下肢外骨骼助力裝置
2017-10-19 09:24:20王諾彬李曉丹李佳希李正帥陳澤勇
裝備制造技術(shù) 2017年8期
王諾彬,李曉丹,李佳希,李正帥,陳澤勇
(遼寧工業(yè)大學(xué) 機(jī)械工程與自動(dòng)化學(xué)院,遼寧 錦州121001)
下肢外骨骼助力裝置
王諾彬,李曉丹,李佳希,李正帥,陳澤勇
(遼寧工業(yè)大學(xué) 機(jī)械工程與自動(dòng)化學(xué)院,遼寧 錦州121001)
提出了一種仿生的下肢外骨骼助力裝置,依據(jù)人體的運(yùn)動(dòng),為穿戴者提供輔助力。介紹了該擬人仿生助力機(jī)械腿的總體機(jī)械結(jié)構(gòu)及相關(guān)的硬件電路控制方案,編制了相應(yīng)的軟件程序。實(shí)驗(yàn)證明,該助力裝置能夠幫助人減輕勞動(dòng)強(qiáng)度。
仿生助力裝置;機(jī)械腿;系統(tǒng)設(shè)計(jì)
隨著快遞行業(yè)的高速發(fā)展,消費(fèi)者購買的各種規(guī)格、重量的物品越來越多,同時(shí)帶來的就是快遞員搬運(yùn)運(yùn)輸問題。目前,快遞物品基本靠快遞員進(jìn)行人工搬運(yùn),不僅費(fèi)時(shí)費(fèi)力,而且工作效率還低,當(dāng)所搬運(yùn)物品太重時(shí),貨物容易脫手掉到地上,發(fā)生物品的破損。
為了解決工作人員費(fèi)力問題,提出了一種下肢外骨骼助力系統(tǒng),它采用電機(jī)驅(qū)動(dòng)[1],可以實(shí)現(xiàn)對人體腿部行走提供動(dòng)力,通過液壓鎖死裝置與助力骨架對腳部承載重物實(shí)現(xiàn)助力支撐。它穿戴在快遞員的下肢上,在不妨礙人的基本行走功能的前提下,幫助快遞員減少搬運(yùn)重物時(shí)的勞動(dòng)強(qiáng)度,減輕快遞員工作負(fù)擔(dān),而且能保障商品安全,使快遞員省力高效的完成搬運(yùn)物品的任務(wù),避免了邊走邊停,搖搖晃晃的情況,與人體組成了一個(gè)協(xié)調(diào)的整體。同時(shí)本文提出的裝置具有控制簡單,不用搭建復(fù)雜的控制平臺,降低成本的特點(diǎn)。
1 下肢外骨骼助力裝置機(jī)械結(jié)構(gòu)簡介
由于人體下肢關(guān)節(jié)較多,實(shí)現(xiàn)較為復(fù)雜,為簡化機(jī)構(gòu),將髖關(guān)節(jié)簡化為一個(gè)球銷副[2],只具有兩個(gè)轉(zhuǎn)動(dòng)自由度(大腿前后擺和左右擺),外骨骼腰部和人體腰部固連,使人體腰部的三個(gè)自由度不受外骨骼限制,膝關(guān)節(jié)仍然為轉(zhuǎn)動(dòng)副,其他自由度都由人體自由支配[3],使得運(yùn)動(dòng)規(guī)律和人體自然行走步態(tài)的規(guī)律十分吻合,運(yùn)動(dòng)規(guī)律固定,具有較高的穩(wěn)定性,達(dá)到輔助人行走減少行走消耗的目的;同時(shí)在不增加能源情況下,可實(shí)現(xiàn)側(cè)向擺動(dòng),增加運(yùn)動(dòng)靈活性。本裝置直接采用電機(jī)帶動(dòng),避免了能源的二次轉(zhuǎn)換,并且小腿轉(zhuǎn)動(dòng)采用了液體鎖死裝置(無需液壓泵動(dòng)力源),降低了能耗,減輕了負(fù)載。
裝置總體結(jié)構(gòu)如圖1所示。驅(qū)動(dòng)電機(jī)(17)固定在下肢外骨骼助力系統(tǒng)的背后電機(jī)固定架(1)上,電機(jī)軸通過萬向聯(lián)軸器(2)與固定在主動(dòng)同步帶輪(16)上的軸(15)相連,并且與側(cè)向擺動(dòng)裝置(3)在同一水平面上,同步帶輪軸均插入帶有軸承的法蘭盤(13)中,法蘭盤和機(jī)架固定。主動(dòng)同步帶輪和從動(dòng)同步帶輪(12)通過同步帶(14)傳遞扭矩,從動(dòng)同步帶輪與曲柄連桿機(jī)構(gòu)(11)的一端連接,連桿機(jī)構(gòu)另一端連接到助力裝置大腿(4)外側(cè)的軸(10),配合后可以帶動(dòng)大腿的抬起和落下,小腿(6)則使用液體鎖死裝置(7)的伸縮來完成抬腿動(dòng)作,腳掌(8)兩側(cè)的行程開關(guān)(9)檢測行走時(shí)的重力變化。大腿、小腿以及腳掌之間使用轉(zhuǎn)動(dòng)軸(5)進(jìn)行連接。每條腿均由一個(gè)驅(qū)動(dòng)電機(jī)和一個(gè)液體鎖死裝置控制,所有電機(jī)和液壓裝置由控制系統(tǒng)發(fā)出不同命令進(jìn)行控制,達(dá)到對下肢外骨骼助力系統(tǒng)的控制。該裝置的大部分重量作用在髖關(guān)節(jié),有效地降低了腿部轉(zhuǎn)動(dòng)的慣量,降低了電機(jī)的能耗。
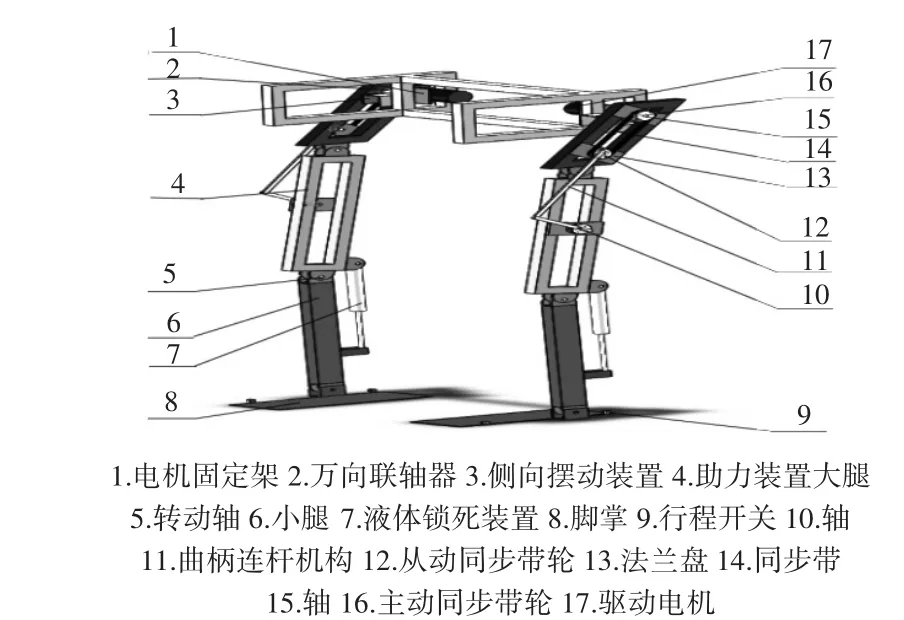
圖1 下肢外骨骼助力裝置結(jié)構(gòu)圖
2 控制系統(tǒng)設(shè)計(jì)
裝置采用MC9S128單片機(jī)作為主控制器,其控制總體方案如圖2所示。外部傳感器、啟動(dòng)開關(guān)、調(diào)速按鈕作為輸入信號給單片機(jī),單片機(jī)接收外部的信號進(jìn)行處理,將處理完的信號經(jīng)光耦隔離控制外部元件驅(qū)動(dòng)器和電磁閥,控制驅(qū)動(dòng)電機(jī)和鎖死裝置[4-5]。其中,電機(jī)用來控制大腿轉(zhuǎn)動(dòng),液體鎖死裝置控制小腿轉(zhuǎn)動(dòng),兩個(gè)行程開關(guān)分別安裝在兩個(gè)腳掌上,用來判斷每條腿的著地情況,實(shí)現(xiàn)兩條腿交替信號的轉(zhuǎn)換;通過調(diào)節(jié)調(diào)速旋鈕發(fā)出不同的電信號給單片機(jī),單片機(jī)識別處理,來控制電機(jī)轉(zhuǎn)速,適應(yīng)不同人的行走步伐。整體的動(dòng)作過程是,按動(dòng)啟動(dòng)按鈕,電機(jī)開始轉(zhuǎn)動(dòng),帶動(dòng)大腿連桿運(yùn)動(dòng),如果感覺行走的速度較快,則通過按下減速按鈕改變控制驅(qū)動(dòng)器的占空比,從而降低電機(jī)的轉(zhuǎn)速,步伐速度變小;若占空比降到最小,再次按下減速按鈕電機(jī)不在減速,保持最小轉(zhuǎn)速;如果感覺電機(jī)的轉(zhuǎn)速較慢,則通過按下增速按鈕增值控制驅(qū)動(dòng)器的占空比,來提高電機(jī)的轉(zhuǎn)速,同樣當(dāng)占空比達(dá)到最大值,轉(zhuǎn)速也不再增加,保持在最大速度。當(dāng)想要停止時(shí)按下停止按鈕,單片機(jī)停止發(fā)送PWM波,電機(jī)停止工作;程序初始化主要是完成對所用到的寄存器設(shè)置。具體工作流程如圖3所示。
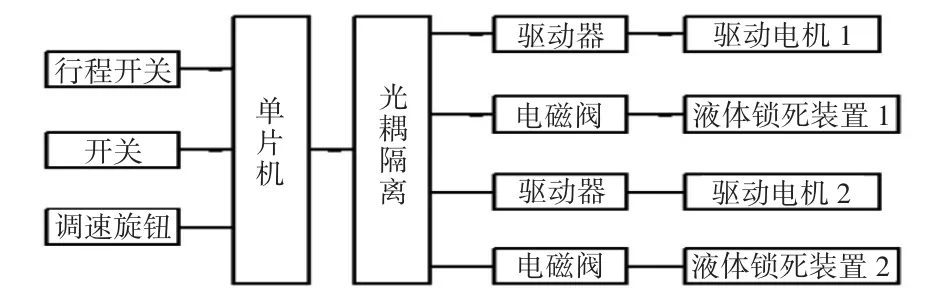
圖2 控制總體方案
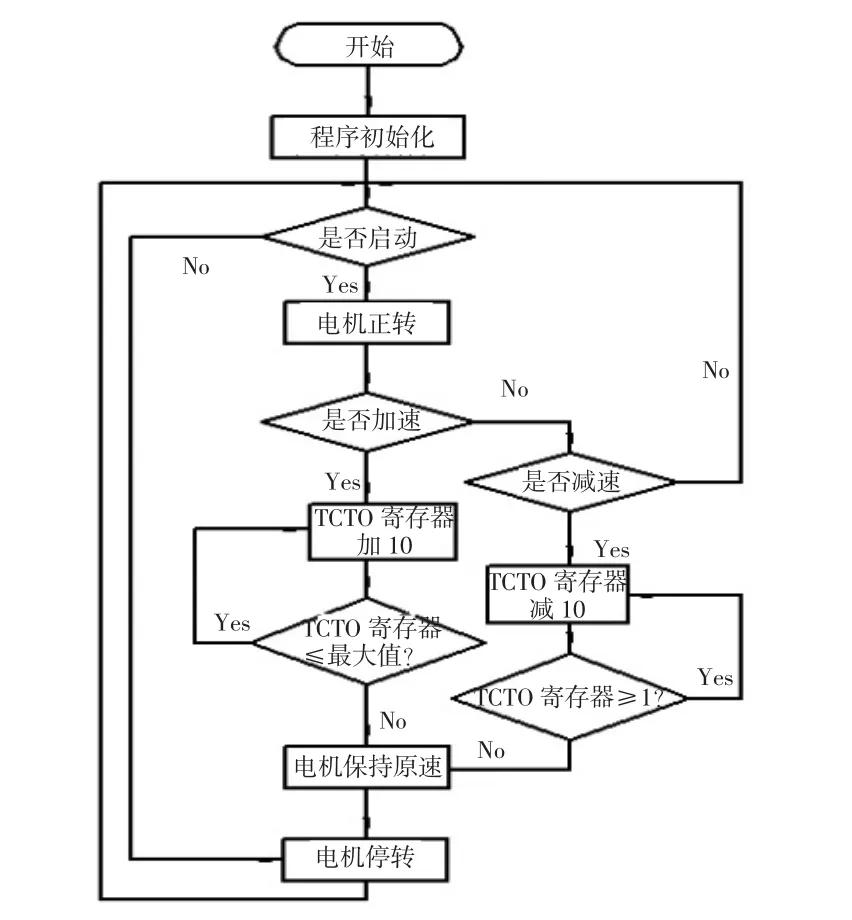
圖3 控制總體方案
基于以上設(shè)計(jì)開發(fā)的下肢外骨骼助力裝置實(shí)物如圖4所示。通過穿戴者感受,該裝置能很好的滿足功能需求,實(shí)現(xiàn)了助力。
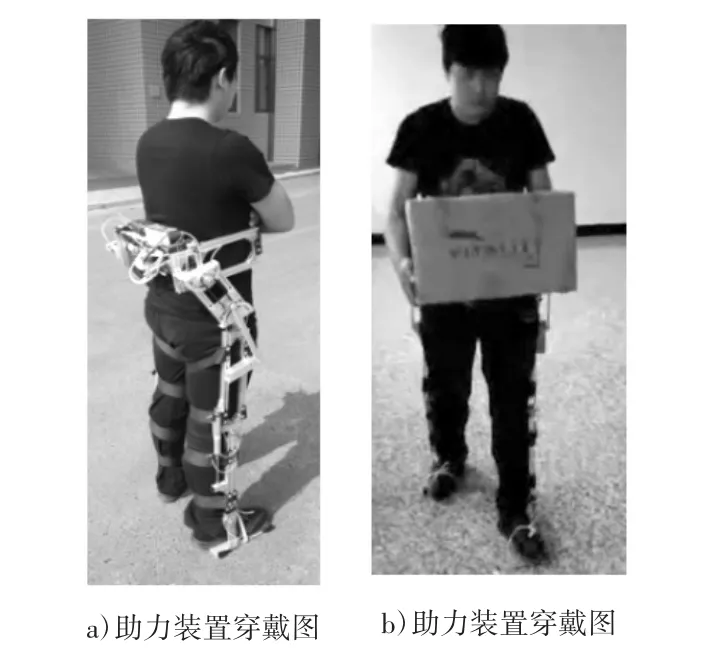
圖4 實(shí)驗(yàn)圖片
3 結(jié)束語
本文所提出的下肢外骨骼助力系統(tǒng)相當(dāng)于一個(gè)搭載器,它能根據(jù)人體運(yùn)動(dòng)及傳感器信息來提供助力,實(shí)現(xiàn)動(dòng)力輸出,達(dá)到助力的目的;并且該裝置簡化了人體的復(fù)雜關(guān)節(jié),具有控制簡單,成本低的特點(diǎn),具有一定的推廣價(jià)值。
[1]張建民.機(jī)電一體化系統(tǒng)設(shè)計(jì)[M].4版.北京:高等教育出版社,2014.
[2]孫 桓.機(jī)械原理[M].8版.北京:高等教育出版社,2013.
[3]崔啟坤.機(jī)械腿.中國,實(shí)用新型專利.1035642[P].1989.9.20.
[4]周國雄,晏密英.單片機(jī)應(yīng)用系統(tǒng)設(shè)計(jì)精講[M].北京:中國鐵道出版社,2011.
[5]李仁浩,龔思敏,楊 帆,等.基于單片機(jī)控制太陽能智能跟蹤控制系統(tǒng)的設(shè)計(jì)[J].儀表技術(shù)與傳感器,2015(04):51-53.
The Lower Limb Exoskeleton Booster
WANG Nuo-bin,LI Xiao-dan,LI Jia-xi,LI Zheng-shuai,CHEN Ze-yong
(College of Mechanical Engineer and Automation,Liaoning University of Technology,Jinzhou Liaoning121000,China)
A bionic limb exoskeleton booster was proposed to provide the wearer with the help of the body.This paper introduces the overall mechanical structure and related hardware circuit control scheme of the humanoid assisted mechanical leg,and the corresponding software program is developed.Experiments show that the booster can help reduce the intensity of labor.
bionic power booster;mechanical legs;system design
TP242.3
A
1672-545X(2017)08-0074-02
2017-05-06
王諾彬(1995-),男,內(nèi)蒙古赤峰人,本科在讀,研究方向:機(jī)械電子工程;李曉丹(1982-),女,遼寧盤錦人,副教授,碩士,研究方向:自動(dòng)控制。
猜你喜歡
兒童故事畫報(bào)·發(fā)現(xiàn)號趣味百科(2025年8期)2025-08-23 00:00:00
中學(xué)生天地(A版)(2022年10期)2022-11-23 06:42:50
英語世界(2022年9期)2022-10-18 01:11:18
金橋(2020年9期)2020-10-27 01:59:44
中學(xué)生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
商周刊(2017年17期)2017-09-08 13:08:58
商業(yè)評論(2014年9期)2015-02-28 04:32:41
