應用于物料搬運的電磁式機械手設計
2017-10-21 21:41:17蔡德帥胡笑奇
大東方 2017年12期
關鍵詞:設計
蔡德帥 胡笑奇
摘要:針對工業現場常見的物料搬運等問題,本文進行了物料搬運機器手的設計。首先,分析了抓重、自由度、運動速度等主要參數,確定了利用電磁原理進行重物夾持的搬運方式,然后進行了手部結構的分析,最后確定了線圈匝數等設計參數。
關鍵詞:搬運,機器手
一、前言
在現代工業中,生產過程的機械化、自動化已成為突出的主題。除了加工本身外,還有大量的裝卸、搬運、裝配等作業,有待于進一步實現機械化和自動化。機械手可在空間抓放物體,動作靈活多樣,適用于可變換生產品種的中、小批量自動化生產,在一定程度上能夠取代人力,減小產業工人的勞動強度,提高勞動效率,具有較好的經濟效益和社會效益。
二、總體設計思路
根據一般企業的需求,當所搬運的物體超過30公斤時,將會引起產業工人的疲勞,因此本文將重物搬運至運輸小車上作為設計的目標。本課題采用的坐標系為圓柱坐標系,包括Z軸升降、Z軸回轉、Y軸伸縮,三方向共同作用完成物料搬運。
三、機械手的主要參數
(1)抓重(或臂力)。根據企業設計需要,本文將機械手的抓重設置為80kg。
(2)自由度數和坐標型式。根據以上分析我們設計的機械手為三自由度、圓柱坐標式的簡易輕型工業上、下料搬運機械手。
(3)運動速度。根據可提要求,設計機械手的最大平移速度為 ,最大轉動速度為。為。以此滿足生產需求、節約資源,選擇最佳方案。
(4)行程范圍。本課題要求物料機械手的單向伸縮行程為,回轉角度范圍,X方向行程范圍,Y方向行程范圍。
(5)動作過程及時間分配。設計出機械手大概的動作過程以及時間分配:1)水平伸出需;2)豎直下降需;3)吸取物料需;4)豎直上升需;5)水平收縮需;6)逆向轉動需1s;7)豎直下降需;8)松開物料需;9)豎直上升需;10)順向轉動需1s。
(6)定位精度。機械手精度太低就完不成所需功能,精度太高成本又會增加。位置設定精度及重復定位精度,課題要求機械手定位精度為到之間。
四、手部結構分析與計算
本設計采用電磁式手部結構,其工作原理為,當電磁鐵通電時,電磁鐵電路構成回路,此時電磁鐵具有磁性可以吸起要搬運的工件;當手臂移動到所需要的位置時,此時斷開電磁鐵電路,電路短路,電磁鐵失去磁性同時手部松開工件。
手部吸起工件時所需要的力稱為握力,握力的大小與被夾持工件的重量、中心位置以及夾持工件的方位有關系,將握力假想為作用在過手指與工件接觸面的對稱平面內,并設兩力大小相等,方向相反,以N表示。
電磁式手部握力的計算,只需根據工件的重量進行分析,本設計中機械手的工作方式是手指垂直位置夾緊水平位置放置的工件,并且是平面上吸取物料。所以應選擇的計算公式為:
(1)
式中,M---物料重量(公斤)
g---重力加速度
由
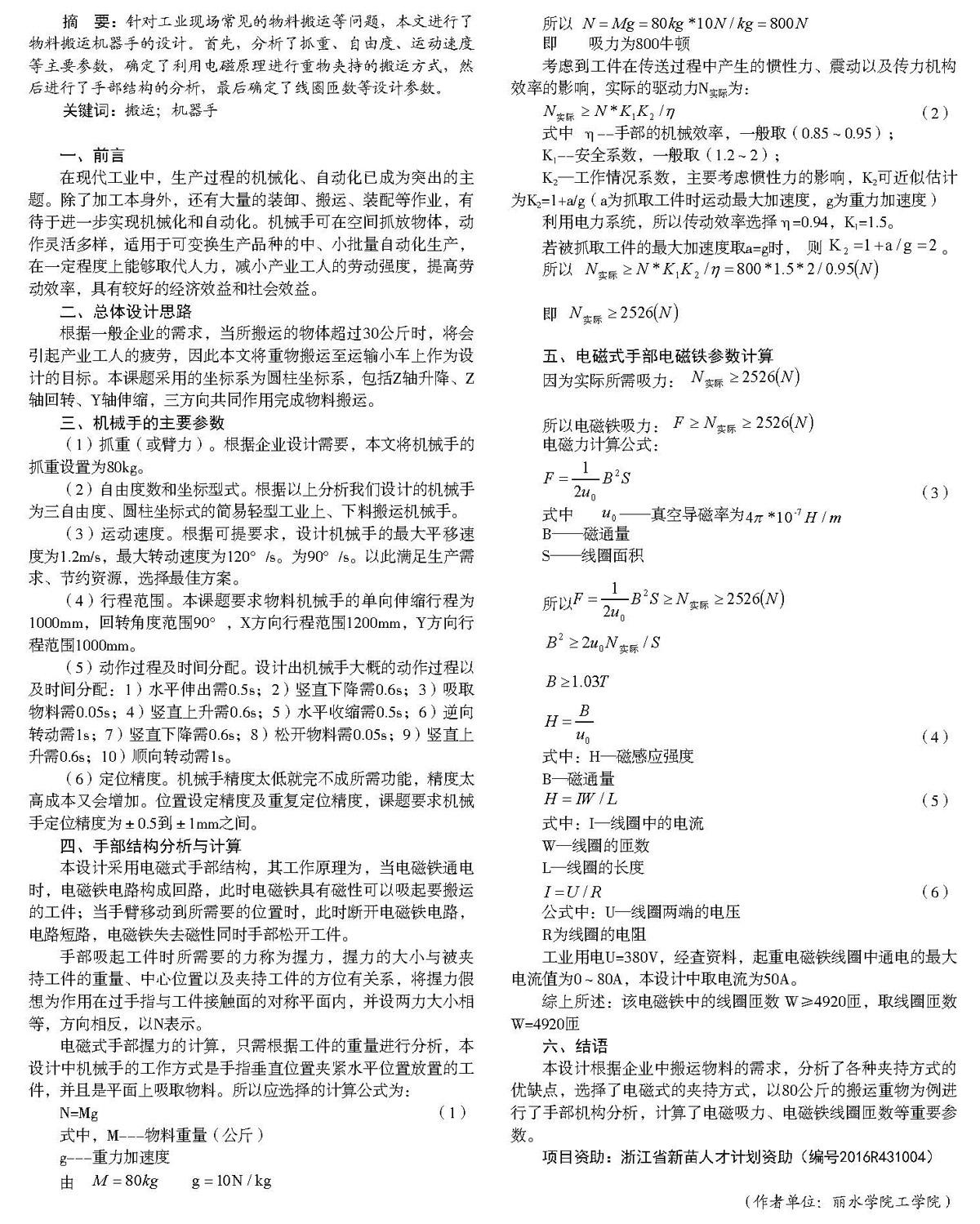
所以
即 吸力為800牛頓
考慮到工件在傳送過程中產生的慣性力、震動以及傳力機構效率的影響,實際的驅動力 為:
(2)
式中 η--手部的機械效率,一般取();
K1--安全系數,一般取();
K2—工作情況系數,主要考慮慣性力的影響,K2可近似估計為(a為抓取工件時運動最大加速度,g為重力加速度)
利用電力系統,所以傳動效率選擇 ,。
若被抓取工件的最大加速度取時, 則 。
所以
即
五、電磁式手部電磁鐵參數計算
因為實際所需吸力:
所以電磁鐵吸力:
電磁力計算公式:
(3)
式中 ——真空導磁率為
B——磁通量
S——線圈面積
所以
(4)
式中: H—磁感應強度
B—磁通量
(5)
式中: I—線圈中的電流
W—線圈的匝數
L—線圈的長度
(3-6)
公式中: U—線圈兩端的電壓
R為線圈的電阻
工業用電U=380V,經查資料,起重電磁鐵線圈中通電的最大電流值為0~80A,本設計中取電流為50A。
綜上所述:該電磁鐵中的線圈匝數 ,取線圈匝數 W=4920匝
六、結語
本設計根據企業中搬運物料的需求,分析了各種夾持方式的優缺點,選擇了電磁式的夾持方式,以80公斤的搬運重物為例進行了手部機構分析,計算了電磁吸力、電磁鐵線圈匝數等重要參數。
項目資助:浙江省新苗人才計劃資助(編號2016R431004)
(作者單位:麗水學院工學院)
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
