磁導航叉車式AGV軟件系統的設計
2017-10-19 09:23:44覃尚活林義忠楊中華邱永兵
裝備制造技術 2017年8期
覃尚活,林義忠,楊中華,邱永兵
(1.廣西大學機械工程學院,廣西 南寧530004;2.廣西農業機械研究院,廣西 南寧530007)
磁導航叉車式AGV軟件系統的設計
覃尚活1,林義忠1,楊中華2,邱永兵2
(1.廣西大學機械工程學院,廣西 南寧530004;2.廣西農業機械研究院,廣西 南寧530007)
本文簡單介紹磁導航叉車式AGV的總體結構,重點分析AGV的軟件系統。叉車式AGV有手動和自動兩種控制模式,手動控制模式通過手動控制手柄來控制AGV,自動控制模式通過主控制器發送控制信號來控制AGV,自動控制模式需要編寫復雜的自動控制程序,包括:AGV初始化程序、自動糾偏程序、叉貨程序、分岔路段程序等。
叉車式AGV;磁導航;自動糾偏;叉貨路徑規劃
0 引言
叉車式AGV作為一種自動導向物料搬運車,可以實現在無人駕駛的情況下,自動沿著預定的路線行駛,行駛過程中能自動避開障礙物或者自動停車報警,能有效過濾外部干擾,將貨物運送到指定地點。AGV作為一種高度自動化的物流設備,一方面降低了工人的勞動強度,另一方面也降低了企業的生產成本。當前國內勞動力成本不斷上升,自動化物流得到了越來越多的重視,在這樣的大背景下叉車式AGV得到了廣泛的應用。
1 磁導航叉車式AGV總體結構
磁導航叉車式AGV的總體布局如圖1所示,主要由貨叉、電瓶、驅動器和電機、手動控制手柄、控制柜等組成[1]。
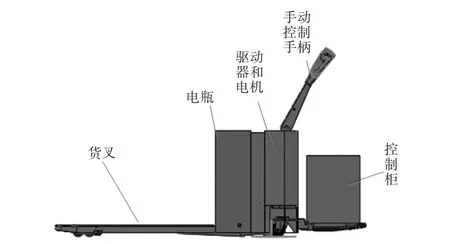
圖1 AGV總體布局
叉車式AGV一般有兩種底盤結構,一種是3輪底盤,另一種是5輪底盤,兩種底盤結構都是采用驅動和轉向集成一體的舵輪結構[2]。5輪底盤結構在舵輪左右兩邊增加兩個萬向輪,起到支撐、平衡、輔助轉向的作用,三輪結構在舵輪兩邊沒有萬向輪,全靠舵輪支撐和轉向。貨叉前部安裝有兩個自由輪,自由輪起到支撐貨叉、平衡整車的作用,但是自由輪只能前后滾動,不能左右轉向。叉車式AGV主要用來搬運貨物貨,電瓶為AGV提供電能,手動控制手柄用來手動操控AGV,控制柜主要放置主控制器和其他輔助器件。將控制柜放置在AGV尾部,一方面方便安裝和維護,另一方面也使得整體布局合理緊湊。
2 AGV軟件系統設計
磁導航叉車式AGV具有兩種控制方式[3]:一種是以磁條作為導引路徑的自動控制方式;另一種是沒有導引路徑的手動控制方式。手動控制方式下,通過開關按鈕和加速旋鈕實現前進、后退、貨叉上升、貨叉下降、鳴笛報警等功能,通過轉動控制手柄實現轉向,因此手動控制功能不需要編寫控制程序,只需要對控制電路進行設計。
自動控制方式下,需要編寫復雜的自動控制程序,一方面需根據磁傳感器檢測到的信號判斷AGV的位置和姿態,發出控制指令,另一方面還要根據安全傳感器檢測到的信號判斷是否繼續運行。自動控制方式需要編寫初始化程序、自動糾偏程序、安全保護程序、轉彎、叉貨程序和分岔路段程序等。控制系統構成如2圖所示。
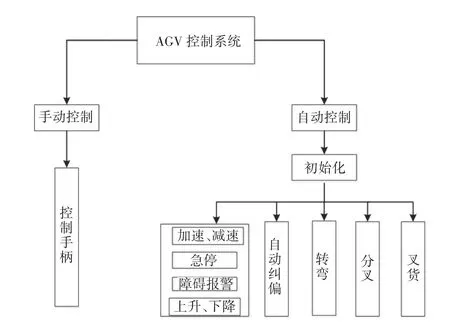
圖2 AGV控制系統構成
2.1 自動控制程序的設計
自動控制程序設計的總體思路是:通過鑰匙開關給AGV上電后,選擇自動控制模式,首先要對AGV進行解除互鎖、接通驅動控制器電源等,之后按下啟動按鈕,此時如果磁導航傳感器檢測不到磁條信號或者傳感器檢測到磁條信號但是車體不滿足啟動條件、安全傳感器檢測到運行方向上有障礙物等情況,AGV將不能啟動。當車體位置和障礙物符合啟動條件后,按下啟動按鈕方可正常啟動。啟動位置一般為直線位置,啟動之后為了調節車體的姿態,需要一段直行路線,直行路段范圍內,控制系統調用自動糾偏程序,即使磁條有小轉彎或者磁條貼成一段角度不是很大的斜線,AGV都能通過糾偏程序自動調整姿態,沿著預定軌跡行走。在啟動后任意時刻,只要檢測到前方有障礙物,AGV都會停車,直到障礙物移除后,才可再次行走。2.2 AGV初始化程序
叉車式AGV對安全性能要求比較高,因此需要設置較多的安全措施:一方面需要一個鑰匙開關來控制是否給AGV上電,另一方面在供電電路上要安裝一個急停開關,保證遇到緊急情況時能馬上停車。除了以上這些外,AGV的轉向驅動器和行走驅動器還應分別設置有安全保護電路。供電電路經過鑰匙開關、急停開關后,首先進入轉向驅動器,再由轉向驅動器向行走驅動器供電。如果轉向驅動器出現異常,比如檢測不到轉向信號、無法定位轉動方向等,轉向驅動器指示燈就會報警并且會斷開行走驅動器的供電電路,行走驅動器得不到電源,自然就無法啟動行駛。在手動控制下,轉向信號由轉向器發送給轉向電機,經研究轉向電機接受到的轉向信號為PWM波,根據PWM波占空比來確定轉向角度。因此在初始化的第一步就是要給轉向驅動器輸入PWM.占空比為50%的PWM波形如圖3所示。

圖3 PWM波形圖
控制程序輸出PWM波采用調用子程序的方法編寫,如圖4所示。初始化的第二步是將行走驅動控制器的電表、電源等輸入端接通,這時AGV就可以正常啟動,程序的初始化結束。
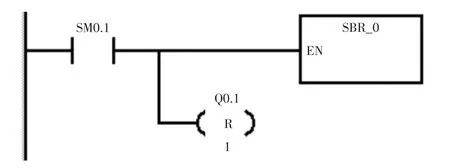
圖4 PWM波子程序
2.3 自動糾偏程序
自動糾偏程序是AGV軟件系統的核心,一個好的糾偏程序可以使AGV得以適應各種復雜的路徑,一個糾偏能力差的程序在面對復雜路徑時,將使得AGV不能自動糾正自己的位姿,導致車體偏離預定軌跡。本課題選擇的磁導航傳感器具有16個磁信號檢測點,安裝距離為離地面2 cm,選擇的磁條寬度為3 cm,在磁條豎直方向上,磁傳感器可以同時感應到4~5個磁信號[4],見圖5.

圖5 磁帶導引原理圖
為了確定AGV的位姿,將磁傳感器各個檢測點進行編號分類,H0到H15表示傳感器的16個檢測點,如果檢測點感應到磁場則該檢測點接通,該檢測點對應的指示燈亮。圖6為磁傳感器對應控制器I/O端口示意圖。
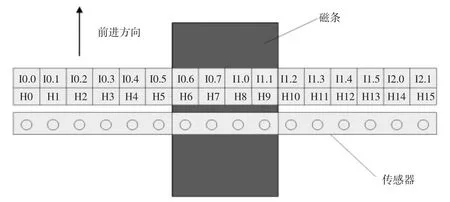
圖6 磁傳感器對應控制器I/O端口
為了方便分析,用and表示檢測點之間是“與”的關系,or表示檢測點之間是“或”的關系,“—”表示“非”的關系。各個檢測點可以分為三大類,分別是直行、左偏、右偏。
直行:直行表示磁條在磁傳感器中間。AGV行走過程中,由于地面平整度不是很高,在運行過程中會產生抖動,傳感器在抖動時會影響檢測范圍,因此在直行過程中應當允許AGV具有一定的偏差范圍,磁條在這個范圍內就默認AGV為直行。磁條在傳感器正中間時,檢測到4個點,在AGV產生抖動時,左右抖動都允許偏離一個檢測點,直行檢測點歸納如下:

當磁傳感器檢測到的點數滿足以上條件時,AGV應當保持直行,轉向電機應該保持正向偏轉。
左偏:直行程序保證AGV行駛在一定偏差范圍內,當磁條路徑有右小轉彎或者AGV車體向左偏時,控制系統應當停止直行程序,開始執行左偏程序,AGV向左偏離的幅度有大有小,因此根據檢測點的不同,應該設置不同的轉向角度,左偏檢測點歸納如下:
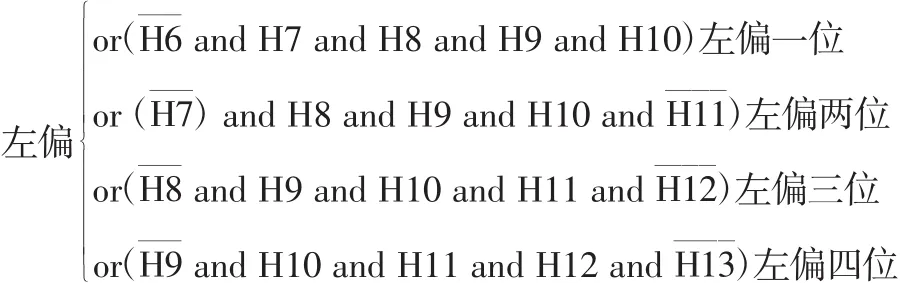
當磁傳感器檢測到的點數滿足以上條件時,AGV轉向電機應當向右偏轉,根據AGV向左偏離的角度大小設定不同的轉向角,本程序設置有四個左偏角度,根據傳感器檢測到的偏離位數來確定轉向電機向右偏轉的角度,AGV左偏角度大,轉向電機向右偏轉的角度相應增大。
右偏:除了直行、左偏外,應該還有右偏程序,當磁條路徑有左小轉彎或者AGV車體向右偏時,控制系統應當停止直行程序,開始執行右偏程序,AGV向右偏離的幅度有大有小,因此根據檢測點的不同,應該設置不同的轉向程序,右偏檢測點歸納如下:
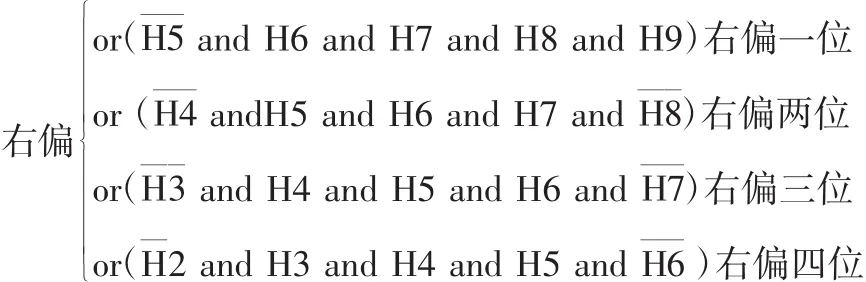
當磁傳感器檢測到的點數滿足以上條件時,AGV轉向電機應當向左偏轉,根據AGV向右偏離的角度大小設定不同的轉向角,本程序設置有四個右偏角度,根據傳感器檢測到的偏離位數來確定轉向電機向左偏轉角度,AGV右偏角度大,轉向電機向左偏轉的角度相應增大。
自動控制系統根據傳感器檢測到的信號,判定AGV的姿態,控制轉向電機做出相應的動作。直行、左偏、右偏三個姿態的檢測點都是相互獨立、互不相同的,因此在AGV運行過程中,根據不同的檢測點可以準確的判定AGV姿態,保證AGV沿著預定軌跡運行。
2.4 AGV叉貨軌跡路徑的規劃和實現
叉車式AGV的一個重要性能指標就是保證能把貨物搬運到指定地點,而搬運貨物的一個關鍵點就是叉貨路徑的規劃。要搬運的貨物一般放置在導引路徑邊上,AGV要去搬運貨物就必須要發生90°的轉向,并且轉向之后AGV的貨叉要剛好能夠叉入托盤底下正中央,本文根據叉車式AGV的特性設計了如圖7所示的叉貨路徑。AGV直線行走到轉向標志位A時,將立刻停車,轉向電機啟動,驅動輪向左轉90°,2 s之后AGV啟動,此時AGV將向B點靠近,走到位標志位B時,再次停車,轉向電機啟動將驅動輪轉正,兩秒后AGV正對著托盤前進,到達位置3后停車,液壓系統啟動,托盤被貨叉舉升,舉升到位后,AGV后退,到達位置4后,再次轉向90°,到達位置5,之后沿著導引路線行駛,叉貨動作結束。整個叉貨過程要停車4次,4次停車位置分別為位置1、位置2、位置3、位置4,在位置5將不再停車,而是直接沿著導引路徑行走,直到到達卸貨地點。
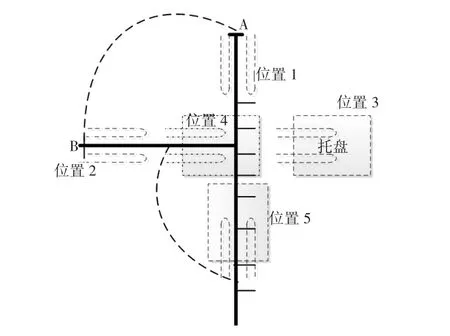
圖7 叉貨軌跡路徑規劃
2.5 磁導引的岔路口導引
在路徑規劃中,有時候會用到分岔路段,分岔路段如圖8所示,AB為磁導引傳感器,AGV沿著導引路線DC線行走,走到分叉點G時,導引路徑會分出GC和GH兩條路徑,這時候控制系統需要根據內部設定指令或者地面控制系統指令來選擇走哪條路徑[5]。
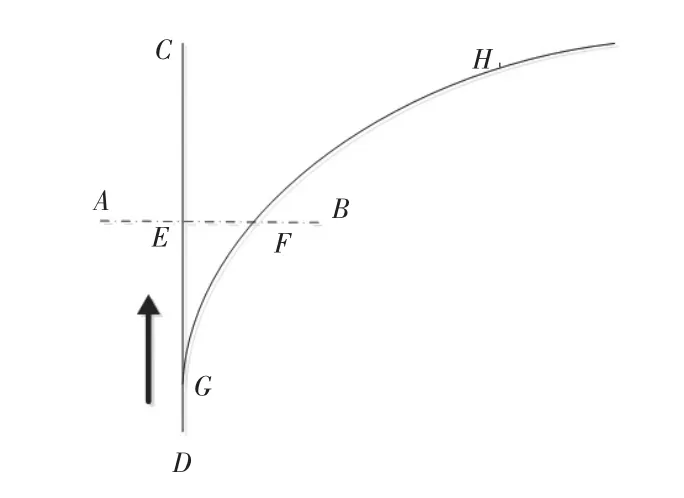
圖8 分岔路段
從圖8中可以看出,AGV經過分岔點G后將繼續行駛,行駛一小段路程后,磁傳感器中間會空出一段空白區域,磁傳感器在該區域沒有檢測到磁條信號,而磁傳感器的兩邊都會檢測到磁條信號,兩邊的信號就可以作為路徑選擇的啟動信號,如果選擇走GC路段就可以忽略GH路段的檢測信號,如果選擇走GH路段就可以忽略GC路段的檢測信號。這樣AGV就可以在分岔路段選擇行走路徑。
3 結束語
本文針對叉車式AGV的特點,研究分析了叉車AGV的軟件系統,根據磁傳感器檢測到的信號判斷AGV的位姿,當AGV車體偏離磁條時,AGV可以通過自動糾偏程序調節AGV的位姿,此外本文還重點分析了叉貨程序和分岔路段程序的設計方法,通過進行相關的實物實驗,本文所述軟件系統具有良好的適用性和穩定性。
[1]汪升鵬,張克軍.CBD2型2t電動托盤搬運車[J].工程機械,2011(04):7-10,101.
[2]李愛冉.單舵輪AGV驅動性能研究[D].昆明:昆明理工大學,2015.
[3]王忠海.激光導引AGV控制系統的研究與設計[D].贛州:江西理工大學,2015.
[4]姚建余.磁導航輥道移載式實驗AGV的設計與研究[D].南寧:廣西大學,2016.
[5]李 季.磁導引AGV的設計[D].濟南:山東大學,2013.
Design of AGV Software System for Magnetic Navigation Truck
QIN Shang-huo1,LIN Yi-zhong1,YANG Zhong-hua2,QIU Yong-bing2
(1.College of Mechanical Engineering,Guangxi University Nanning Guangxi 530004,China;2.Guangxi Agrcultural Machinery Research Institute,Nanning Guangxi 530007,China)
This paper briefly introduces the overall structure of magnetic navigation forklift AGV,focusing on AGV software system.Forklift AGV has manual and automatic control modes,manual control mode through the manual control handle to control AGV,automatic control mode through the main controller to send control signals to control AGV,automatic control mode need to write complex automatic control procedures,including:AGV initialization procedures,automatic correction procedures,forklift procedures,forklift procedures and so.
forklift AGV;magnetic navigation;automatic correction;forklift path planning
TP242.2
A
1672-545X(2017)08-0021-03
2017-05-17
南寧市科學研究與技術開發計劃項目(20150337)
覃尚活(1989-),男,碩士研究生,研究方向:機電液一體化。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
人大建設(2019年12期)2019-05-21 02:55:44
電子制作(2018年11期)2018-08-04 03:25:42
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
