農(nóng)機(jī)導(dǎo)航自校正模型控制方法探討
2017-10-18 04:58:40陳志學(xué)
時(shí)代農(nóng)機(jī) 2017年8期
陳志學(xué)
(杜集區(qū)農(nóng)林水利局,安徽杜集235000)
農(nóng)機(jī)導(dǎo)航自校正模型控制方法探討
陳志學(xué)
(杜集區(qū)農(nóng)林水利局,安徽杜集235000)
隨著科學(xué)技術(shù)的發(fā)展,農(nóng)業(yè)生產(chǎn)中科學(xué)技術(shù)應(yīng)用水平越來越高,農(nóng)業(yè)生產(chǎn)逐漸的朝著精準(zhǔn)農(nóng)業(yè)方向發(fā)展,農(nóng)業(yè)自動(dòng)導(dǎo)航作為精準(zhǔn)農(nóng)業(yè)生產(chǎn)技術(shù)體系發(fā)展中的重要構(gòu)成,對(duì)于農(nóng)業(yè)生產(chǎn)整個(gè)過程都有著積極地推動(dòng)作用,文章從運(yùn)動(dòng)學(xué)模型的角度對(duì)農(nóng)機(jī)導(dǎo)航自校正模型控制進(jìn)行了簡(jiǎn)要分析。
農(nóng)機(jī)導(dǎo)航;自校正模型;模型控制
1 農(nóng)業(yè)導(dǎo)航自校正模型控制構(gòu)成
農(nóng)業(yè)導(dǎo)航自校正模型屬于精準(zhǔn)農(nóng)業(yè)農(nóng)機(jī)自動(dòng)導(dǎo)航控制技術(shù)的一種特殊形式,目前來說對(duì)于精準(zhǔn)農(nóng)業(yè)自動(dòng)導(dǎo)航控制技術(shù)的要求不僅僅局限在控制方法的研究方面,有很多都已經(jīng)滲入到了對(duì)技術(shù)模型控制方法的方向。文章提出的農(nóng)機(jī)導(dǎo)航自校正模型首先從控制器的角度來看主要分為兩個(gè)環(huán)節(jié),分別是技術(shù)模型控制器以及自校正控制器,其中自校正控制器主要是用來設(shè)定農(nóng)機(jī)設(shè)備的位置,模型控制器主要設(shè)定農(nóng)機(jī)設(shè)備的航向,模型控制器是整個(gè)自校正模型的核心控制器,自校正控制器是自校正模型中的輔助設(shè)備,其控制思想一方面具備模型控制的先天優(yōu)勢(shì),另一方面可以降低不精確模型對(duì)控制質(zhì)量的影響,可以最大限度地提升農(nóng)機(jī)導(dǎo)航的精確性。
2 模型控制器設(shè)計(jì)
(1)農(nóng)機(jī)設(shè)備運(yùn)動(dòng)學(xué)模型。運(yùn)動(dòng)學(xué)模型的設(shè)計(jì)首先需要拋開農(nóng)機(jī)設(shè)備車輪和地面的摩擦作用、無側(cè)滑側(cè)傾作用,其次這種條件下就可以將相應(yīng)的農(nóng)機(jī)設(shè)備例如農(nóng)用拖拉機(jī)等四輪設(shè)備當(dāng)做是二輪模型來考慮,具體的模型如圖1所示,圖1中O是運(yùn)動(dòng)學(xué)模型控制點(diǎn),M是距離這個(gè)點(diǎn)最近的位置,以此為基礎(chǔ),同時(shí)結(jié)合幾何物力規(guī)律得出以下公式(1)模型微分方程:


圖1 農(nóng)機(jī)設(shè)備運(yùn)動(dòng)學(xué)模型
式(1)中,θ為農(nóng)機(jī)設(shè)備的航向偏差角度;X為M沿著曲線的橫坐標(biāo);l為農(nóng)機(jī)設(shè)備軸距;y為設(shè)備橫向偏差;V為設(shè)備縱向行駛的實(shí)際距離;c(x)為曲率。
(2)模型控制器控制律。根據(jù)這個(gè)模型再借助虛擬控制選擇具體的設(shè)備運(yùn)動(dòng)狀態(tài)變量可以得出控制器的二維空間狀態(tài)模型,如下所示:

再結(jié)合線性理論選擇具體的參數(shù)K=[k1k2],然后按照極點(diǎn)配置原則對(duì)設(shè)備狀態(tài)進(jìn)行反饋,最終來計(jì)算控制器零點(diǎn)逐漸穩(wěn)定的控制律,這個(gè)過程中可以對(duì)模型控制器系統(tǒng)穩(wěn)定性以及速度產(chǎn)生影響的是k1和k2比值,雙方成反比關(guān)系,k1和k2比值越大其控制器穩(wěn)定性越差,但是速度越快。
3 農(nóng)機(jī)設(shè)備自校正控制器設(shè)計(jì)
上面得出的結(jié)論可以看出在直線路徑以及小曲率的跟蹤過程中,模型控制器實(shí)際的跟蹤效果非常好,但是相反的對(duì)于大曲率情況來說,實(shí)際的跟蹤效果卻并不理想,所以對(duì)于模型控制器實(shí)際的控制效果評(píng)價(jià)還需要依靠效果監(jiān)測(cè)和預(yù)測(cè)吻合度來進(jìn)行,吻合度參數(shù)為sdy(控制器偏差變化趨勢(shì)變量),這個(gè)過程中需要獲取監(jiān)測(cè)時(shí)刻的橫向偏差數(shù)值以及一定監(jiān)測(cè)時(shí)間段內(nèi)的橫向偏差數(shù)值,對(duì)于時(shí)間段內(nèi)的偏差數(shù)值需要根據(jù)經(jīng)驗(yàn)來獲取,橫向偏差數(shù)值取值較小的情況下,設(shè)備自校正控制器會(huì)表現(xiàn)出較快的反應(yīng)速度,與此同時(shí)模型控制系統(tǒng)的整體穩(wěn)定性會(huì)下降,相反橫向偏差數(shù)值較大的情況下,反應(yīng)速度會(huì)下降,但是系統(tǒng)穩(wěn)定性會(huì)大幅度的提升,通過反復(fù)的偏差變化趨勢(shì)實(shí)驗(yàn),最終得出時(shí)間控制在1.2s的時(shí)候系統(tǒng)穩(wěn)定性和反應(yīng)速度的整體效果最佳。
(1)輸入變量和輸出變量的模糊化。這里設(shè)計(jì)的農(nóng)機(jī)設(shè)備自校正控制器一共有兩個(gè)輸入變量和一個(gè)輸出變量,輸入變量一個(gè)是上面提到的sdy(控制器偏差變化趨勢(shì)變量),另一個(gè)是y(橫向的偏差變量);輸出變量主要是農(nóng)機(jī)設(shè)備轉(zhuǎn)向輪期望的補(bǔ)償角度,兩個(gè)變量的模糊化過程就是利用數(shù)字來體現(xiàn)輸入變量模糊化序數(shù),根據(jù)橫向偏差、控制器偏差變化趨勢(shì)變量以及農(nóng)機(jī)設(shè)備轉(zhuǎn)向輪期望的補(bǔ)償角度量化等級(jí)以及量化因子取值將這三個(gè)變量的模糊化等級(jí)以及隸屬度函數(shù)用圖2來表示:
其中圖2中曲線分別表示三個(gè)變量的模糊等級(jí),分別為負(fù)大、負(fù)中、負(fù)小、零、正小、正中和正大。
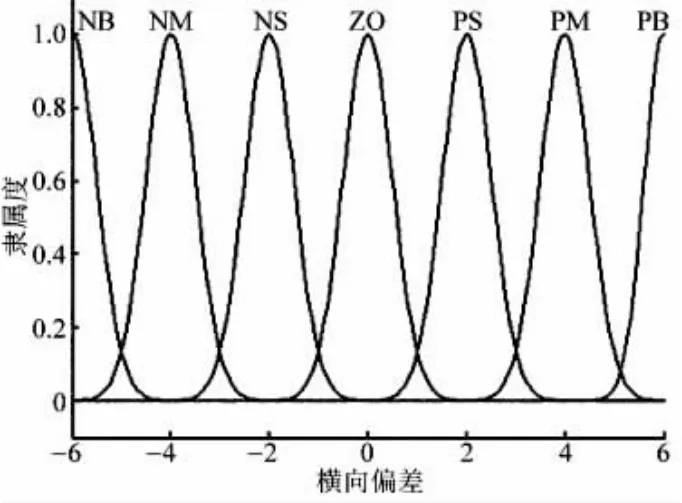
圖2 橫線偏差隸屬度函數(shù)
(2)自校正控制器控制規(guī)則。對(duì)于農(nóng)機(jī)設(shè)備自校正控制器的設(shè)計(jì)需要考慮到設(shè)備駕駛?cè)藛T的駕駛經(jīng)驗(yàn),具體的原則:根據(jù)偏差隸屬度函數(shù),當(dāng)實(shí)際的偏差絕對(duì)值比較大的情況下,控制量盡量減小偏差,當(dāng)實(shí)際的偏差絕對(duì)值較小的情況下,一方面要減小實(shí)際偏差,另一方面還要顧及到控制系統(tǒng)的穩(wěn)定性,當(dāng)橫向偏差絕對(duì)值變化情況不斷增加的時(shí)候,設(shè)備導(dǎo)航自校正控制器需要用設(shè)備轉(zhuǎn)向輪期望的補(bǔ)償角度來對(duì)模型控制實(shí)際輸出進(jìn)行控制校正,通過偏差校正讓農(nóng)機(jī)設(shè)備朝著橫向偏差較小的趨勢(shì)運(yùn)動(dòng),當(dāng)橫向偏差絕對(duì)值變化趨勢(shì)不斷減小的時(shí)候,這種情況下實(shí)際的控制效果和預(yù)期的控制效果基本上可以保持一致,所以設(shè)備自校正模型控制器輸出的量要相應(yīng)的使用小角度進(jìn)行調(diào)節(jié),當(dāng)然這種情況下也可以不調(diào)節(jié)控制器輸出。
根據(jù)圖2,當(dāng)農(nóng)機(jī)設(shè)備位于導(dǎo)航控制線右側(cè)的時(shí)候,橫向的偏差表示為NB,并且這種趨勢(shì)還會(huì)不斷增加,這種情況下顯示的控制效果和預(yù)期的效果偏差較大,所以設(shè)備打破校正控制器需要輸出PB(正大)最大的轉(zhuǎn)向期望補(bǔ)償角來對(duì)設(shè)備轉(zhuǎn)向輪期望轉(zhuǎn)角進(jìn)行校正,讓農(nóng)機(jī)設(shè)備開始朝著正確的導(dǎo)航方向移動(dòng),結(jié)合圖2將自校正控制器控制規(guī)格描述為:如果橫向偏差變量為負(fù)大,并且控制器偏差變化趨勢(shì)變量也為負(fù)大,那么農(nóng)機(jī)設(shè)備轉(zhuǎn)向輪期望的補(bǔ)償角度需要取正大。
總的來說,文章提出的農(nóng)機(jī)導(dǎo)航自校正模式控制方法是從曲線路徑跟蹤方面存在的諸多問題進(jìn)行入手,對(duì)模型控制器以及自校正控制器進(jìn)行設(shè)計(jì)研究,不僅可以提升導(dǎo)航的精確度和穩(wěn)定性,同時(shí)還可以減小不精確模型產(chǎn)生的不良影響。
[1]張聞?dòng)?基于雙切圓尋線模型的農(nóng)機(jī)導(dǎo)航控制方法[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2016,47(10):1-10.
[2]偉利國(guó).農(nóng)機(jī)導(dǎo)航多模變結(jié)構(gòu)智能控制方法研究[D].北京:中國(guó)農(nóng)業(yè)機(jī)械化科學(xué)研究院,2015.
[3]白曉平,劉曉光.農(nóng)機(jī)導(dǎo)航自校正模型控制方法研究[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2015,46(2):1-7.
陳志學(xué)(1973-),男,安徽淮北人,大學(xué)專科,工程師,主要研究方向:農(nóng)業(yè)機(jī)械化。
猜你喜歡
今日農(nóng)業(yè)(2022年1期)2022-11-16 21:20:05
今日農(nóng)業(yè)(2022年3期)2022-11-16 13:13:50
今日農(nóng)業(yè)(2022年2期)2022-11-16 12:29:47
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
中老年保健(2021年12期)2021-11-30 02:58:01
今日農(nóng)業(yè)(2021年14期)2021-11-25 23:57:29
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
電子制作(2018年11期)2018-08-04 03:26:08
中華詩(shī)詞(2018年11期)2018-03-26 06:41:34
Coco薇(2016年8期)2016-10-09 02:11:50

- 時(shí)代農(nóng)機(jī)的其它文章
- 微課在單片機(jī)課程實(shí)驗(yàn)中的應(yīng)用探索與實(shí)踐
- 基于SPOC教學(xué)模式的《汽車發(fā)動(dòng)機(jī)構(gòu)造與拆裝》課程教學(xué)設(shè)計(jì)研究與實(shí)踐
- 基于翻轉(zhuǎn)課堂的高職《機(jī)械基礎(chǔ)》課程教學(xué)模式實(shí)踐研究
- 高職院校英語課程中正確讀譯英文數(shù)字的BMT模式
- 多元化模糊理論在職業(yè)教育專業(yè)課程考核方式中的探討應(yīng)用
- 學(xué)生工作頁(yè)在模塊教學(xué)中的應(yīng)用實(shí)踐
——以《內(nèi)燃機(jī)車電氣動(dòng)作試驗(yàn)》為例