車輪軋制線上多連桿機械手運動學(xué)仿真
2017-10-19 09:24:04胡曉麗
裝備制造技術(shù) 2017年8期
關(guān)鍵詞:水平
胡曉麗
(馬鞍山鋼鐵股份有限公司,安徽 馬鞍山243000)
車輪軋制線上多連桿機械手運動學(xué)仿真
胡曉麗
(馬鞍山鋼鐵股份有限公司,安徽 馬鞍山243000)
針對火車車輪軋制線上車輪鋼坯的上下料要求,構(gòu)建了一種多連桿二自由度機械手,利用ADAMS軟件對其進行了運動學(xué)仿真分析,使機械手整個運動過程直觀化,對各桿件的尺寸進行了校核,仿真結(jié)果表明該多連桿機械手滿足鋼坯上下料位置及速度要求。
車輪軋制;多連桿機械手;運動學(xué)仿真;ADAMS
在火車車輪熱軋系統(tǒng)中,全線采用液壓驅(qū)動機械手進行鋼坯的上下料傳遞。31.5 MN預(yù)成型壓力機前上料機械手的功能是:通過該機械手的手臂伸縮、手臂升降、機座的旋轉(zhuǎn)、夾鉗開閉、鉗頭旋轉(zhuǎn)等一系列動作,將除鱗機托臺上已除過鱗的重達700 kg的熱態(tài)輪坯夾住后移出、旋轉(zhuǎn),再將輪坯放到壓力機內(nèi)的下模臺上[1]。上料機械手位于除鱗機和壓力機之間,三者一條線排列,如圖1所示,機械手回轉(zhuǎn)架4的旋轉(zhuǎn)和機械手上夾鉗2的開閉旋轉(zhuǎn)動作簡單確定易實現(xiàn),但機械手手臂3的伸縮和升降需要同時動作,以實現(xiàn)取料時被抓鋼坯7從除鱗機托臺1上提起并移走,將鋼坯7移動并放到壓力機下模6上時,不碰到壓力機牌坊5,所以設(shè)計合適的機械手手臂機構(gòu)并對其進行仿真研究很有必要。
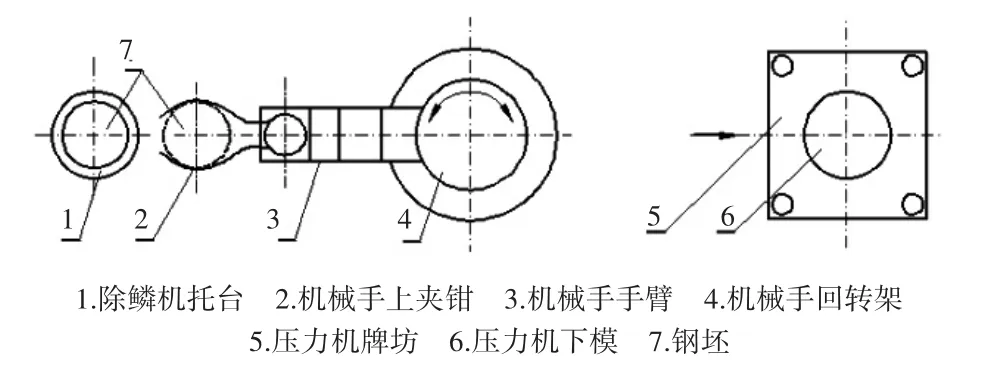
圖1 多連桿機構(gòu)模型
機械手主要有連桿型[2-3]、多軸型[4]和直立型等三種方式,其中,連桿型機械手由于其軌跡多變和性能可靠等優(yōu)點而被廣泛應(yīng)用。
用ADAMS仿真技術(shù)對機械手的運動學(xué)進行研究,可以了解機械手的定位要求、運動軌跡,并可對各構(gòu)件的主要結(jié)構(gòu)尺寸進行校核,檢驗是否滿足設(shè)計目標。
1 多連桿機械手的結(jié)構(gòu)
根據(jù)車輪熱軋生產(chǎn)線的工藝要求,本機械手應(yīng)該具有的主要性能參數(shù)如表1所示。
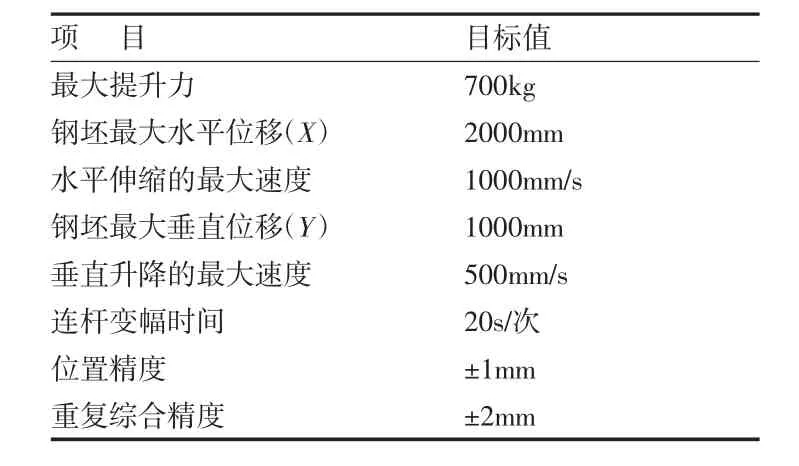
表1 機械手主要性能參數(shù)
機械手的動作由夾鉗開閉、連桿系統(tǒng)與回轉(zhuǎn)架一起旋轉(zhuǎn)、連桿變幅等運動復(fù)合而成。構(gòu)建的機械手總體結(jié)構(gòu)如圖2所示,主要由底座1、回轉(zhuǎn)架2、連桿系統(tǒng)3、夾鉗系統(tǒng)4、垂直油缸5、水平油缸6等組成。底座1固定不動,位于除鱗機與壓力機之間,夾鉗系統(tǒng)4固定在連桿系統(tǒng)3中夾鉗臂的端部,連桿系統(tǒng)3與回轉(zhuǎn)架2鉸連接再通過回轉(zhuǎn)支承安裝在底座1上。連桿系統(tǒng)的運動根據(jù)需要由垂直油缸5和水平油缸6分別驅(qū)動或聯(lián)合驅(qū)動,以實現(xiàn)夾鉗水平(X)和垂直方向(Y)的單獨運動或復(fù)合運動(圖2中從A點到 A′)。
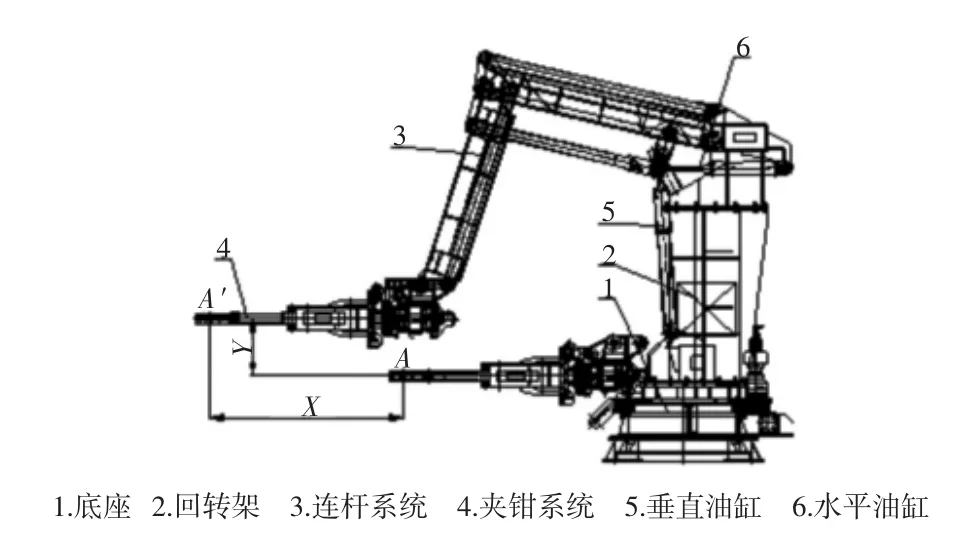
圖2 多連桿機械手結(jié)構(gòu)圖
機械手的連桿系統(tǒng)部分采用多套平行四連桿機構(gòu)嵌套組合,各運動軸可以分別運動,也可以復(fù)合運動。通過液壓伺服控制比例閥分別或同時驅(qū)動垂直油缸5和水平油缸6,可實現(xiàn)連桿系統(tǒng)中夾鉗臂的單獨伸縮和升降或復(fù)合運動。為了提高產(chǎn)品的合格率,要求機械手的重復(fù)綜合精度達±2 mm.為了保證生產(chǎn)效率,本機械手的連桿變幅時間控制在20 s內(nèi)/次。
2 多連桿機械手仿真模型
通過相應(yīng)位置傳感器的信號控制,本機械手的回轉(zhuǎn)運動和夾鉗開閉動作是確定的,需要利用ADAMS軟件進行運動仿真的是連桿變幅系統(tǒng),該連桿系統(tǒng)中各連桿的尺寸及其相互連接方式將決定夾鉗臂的伸縮運動和升降運動,通過仿真看其是否滿足上下料的工藝要求。
基于上述分析,也為了分析的簡便,機械手運動仿真中,不考慮回轉(zhuǎn)架的旋轉(zhuǎn)和夾鉗的開閉,把圖2中底座1和回轉(zhuǎn)架2均看作是固定的,各部分結(jié)構(gòu)簡化成基本桿件,利用ADAMS軟件進行建模[5]如圖3所示。
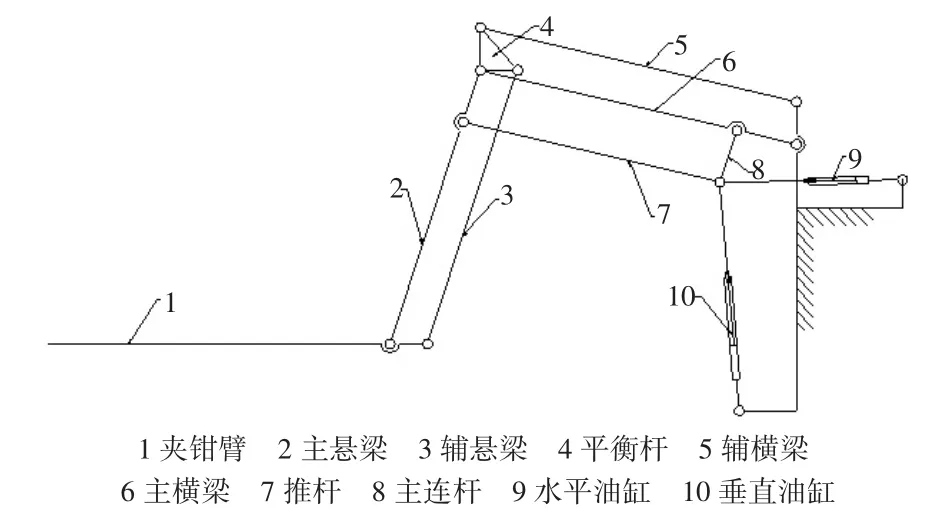
圖3 多連桿機構(gòu)模型
圖3 模型中,根據(jù)實際模型尺寸對主要零部件加以分析簡化,其中2個油缸的約束采用棱柱副約束,底座和回轉(zhuǎn)架采用固定約束,各桿件之間采用鉸接副連接。該多連桿機構(gòu)模型中,夾鉗臂1、主懸梁2、輔懸梁3和平衡桿4組成了一個平行四邊形平面連桿機構(gòu),平衡桿4、輔橫梁5、主橫梁6和回轉(zhuǎn)架組成了另一個平行四邊形平面連桿機構(gòu),主橫梁6、推桿7、主連桿8和主懸梁2組成了第三個平行四邊形平面連桿機構(gòu)。經(jīng)反復(fù)仿真試算后,在滿足工藝要求的情況下,最后確定的各桿件長度參數(shù)見表2.
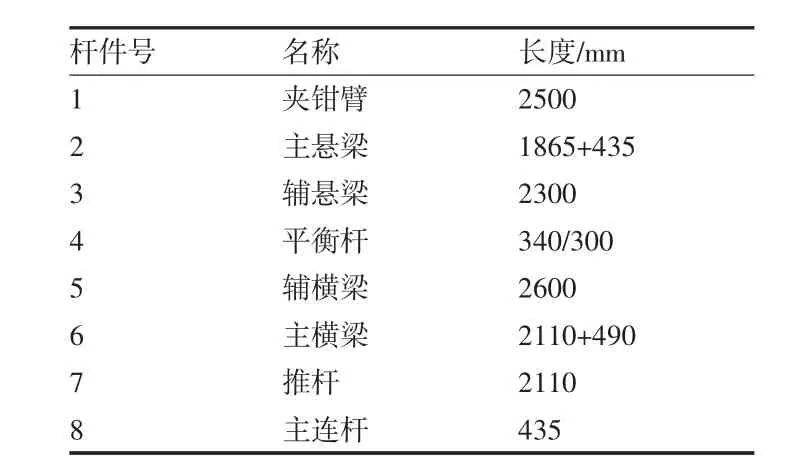
表2 機械手主要桿件長度表
由圖3可看出,該多連桿機構(gòu)中活動桿件數(shù)n為12,低副個數(shù)PL為17個,高副個數(shù)PH為0,可計算出平面機構(gòu)的自由度為2,即機械手存在平面內(nèi)伸縮與升降兩個自由度。
3 多連桿機械手運動學(xué)仿真分析
本多連桿機械手機構(gòu)復(fù)雜,本文主要檢驗該機構(gòu)的構(gòu)成及其尺寸能否滿足上下料極限位置和極限速度的工藝要求,為了利于反復(fù)仿真并修改各桿件尺寸,故分別就水平油缸單獨運動和垂直油缸單獨運動的兩種情況進行運動仿真。
垂直油缸動作時,水平油缸不動,通過建立垂直油缸之移動副的約束驅(qū)動,為研究方便,運用ADAMS/View提供的時間函數(shù)[5]來定義驅(qū)動函數(shù)1*(time-185),類型設(shè)置為位移,將仿真時間設(shè)置為200 s,仿真步數(shù)設(shè)置為500,仿真計算出的夾鉗部位的垂直升降位移曲線如圖4所示。
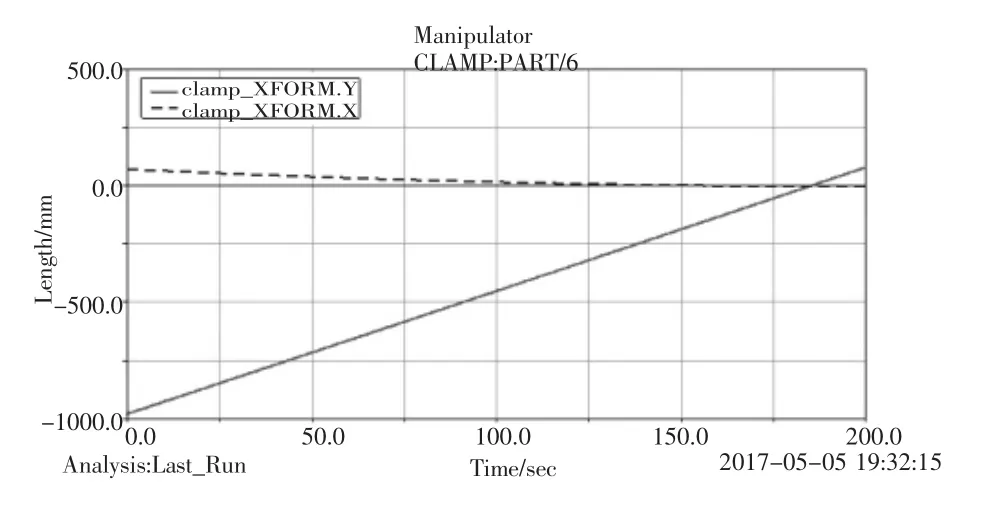
圖4 夾鉗垂直運動位移曲線
從圖4中可以看出,仿真為時間180 s時,垂直油缸行程為180 mm,夾鉗的上升行程為1 000 mm,可以滿足夾鉗的位移從地面-1 000 mm處上升到0 mm,滿足設(shè)計要求。垂直油缸工作時夾鉗的水平位置基本保持恒定。
利用ADAMS/View提供的時間函數(shù)來定義驅(qū)動函數(shù)-95,類型設(shè)置為速度,仿真時間和仿真步數(shù)設(shè)置同上,定義垂直油缸之移動副的約束驅(qū)動,仿真計算結(jié)果是,當垂直油缸速度為95 mm/s運動時,夾鉗部位的垂直速度達到500 mm/s,滿足設(shè)計要求。
水平油缸動作時,垂直油缸不動,通過建立水平油缸之移動副的約束驅(qū)動,為研究方便,利用ADAMS/View提供的時間函數(shù)來定義驅(qū)動函數(shù)-time,類型設(shè)置為位移,將仿真時間設(shè)置為400 s,仿真步數(shù)設(shè)置為500,然后進行仿真計算,仿真出夾鉗部位的水平位移曲線如圖5所示。
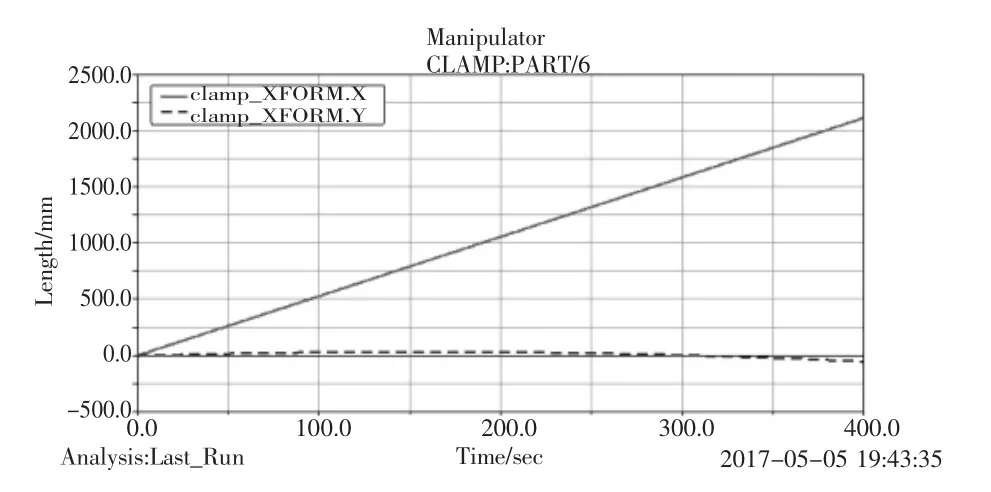
圖5 夾鉗水平運動位移曲線
從圖5中可以看出,當仿真為時間380 s時,水平油缸行程為380 mm,夾鉗的水平位移從緊靠回轉(zhuǎn)架處伸出2 000 mm,即夾鉗的水平位移為2 000 mm,滿足設(shè)計要求。水平油缸工作時夾鉗的高度基本保持恒定。
利用ADAMS/View提供的時間函數(shù)來定義驅(qū)動函數(shù)-190,類型設(shè)置為速度,仿真時間設(shè)置和仿真步數(shù)設(shè)置同上述第二種情況,定義水平油缸的移動副的約束驅(qū)動。仿真計算結(jié)果是,當水平油缸速度為190 mm/s運動時,夾鉗的水平速度達到1 000 mm/s,也滿足設(shè)計要求。
水平油缸和垂直油缸同時工作時,可得到不同的機械手末端曲線軌跡,選擇其中滿足取料、放料及變幅移動的最佳軌跡,需做進一步運動仿真。
4 結(jié)論
根據(jù)火車車輪軋制線上車輪鋼坯的上下料要求,構(gòu)建了一種由回轉(zhuǎn)機構(gòu)、連桿系統(tǒng)、夾鉗系統(tǒng)等機構(gòu)組成的多連桿機械手,其中連桿系統(tǒng)由三個平行四邊形平面連桿機構(gòu)鑲合而成,建立了該機械手的三維模型,利用ADAMS軟件對其進行了運動學(xué)仿真分析,使機械手的整個運動過程直觀明了,經(jīng)過反復(fù)仿真試算,確定了各桿件的尺寸。
仿真結(jié)果表明,夾鉗的水平和垂直運動可以分別用水平油缸和垂直油缸獨立完成,仿真的位移與時間曲線顯示,所設(shè)計的多連桿機械手滿足了上下料所需的末端執(zhí)行器——夾鉗的最大位移和最大速度設(shè)計要求。連桿變幅時間及位置精度則需依據(jù)最佳運動軌跡及最大移動速度等參數(shù)由控制系統(tǒng)來實現(xiàn)。
[1]張世友.車輪壓軋線全液壓重載機械手自動控制系統(tǒng)[J].冶金動力,2013(9):63-66.
[2]陳 功,顧寄南,鄭立斌,等.基于六桿機構(gòu)的機械手運動分析與優(yōu)化[J].機床與液壓,2015,43(9):56-58.
[3]姚永玉,李凌基.基于虛擬裝配技術(shù)的連桿機械手運動干涉研究[J].裝備制造技術(shù),2009(3):14-15.
[4]陳向偉,高 強,肖 冰,等.基于ADAMS的五自由度機械手的設(shè)計及運動學(xué)仿真[J].制造業(yè)自動化,2014(4):40-43.[5]鄭建榮.ADMAS虛擬樣機技術(shù)入門與提高[M].北京:機械工業(yè)出版社,2002.
Kinematics Simulation of Multi Link Manipulator in Train Wheel Rolling Line
HU Xiao-li
(Maanshan Iron&Steel Co.,Ltd.,Ma’anshan Anhui 243000,China)
In order to meet the requirement of the automatic feeding and unloading material in the train wheel rolling line,a multi link manipulator is designed which has two degrees of freedom.ADAMS software is used to simulate the kinematics of the manipulator,which makes the whole process of the manipulator visual and the size of each rod is checked.The simulation results show that the requirements of the position and speed for billet feeding and unloading can been meet by the multi link manipulator.
wheel rolling;multi-link manipulator;kinematics simulation;ADAMS
TH133.5
A
1672-545X(2017)08-0027-03
2017-05-09
胡曉麗(1973-),女,安徽阜陽人,高級工程師,工學(xué)學(xué)士,從事冶金軋鋼設(shè)備技術(shù)工作。
猜你喜歡
美與時代·美術(shù)學(xué)刊(2022年3期)2022-04-27 01:18:15
火花(2019年12期)2019-12-26 01:00:28
人大建設(shè)(2019年6期)2019-10-08 08:55:48
人大建設(shè)(2019年12期)2019-05-21 02:55:32
雜文月刊(2018年21期)2019-01-05 05:55:28
人大建設(shè)(2017年6期)2017-09-26 11:50:44
學(xué)苑創(chuàng)造·A版(2015年11期)2016-01-14 09:03:27
俄羅斯問題研究(2012年1期)2012-03-25 09:54:45
中國火炬(2010年12期)2010-07-25 13:26:22
中國火炬(2010年8期)2010-07-25 11:34:30
