wèn)題,提出了一種基于圖像處理技術(shù)的靶板角點(diǎn)的檢測(cè)方法。對(duì)CCD采集的靶板圖像進(jìn)行自適應(yīng)平滑濾波提高圖像信噪比,達(dá)到去除噪聲和細(xì)節(jié)增強(qiáng)的目的,采用迭代式閾值分割算法分割靶板,通過(guò)形態(tài)學(xué)運(yùn)算對(duì)分割后的像素點(diǎn)進(jìn)行填充,利用連通域分析和鏈碼法提取目標(biāo)區(qū)域輪廓,利用多邊形逼近算法對(duì)靶板輪廓進(jìn)行逼近,利用逼近結(jié)果檢測(cè)靶板角點(diǎn)。在CCD分辨率1280×1024,像元尺寸14μm,焦距50mm,測(cè)量距離5m的情況下,檢測(cè)精度小于1.4mm,在立靶調(diào)炮速度測(cè)量中具有重要應(yīng)用價(jià)值。
靶板角點(diǎn);圖像處理;輪廓提取;多邊形逼近
隨著科技的不斷發(fā)展,武器裝備日新月異,對(duì)武器系統(tǒng)中調(diào)炮速度的測(cè)量方法研究,越來(lái)越受到關(guān)注。由于在實(shí)際測(cè)量過(guò)程中,不可避免地會(huì)造成靶板有一定的傾斜,需要對(duì)拍攝的靶板圖像進(jìn)行圖像畸變校正。而基于透視點(diǎn)的圖像畸變校正,需要在圖像上尋找四個(gè)特征點(diǎn)計(jì)算變換矩陣,利用變換矩陣對(duì)靶板圖像進(jìn)行畸變校正。
實(shí)際調(diào)炮速度測(cè)量系統(tǒng)中,靶板由可升降支架、幕布組成,其中幕布有效區(qū)域?yàn)榘咨闹転楹谏尘埃x取有效區(qū)域的四個(gè)角點(diǎn)作為特征點(diǎn)進(jìn)行畸變校正。
目前,常用的角點(diǎn)檢測(cè)算法分為三類:(1)基于圖像邊緣信息的角點(diǎn)檢測(cè)算法[1],該算法存在的主要問(wèn)題是邊緣提取算法對(duì)角點(diǎn)檢測(cè)的影響極大,如果邊緣檢測(cè)有中斷部分,則會(huì)嚴(yán)重影響角點(diǎn)檢測(cè)結(jié)果;(2)基于圖像灰度信息的角點(diǎn)檢測(cè)算法[2],該算法是通過(guò)計(jì)算曲率和梯度來(lái)檢測(cè)角點(diǎn),該算法的優(yōu)點(diǎn)是避免了邊緣提取算法對(duì)角點(diǎn)檢測(cè)的影響,缺點(diǎn)是有時(shí)根據(jù)曲率和梯度求得的最大值點(diǎn)與角點(diǎn)的實(shí)際位置存在很大偏差,有時(shí)將實(shí)際的角點(diǎn)漏檢或者是將本來(lái)不是角點(diǎn)的干擾點(diǎn)誤當(dāng)成角點(diǎn);(3)基于小波變換的角點(diǎn)檢測(cè)算法[3],該算法的主要問(wèn)題是只有物體的特征尺度相似且先驗(yàn)知識(shí)已知時(shí),檢測(cè)算法的性能才比較好。針對(duì)以上三種檢測(cè)角點(diǎn)方法的不足,提出一種自動(dòng)檢測(cè)靶板角點(diǎn)坐標(biāo)的方法,該方法不用手動(dòng)選取靶板圖像角點(diǎn)坐標(biāo),沒(méi)有人為因素影響,檢測(cè)精度高。
1 透視變換角點(diǎn)檢測(cè)理論基礎(chǔ)
圖像法測(cè)量調(diào)炮速度的過(guò)程中,相機(jī)所獲取的圖像往往存在透視畸變,如圖1(a)所示,這使得光斑在圖像中的位置和實(shí)際位置不符,如圖1(b),影響測(cè)量精度。透視變換[4]的目的是根據(jù)公式(1)將圖像投影到一個(gè)新的平面如圖1(c),以消除透視畸變。
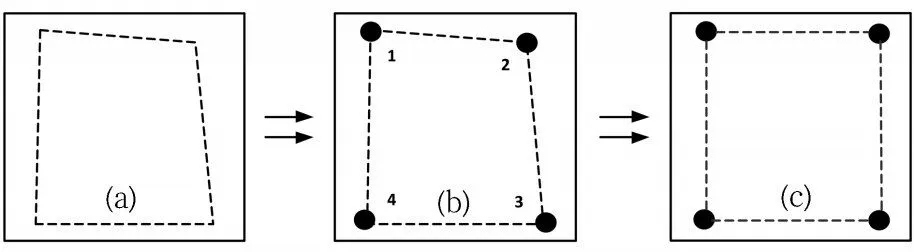
圖1 角點(diǎn)檢測(cè)示意圖
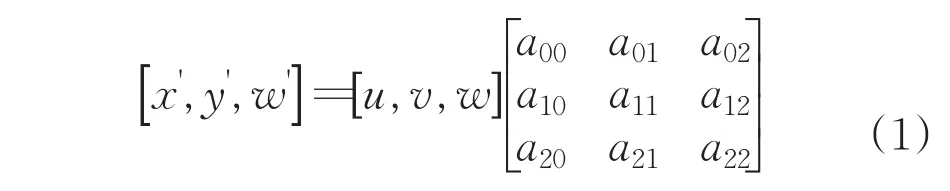
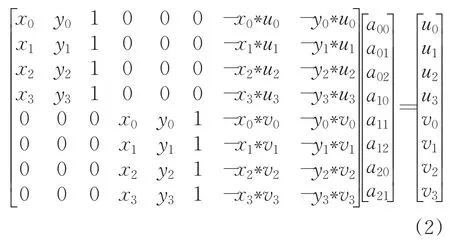
變換矩陣由式(2)求得,8個(gè)未知參數(shù)對(duì)應(yīng)8個(gè)方程,需要獲取4個(gè)特征點(diǎn)(u,v)以及變換后的4個(gè)點(diǎn)(x,y)來(lái)求解變換矩陣。為了保證經(jīng)過(guò)畸變校正后的圖像大小和實(shí)際靶板對(duì)應(yīng)像素大小一致,以原始圖像中靶板的左上角點(diǎn)(u0,v0)為基準(zhǔn)點(diǎn),根據(jù)小孔成像原理計(jì)算靶板在圖像中的實(shí)際大小,可以得到理論上非畸變角點(diǎn)(x,y)。因此,獲取(u,v)四個(gè)點(diǎn)對(duì)于求解變換矩陣具有重要意義。
2 靶板角點(diǎn)檢測(cè)圖像處理算法及實(shí)現(xiàn)
2.1 自適應(yīng)平滑濾波
實(shí)際靶板圖像中存在噪聲,需要對(duì)圖像進(jìn)行濾波處理以消除圖像背景及系統(tǒng)噪聲的干擾,為后續(xù)圖像分析處理奠定基礎(chǔ)。
為了消除靶板圖像中的噪聲,同時(shí)又增加邊緣細(xì)節(jié),采用自適應(yīng)平滑濾波方法對(duì)靶板圖像進(jìn)行濾波。該算法根據(jù)靶板圖像中像素灰度值的突變特性,自適應(yīng)改變?yōu)V波器的權(quán)值。主要步驟為:
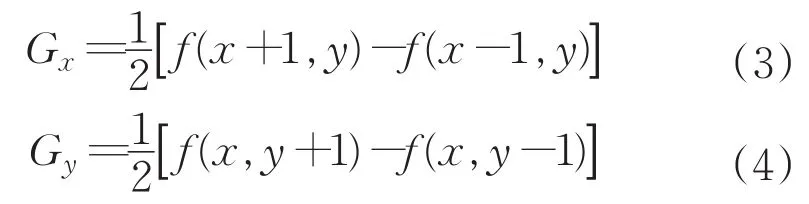
計(jì)算Gx,Gy:
計(jì)算權(quán)值系數(shù):

其中,h為幅度系數(shù),

平滑濾波:
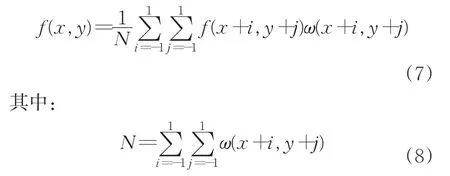
自適應(yīng)平滑濾波通過(guò)計(jì)算圖像梯度,對(duì)邊緣進(jìn)行銳化增強(qiáng)。利用權(quán)值系數(shù)調(diào)控濾波函數(shù)[5],達(dá)到平滑去噪的目的。靶板圖像原圖如圖2(a)所示,經(jīng)過(guò)自適應(yīng)平滑濾波處理后如圖2(b)所示。
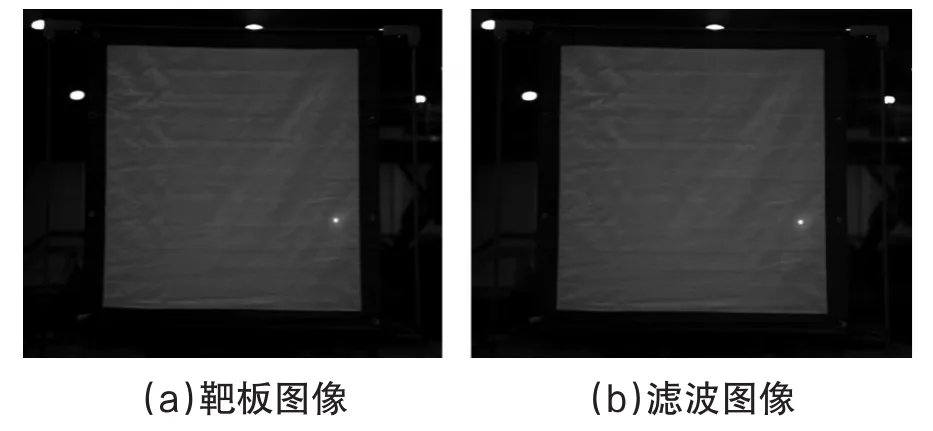
圖2 靶板圖像及濾波后圖像
2.2 閾值分割
待檢測(cè)靶板圖像的白色有效區(qū)域與外圍為黑色背景對(duì)比度較大邊界清晰,靶板圖像直方圖波谷明顯,故采用迭代式閾值分割算法分割靶板圖像[6]。靶板圖像經(jīng)過(guò)迭代式閾值分割結(jié)果如圖3所示。具體閾值分割步驟如下:
設(shè)置閾值T。將圖像的平均灰度值設(shè)為初始閾值;
將圖像分為兩組C1和C2。計(jì)算兩組的平均灰度值m1和m2,取兩個(gè)平均值的均值作為新閾值Tnew;
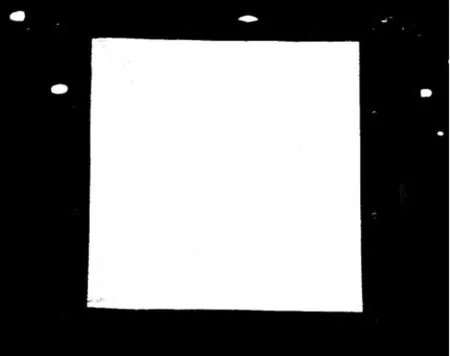
圖3 迭代式閾值分割圖像
2.3 膨脹
經(jīng)過(guò)閾值分割后的靶板圖像部分有空洞情況,通過(guò)膨脹處理能夠?qū)⒖斩床糠诌B接起來(lái),避免了基于圖像邊緣角點(diǎn)檢測(cè)算法中邊緣中斷的缺點(diǎn),有利于進(jìn)行后續(xù)操作處理。
膨脹[7]是對(duì)二值化物體邊界點(diǎn)進(jìn)行擴(kuò)充。設(shè)X為目標(biāo)圖像,B為結(jié)構(gòu)元素,則目標(biāo)圖像X被結(jié)構(gòu)元素B膨脹的數(shù)學(xué)表達(dá)式為式(9):

其中,x表示集合平移的位移量,⊕是膨脹運(yùn)算的運(yùn)算符。BV是結(jié)構(gòu)元素B做關(guān)于其原點(diǎn)的反射得到反射集合。膨脹結(jié)果如圖4所示。
圖4 膨脹圖
2.4 提取目標(biāo)區(qū)域輪廓
2.4.1 連通域分析
靶板圖像中目標(biāo)區(qū)域?yàn)樽畲筮B通區(qū)域,但背景中存在其他干擾連通區(qū)域,需要對(duì)每個(gè)連通區(qū)域進(jìn)行提取分析,從而獲取最大連通區(qū)域。在四鄰域中使用Two-Pass法進(jìn)行連通域分析:
首先逐行掃描像素,檢測(cè)是否為前景,若不是繼續(xù)掃描。
判斷當(dāng)前點(diǎn)四鄰域中的左邊、上邊的像素是否為前景,若有一個(gè)則當(dāng)前點(diǎn)標(biāo)簽號(hào)與這個(gè)點(diǎn)相同。若有兩個(gè)則當(dāng)前點(diǎn)的標(biāo)簽號(hào)為較小點(diǎn)的一個(gè),并修改大標(biāo)簽號(hào)為小標(biāo)簽號(hào)。
第二次掃描,將具有相等關(guān)系的所標(biāo)記的像素歸為一個(gè)連通域,并合并為一個(gè)標(biāo)記。
完成連通域分析后,對(duì)每個(gè)連通區(qū)域進(jìn)行像素個(gè)數(shù)統(tǒng)計(jì),需找像素個(gè)數(shù)最大的連通區(qū)域作為最終查找到的目標(biāo)區(qū)域,并將其他干擾連通域像素值賦為背景。
2.4.2 輪廓提取
經(jīng)過(guò)上述算法能夠提取靶板圖像中有效目標(biāo)區(qū)域,為了對(duì)目標(biāo)區(qū)域進(jìn)一步處理,需要對(duì)目標(biāo)區(qū)域進(jìn)行輪廓跟蹤。
每個(gè)目標(biāo)輪廓都有走向,因此可采用鏈碼序列來(lái)描述目標(biāo)輪廓,鏈碼[8]方式描述輪廓需要記錄輪廓的起始點(diǎn)和輪廓上每一點(diǎn)相對(duì)于前一點(diǎn)的鏈碼值列表。相比于四鏈碼法,八鏈碼法可以更精確的表示一個(gè)輪廓,輪廓結(jié)果如圖5所示。
首先按照從左至右,從上至下的順序查找輪廓起點(diǎn);
再按照右、右下、下、左下的順序查找第二個(gè)輪廓點(diǎn);
然后按照右、右下、下、左下、左、左上、上、上右的順序查找其它輪廓點(diǎn),直到找到輪廓起點(diǎn)為止。
圖5 靶板輪廓圖
2.5 多邊形逼近
對(duì)獲取的靶板輪廓圖像進(jìn)行多邊形逼近,多邊形逼近原理如圖6所示,DP算法[9]基本思想:
從輪廓圖像上選擇兩個(gè)相距最遠(yuǎn)的點(diǎn),如圖6(b)所示;
將這兩個(gè)點(diǎn)連接成線段;
在輪廓上查找距離該線段的最遠(yuǎn)的點(diǎn),將該點(diǎn)添加到輪廓中,構(gòu)成新的輪廓,如圖6(c)所示;
算法不斷迭代,將新的點(diǎn)添加到輪廓中,如圖6(d)所示。
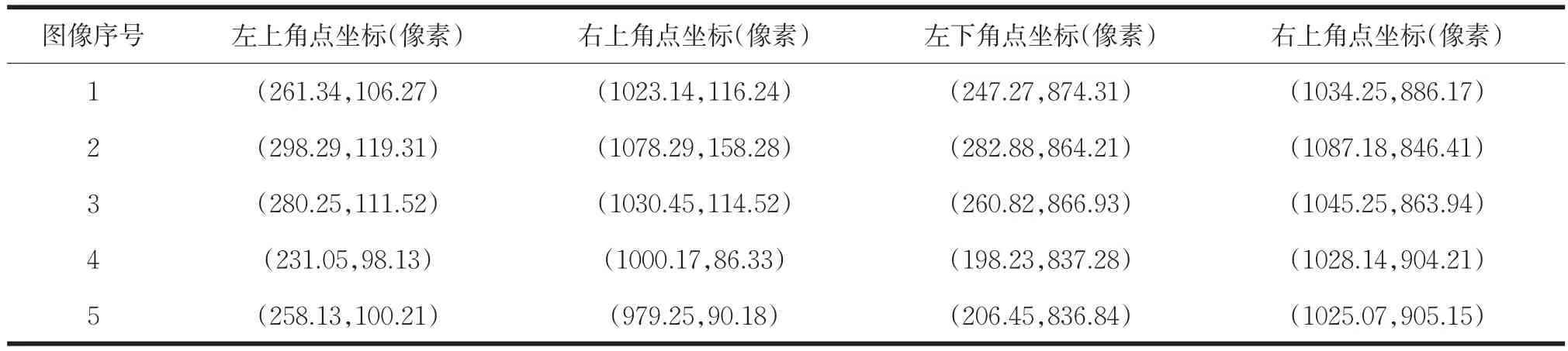
表1 5次測(cè)量靶板圖像4個(gè)角點(diǎn)在圖像中的定位
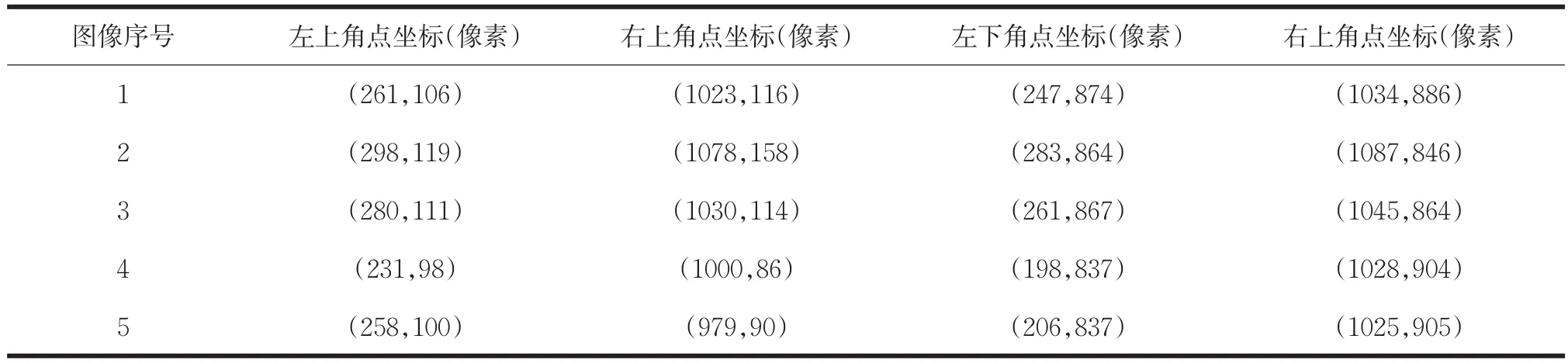
表2 對(duì)應(yīng)表1的5次測(cè)量靶板圖像4個(gè)角點(diǎn)的理論位置
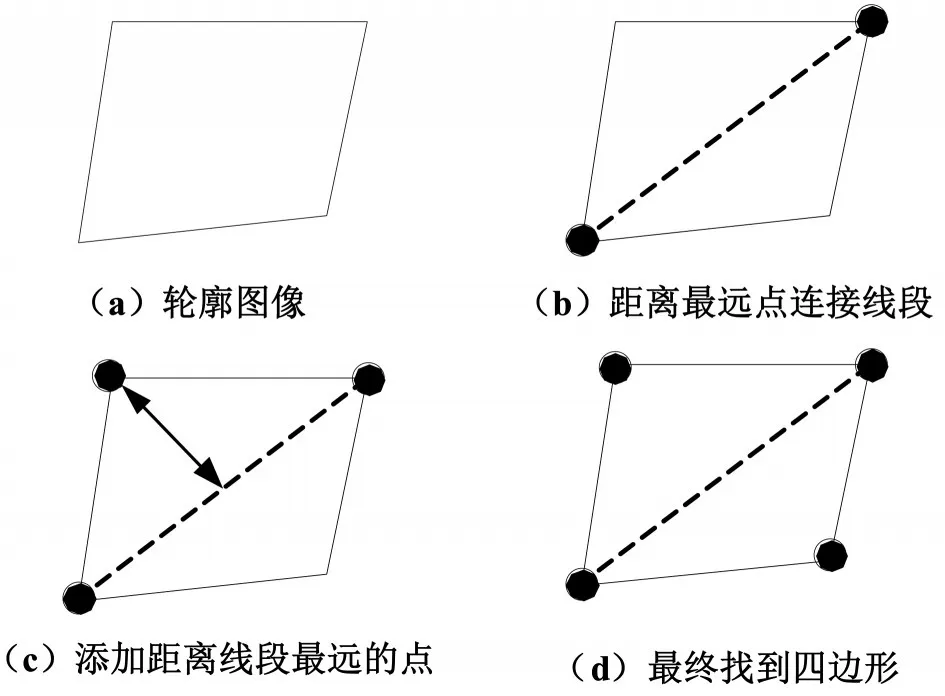
圖6 多邊形逼近原理圖
檢測(cè)多邊形的點(diǎn)數(shù)是否是4,如果為4則記錄四個(gè)頂點(diǎn)坐標(biāo)。為了獲得更加精確的坐標(biāo)點(diǎn),以頂點(diǎn)為中心在原始圖像中3x3區(qū)域內(nèi)求質(zhì)心,最后保存4邊形的四個(gè)頂點(diǎn)坐標(biāo)。多邊形逼近檢測(cè)靶板角點(diǎn)是通過(guò)整個(gè)靶板輪廓的幾何特征來(lái)確定的,受個(gè)別點(diǎn)的影響不大,能夠避免基于圖像灰度信息的角點(diǎn)檢測(cè)算法中漏檢或檢測(cè)不準(zhǔn)的缺點(diǎn)。相比于基于小波變換的角點(diǎn)檢測(cè)算法,多邊形逼近沒(méi)有特征尺度相似和已知先驗(yàn)條件的限制。
3 實(shí)驗(yàn)結(jié)果及精度分析
算法采用Visual Studio 2010 C++編寫,在win32系統(tǒng)中執(zhí)行。采用分辨率為1280×1024的CCD相機(jī)。根據(jù)本文自動(dòng)檢測(cè)靶板角點(diǎn)的方法,檢測(cè)結(jié)果如圖7所示。
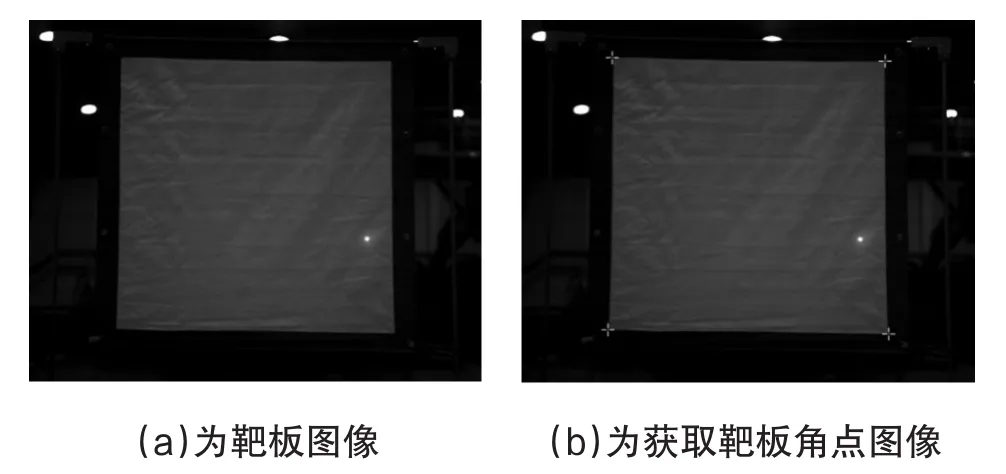
圖7 自動(dòng)獲取靶板角點(diǎn)效果圖
表1列出了5次測(cè)量靶板圖像4個(gè)角點(diǎn)在圖像中的定位。表2列出了對(duì)應(yīng)表1的5次測(cè)量靶板圖像4個(gè)角點(diǎn)的理論位置。
為了驗(yàn)證靶板角點(diǎn)識(shí)別的準(zhǔn)確性,將本文算法檢測(cè)出的角點(diǎn)x、y的坐標(biāo)與實(shí)際靶板角點(diǎn)的x、y進(jìn)行比較,圖8分別是靶板角點(diǎn)在x、y方向上與實(shí)際靶板角點(diǎn)的偏差絕對(duì)值。
根據(jù)誤差知識(shí)檢測(cè)該算法自動(dòng)獲取靶板角點(diǎn)坐標(biāo)的準(zhǔn)確性,靶板角點(diǎn)坐標(biāo)的精度計(jì)算公式如下:
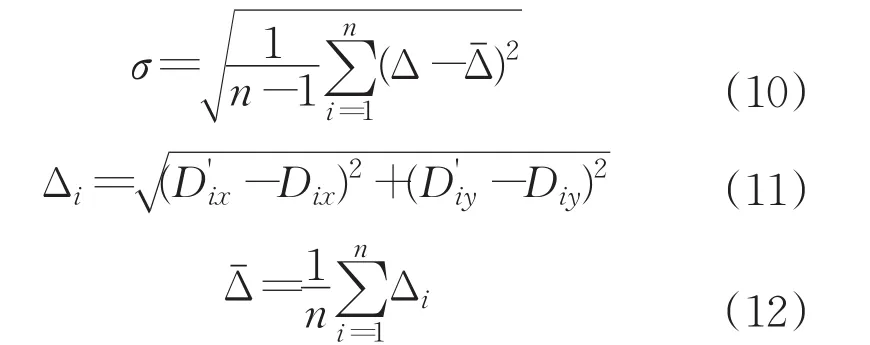
其中,σ是靶板角點(diǎn)坐標(biāo)的測(cè)量精度,Δi是第i幅靶板圖像角點(diǎn)與實(shí)際靶板角點(diǎn)的偏差是n次測(cè)量偏差的平均值,n為測(cè)量次數(shù),(Dix,Diy)是第i幅靶板角點(diǎn)坐標(biāo)在圖像中的定位是第i幅靶板角點(diǎn)坐標(biāo)在圖像中的理論位置。根據(jù)公式(10)、(11)、(12)對(duì)采集的所有數(shù)據(jù)進(jìn)行計(jì)算,測(cè)量精度結(jié)果如表3所示,靶板角點(diǎn)定位精度低于一個(gè)像素,滿足靶板角點(diǎn)定位精度要求。
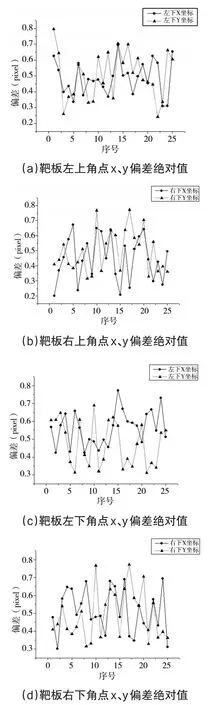
圖8 靶板角點(diǎn)在x、y方向上與實(shí)際靶板角點(diǎn)的偏差絕對(duì)值

表3 靶板角點(diǎn)測(cè)量精度
4 結(jié)論
本文提出自動(dòng)檢測(cè)靶板圖像角點(diǎn)的方法。提取靶板圖像的輪廓,通過(guò)多邊形逼近算法得到靶板圖像的逼近多邊形,準(zhǔn)確獲取靶板圖像角點(diǎn)。大量的實(shí)驗(yàn)結(jié)果分析表明,該方法避免了人為因素參與所帶來(lái)的隨機(jī)誤差影響,具有很高精度,在立靶調(diào)炮速度測(cè)量中發(fā)揮了重要的作用。
[1]Possa PR,Mahmoudi SA,Harb N,et al.A multi-resolution FPGA-based architecture for real-time edge and corner detection[J].IEEE Transactions on Computers,2014,63(10):2376-2388.
[2]Zhang S,Yang D,Huang S,et al.Corner detection using Chebyshev fitting-based continuous curvature estimation[J].Electronics Letters,2015,51(24):1988-1990.
[3]Zhou J,Cheng H.The simulation application of wavelet transform for harbor detection in map[C].International Conference on Intelligent Computation and Automation,2015:1033-1035.
[4]汪貴平,王會(huì)峰,劉盼芝,等.特征平行直線的成像畸變現(xiàn)場(chǎng)校正[J].光子學(xué)報(bào),2014,43(1):0111001-1-0111001-5.
[5]張紅梅,韓萬(wàn)剛.一種新的變步長(zhǎng)LMS自適應(yīng)濾波算法研究及其應(yīng)用[J].儀器儀表學(xué)報(bào),2015,36(8):1822-1830.
[6]Lei Shao,Yi Mu,Peng Guo.Research of image segmentation based on iterative thresgold[J].Applied Mechanics and Materials,2015(701):330-333.
[7]鄧仕超,黃寅.二值圖像膨脹腐蝕的快速算法[J].計(jì)算機(jī)工程與應(yīng)用,2017,53(5):207-211.
[8]王竟雪,宋偉東,趙麗科,等.改進(jìn)的Freeman鏈碼在邊緣跟蹤及直線提取中的應(yīng)用研究[J].信號(hào)處理,2014,30(4):422-430.
[9]吳東東,周東翔,關(guān)濤,等.一種基于輪廓多邊形逼近的可見(jiàn)光與紅外圖像配準(zhǔn)算法[J].計(jì)算機(jī)應(yīng)用與軟件,2012,29(10):28-30+122.
A Method of Automatically Detecting the Corner of a Target
YAN Na1,JING Wenbo2,CUI Can1,WANG Xiaoman1
(1.School of Electronics and Information Engineering,Changchun University of Science and Technology,Changchun 130022;2.School of Optoelectronic Engineering,Changchun University of Science and Technology,Changchun 130022)
The target is important part of vertical target speed measurement system,the traditional corner detection algorithm does not automatically detect the corner of the target question.Based on image processing technology corner of the target method is proposed.Adaptive smoothing filter is applied to the image acquired by CCD to improve the target image signal to noise ratio,to achieve the purpose of removing noise and detail enhancement.Using iterative threshold segmentation algorithms split target,the contour of the target is approximated by the polygon approximation algorithm,using approximation results detecting the corner of the target.In the case of CCD resolution is1280×1024,pixel size 14μm,focal length 50mm,measuring distance 5m,detection accuracy is less than 1.4mm,in the vertical target gun speed measurement field has important application value.
target corner;image processing;contour extraction;polygon approximation
TP391.41
A
1672-9870(2017)04-0073-05
2017-05-26
閆娜(1992-),女,碩士研究生,E-mail:814703394@qq.com
景文博(1980-),男,博士,副教授,E-mail:wenbojing@sina.
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
