
多旋翼無人機姿態控制方法設計與分析
2017-10-19 09:24:08母庚鑫華北水利水電大學河南鄭州450045
裝備制造技術 2017年8期
母庚鑫,白 磊 ,楊 旭(華北水利水電大學,河南 鄭州450045)
多旋翼無人機姿態控制方法設計與分析
母庚鑫,白 磊 ,楊 旭
(華北水利水電大學,河南 鄭州450045)
多旋翼無人機因其機械結構簡單、維護使用方便等突出特點,近幾年在各個應用領域發展迅速。但由于其動態系統為非線性、強耦合,并且對外界及自身系統干擾敏感等特點使其系統難以控制。通過分析無人機的飛行姿態,設計了一種相對傳統PID控制方法進行改進的無人機姿態控制方法,并在軟件上編程實現,通過飛行測試及地面站輸出的結果,驗證了該方法確實有助于改善無人機的動態性能,使其在有外界及自身系統干擾的情況下更易于控制,更穩定。
多旋翼無人機;姿態分析;改進PID;姿態控制
多旋翼無人機具有在小區域范圍內定點起飛、懸停,飛行更機動更靈活的優勢成為當前研究的熱點[1]。但是空氣流動等飛行條件不斷地變化容易導致無人機的橫滾和姿態偏移,甚至導致飛行穩定性失衡,引起墜機事故。因此設計出一種可靠、穩定的無人機姿態控制方法具有重要意義。
1 飛行姿態分析
本文以結構簡單的四旋翼無人機為例,對四旋翼無人機的飛行姿態進行具體分析。無人機的飛行姿態與飛行動作主要分為:飛行高度控制、飛行俯仰(Pitch)角控制、飛行橫滾(Roll)角控制以及飛行航偏(Yaw)角控制。
如圖1所示,無人機的四個電機同時加速或減速能夠實現無人機在垂直方向上的上升和下降運動[2]。在改變量一致的條件下,電機 1的轉速上升,電機3的轉速下降,并使電機2、4保持原來轉速。由于旋翼1的升力變大,旋翼 3的升力變小,產生的不平衡力矩使機身繞 y軸旋轉,同理,當電機1的轉速下降,電機3的轉速上升,機身便繞y軸向另一側旋轉,實現無人機的俯仰運動。橫滾運動與俯仰運動的原理相同,電機1、3轉速保持不變同時改變電機2、4的轉速,機身則繞x軸旋轉。
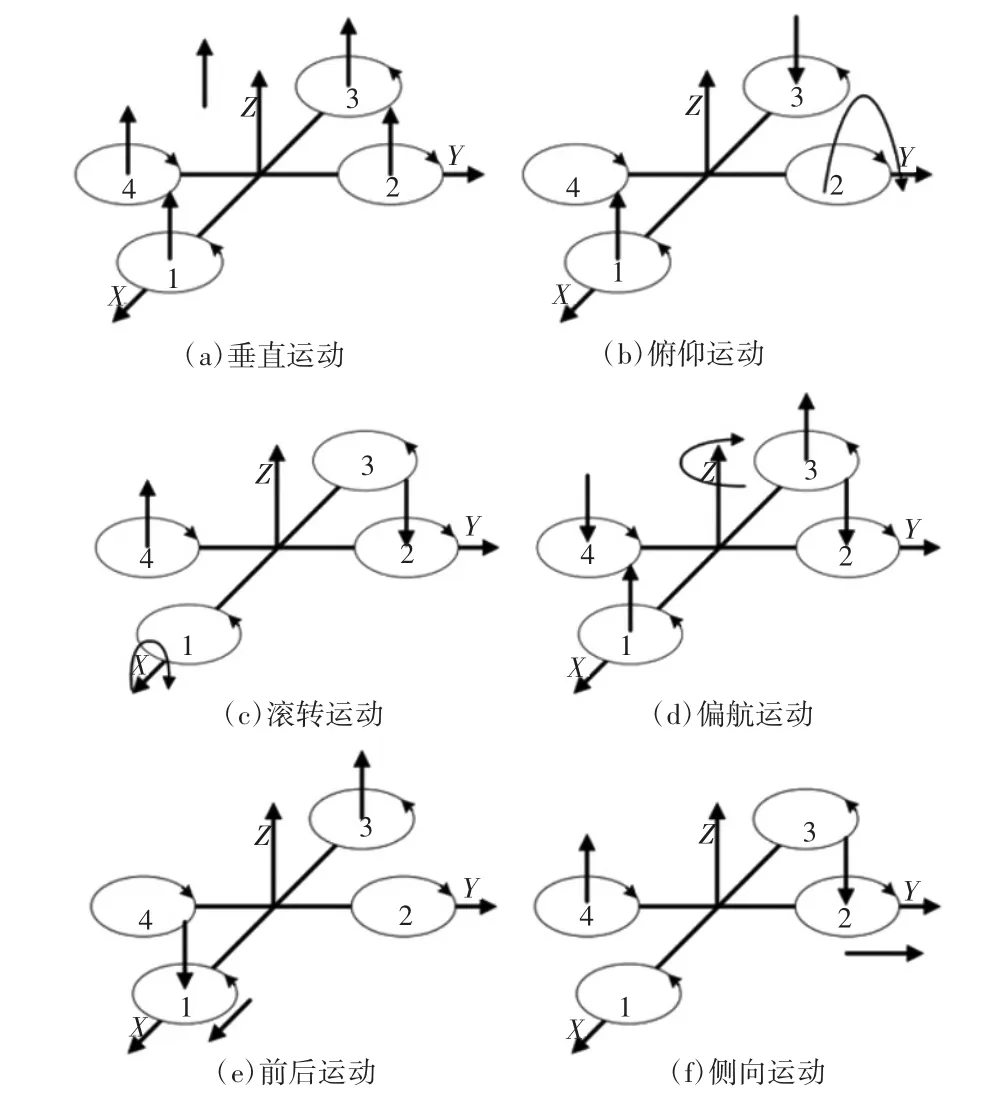
圖1 四旋翼無人機沿各自由度的運動
無人機做俯仰運動與橫滾運動的同時也會連帶產生前后運動與側向運動。無人機復雜的飛行狀態可以由以上基本運動的組合實現。
2 姿態控制方法設計
姿態控制策略是通過對比無人機的當前姿態與目標姿態,利用這兩者之間的偏差通過PID控制算法計算出合適的控制量驅動電機調整無人機姿態[3]。
由于位置式PID采用全量輸出,輸出的是執行機構的實際位置,每次輸出均與過去狀態有關,計算時要對偏差進行累加造成工作計算量大,所以增量式PID算法具有明顯優勢。
增量式PID控制算法的表達式為:
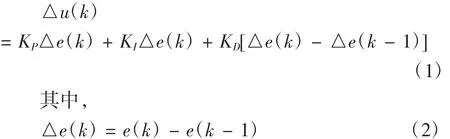
其中KP、KI、KD分別為數字PID控制器的比例系數、積分系數、微分系數;u(k)是第k次采樣時刻計算的PID輸出值;e(k)是第k次采樣時刻系統給定值與被控對象輸出值的偏差[4]。
本文設計一種改進的數字PID控制算法,即外環PID控制算法和內環PID控制算法。外環PID控制算法主要是綜合傳感器讀取的數據通過算法計算出無人機當前需要的油門量、俯仰角、橫滾角、航偏角等參數傳送給內環控制。內環PID控制算法是根據無人機的當前姿態與外環給定的相關參數作對比,利用當前姿態與目標姿態之間的差值,通過內環PID控制算法計算出合適的控制量以消除姿態誤差,完成無人機姿態的平穩控制。
具體實現為:無人機每一時刻的姿態都可由橫滾角、俯仰角、航偏角表示,針對每一個自由度,都是一個二階系統。分別對這三個角度采用PID控制,由此可以將復雜的非線性多變量輸入、輸出控制問題簡化為兩變量輸入單變量輸出問題[5]。
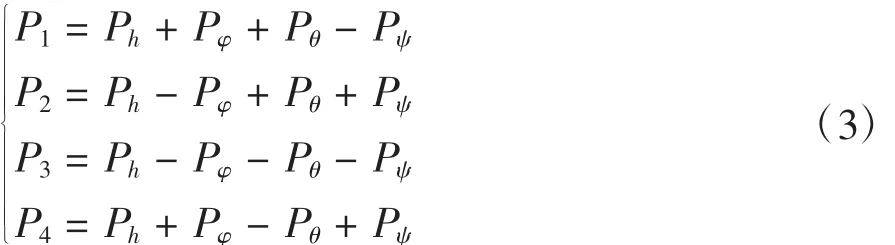
其中 P1、P2、P3、P4分別代表控制 4 個直流無刷電機驅動器所需的PWM值,P4表示維持無人機飛行高度所需升力的 PWM 值,Pφ、Pθ、Pψ分別代表修正航偏角偏差、俯仰角偏差和橫滾角偏差及其變化率所需的 PWM 值[6]。
Pφ、Pθ、Pψ采用改進的 PID 控制方法進行計算,內回路和外回路分別為角速度控制回路和角度控制回路并且三個角度的控制規律一致,以橫滾角控制為例,ψ為無人機當前的橫滾角,ψ為當前的橫滾角速度。ψ1為外環PID控制器的輸出值,ψout是內環PID控制器的輸出值,即Pψ=ψout.如圖2所示,ψr其中表示為無人機的目標橫滾角。
圖2 無人機姿態PID控制框圖
首先求得多旋翼無人機的姿態誤差信號和誤差率,再通過改進的PID控制算法得到每個電機的控制量并傳遞給相應的電機,通過改變電機的轉速來調整無人機的姿態,盡可能的消除姿態誤差,從而形成兩級閉環回路控制[7]。
3 程序設計與結果分析
飛控系統上電后先進行初始化,然后讀取陀螺儀、氣壓計、電子羅盤、加速度計等傳感器數據。對數據分析對比后判斷無人機的姿態是否變化,如果姿態發生變化,在更新姿態數據完成后通過改進的PID控制算法輸出PWM從而控制電機調整姿態,使姿態誤差短時間內達到最小值并保持穩定。控制算法程序流程圖如圖3.
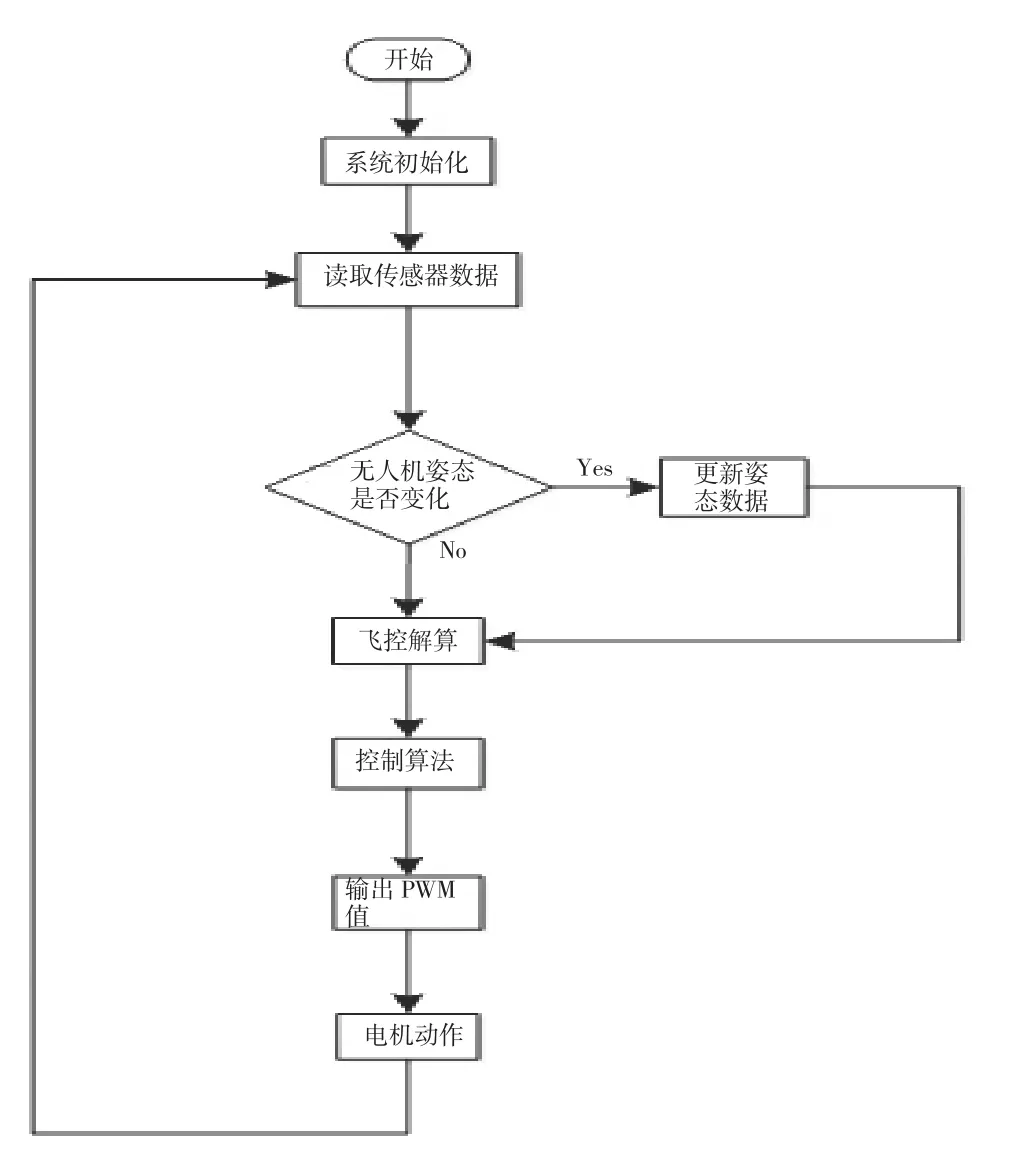
圖3 程序流程圖
為驗證本文設計的控制算法的有效性,利用四旋翼無人機進行實際飛行測試。在圖4飛行姿態測試圖a中,無人機在2.2 s時開始做橫滾運動到2.7 s時調整回水平姿態經歷了0.5 s的時間;在測試圖b中,無人機從77.1 s開始做俯仰運動到77.7 s時調整回水平姿態經歷了0.6 s的時間;測試圖c為無人機在懸停狀態并無遙控器輸入的條件下,橫滾角和俯仰角的變化曲線圖。通過對測試圖的分析,可以得到利用本文設計的控制方法無人機能夠可靠的飛行并迅速準確的完成俯仰、橫滾、航偏等動作,并且還具有一定的抗干擾能力。
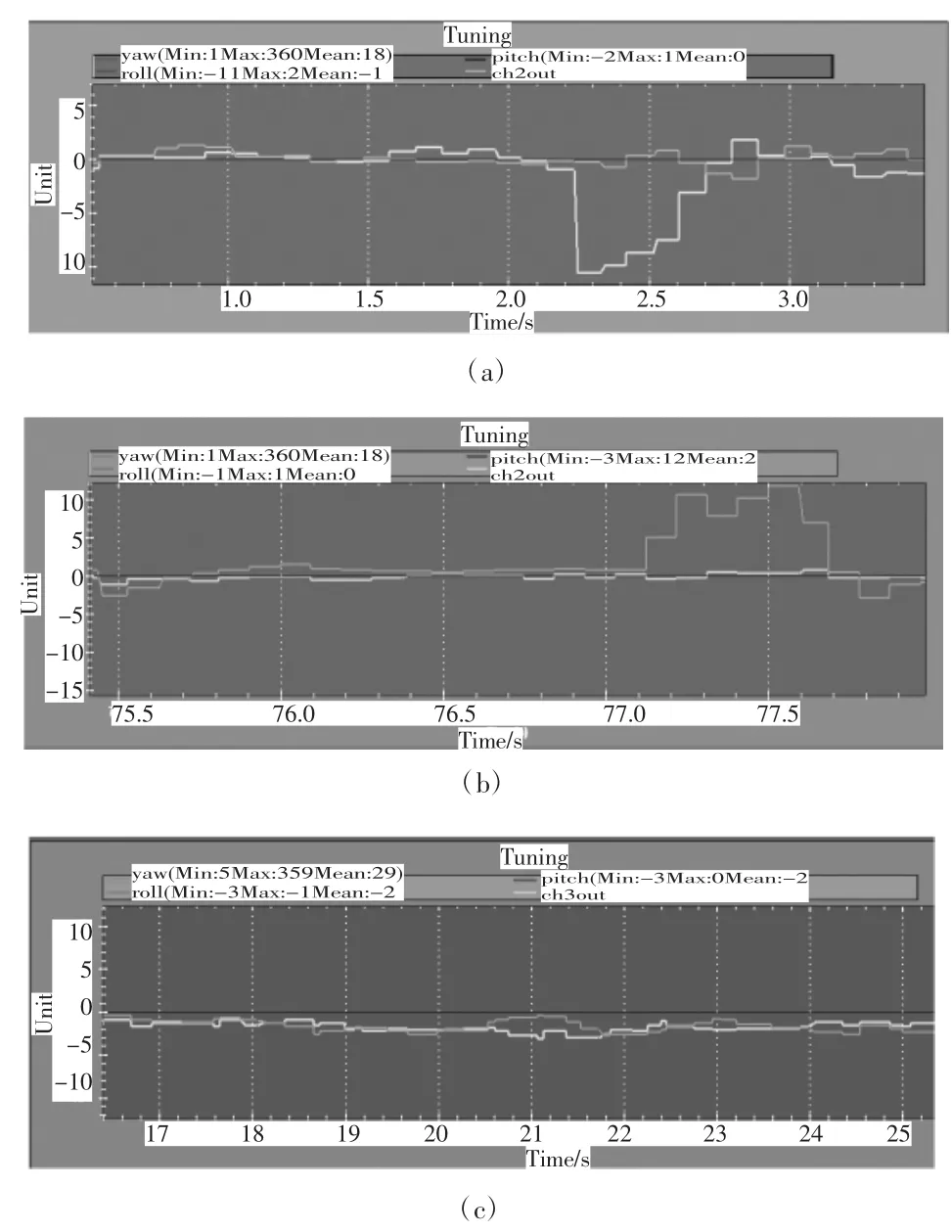
圖4 飛行姿態測試圖
4 結束語
本文設計的姿態控制方法在傳統數字PID控制算法的基礎上做出改進,既保持了傳統PID的優點,又克服了傳統PID精度不高的不足,還避免了采用其他智能算法帶來的編程復雜性。實驗結果表明:采用本文設計的控制方法,無人機能夠可靠的飛行并完成俯仰、橫滾、航偏等動作,還能根據目標姿態迅速作出調整,大幅度提高了無人機飛行定姿的精度。
[1]胡占雙.無人機飛行姿態檢測及控制研究[D].沈陽:沈陽航空航天大學,2013.
[2]冀 亮,錢正洪,白 茹.基于四元數的四軸無人機姿態的估計和控制[J].現代電子技術,2015(11):112-116.
[3]于洪國,王 平.一種改進的最優PID參數自整定控制方法[J].現代電子技術,2010,33(19):162-164.
[4]張 靜,劉 恒,鄭采薇.串級PID控制在微型無人機姿態控制中的應用[J].電子世界,2014(16):271-272.
[5]齊曉龍,雷繼海.雙閉環串級控制算法在四旋翼飛行器中的應用[J].自動化與儀器儀表,2016(4):90-92.
[6]馮慶端,裴海龍.串級PID控制在無人機姿態控制的應用[J].微計算機信息,2009,25(22):9-10.
[7]李方良,李鐵鷹,王耀力.無人機四旋翼飛行姿態穩定性控制優化[J].計算機仿真,2016,33(10):43-47.
Design and Analysis of Attitude Control for Multi Rotor Unmanned Aerial Vehicle
MU Geng-xin,BAI Lei,YANG Xu
(North China University of Water Resouces and Electric Power,Zhengzhou Henan 450045,China)
Because of its simple structure and convenient maintenance,the multi rotor UAV has developed rapidly in various fields in recent years.However,the dynamic system is nonlinear,strong coupling,and sensitive to the outside world and its own system.In this paper,through the analysis of the UAV flight attitude,a control method of UAV attitude control method is improved compared with the traditional PID design,and the software programming,through the flight test and ground station output results,verify the dynamic performance of this method does help to improve the UAV,the interference the outside world and its own system under the condition of more easy to control,more stable.
multi rotor UAV;attitude analysis;improved PID;attitude control
TP23
A
1672-545X(2017)08-0037-03
2017-05-01
母庚鑫(1992-),男,河南永城人,碩士,研究方向為檢測技術與自動化裝置方向;白 磊(1989-),男,河南杞縣人,助教,碩士,研究方向為控制工程;楊 旭(1992-),男,河南南陽人,碩士,研究方向為檢測技術與自動化裝置方向。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
兒童故事畫報(2019年5期)2019-05-26 14:26:14
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
