一種基于TNY280與PID算法的數控開關電源設計與開發*
2017-11-03 00:46:02雷良育李雪原
電子器件 2017年5期
董 亮,雷良育,劉 兵,李雪原,張 輝
(浙江農林大學工程學院,浙江 臨安 311300)
一種基于TNY280與PID算法的數控開關電源設計與開發*
董 亮,雷良育*,劉 兵,李雪原,張 輝
(浙江農林大學工程學院,浙江 臨安 311300)
開關電源作為一種小體積高效率電源有著越來越廣泛的應用,但大部分傳統開關電源是不可調節的,穩定性較差,為了克服以上缺點,該設計借助STC12C5A60S2單片機采用增量式PI算法對傳統開關電源進行優化設計,開發了一款數控開關電源,其電壓調節范圍為5 V~25 V,最大輸出功率為30 W,具有過載保護功能,輸出穩定,精度較高。
開關電源;可調輸出;PID算法;PWM控制
開關電源自十九世紀八十年代開始發展,到現在已經獲得了較好的應用效果,但仍然存在著精度低、效率低、可靠性差等缺點[1]。傳統直流電源大部分是線性電源,主要采用模擬控制方法,通過比較器、調節器來控制輸出電壓,電源的輸出功率受到了一定的限制,且效率不高,一旦成型將難以更改,不利于集成化[2]。數控開關電源采用數控制技術克服了以上缺點,提高了電源工作的穩定性。本數控開關電源基于TNY280電源芯片,采用STC12C5A60S2單片機作為控制核心進行開發。供電采用220 V交流電源,由按鍵設定所需的輸出電壓,分度值為0.1 V,由采樣電路獲得的輸出電壓和電流反饋給單片機進行PID調節和過載保護。
1 系統總體設計
1.1 系統設計框圖
系統設計框圖如圖1所示。

圖1 系統總體設計框圖
電路主要由整流濾波電路、功率變換電路、單片機控制電路、按鍵電路、顯示電路、輸出電路和采樣電路等組成[3]。依靠硬件電路的設計和改良幾乎無法完成輸出精度的要求,這就需要進行軟件補償,軟件補償的原理是在硬件反饋的基礎上,采用單片機自帶AD模塊進行采樣轉換,經控制器計算分析后,通過PWM形式輸出到功率變換電路進行調節控制,使輸出電壓進一步接近目的輸出電壓。單片機在進行決策時,對輸出電壓與目的輸出電壓進行比較,采用PID算法對PWM信號的占空比進行精確調整,以獲得穩定的直流電壓輸出[4]。
2 硬件電路設計
2.1 單片機控制電路
單片機控制電路如圖2所示。系統由STC12C5A60S2作為主控制器[5],在眾多的51內核單片機中,STC12C5A60S2單片機內部就自帶高達60 K的FLASH ROM,是高速、低功耗、超強抗干擾的經濟型單片機[6],它自帶2路PWM,內部集成8路高速10位A/D轉換[7],滿足該設計的控制要求。單片機控制電路如圖3所示。其主要由STC12C5A60S2單片機、鍵盤輸入電路、按鍵復位電路、時鐘電路與LCD1602液晶顯示電路等組成。在控制器上連接了4個按鍵,分別為設置鍵、加鍵、減鍵、確認鍵,可實現對輸出電壓進行改變的功能。LCD1602液晶顯示器,實時地顯示出當前的輸入電壓、輸出電壓與輸出電流值[8]。

圖2 單片機控制電路圖

圖3 主體電源電路圖
2.2 主體電源電路
主體電源電路如圖3所示。作為電路功率輸出部分,其核心部分主要由TNY280電源芯片、功率變壓器T1、TL431穩壓管等組成。圖3中,TNY280負責AC-DC變換任務,其內部集成了700 V的MOSFET,132 kHz的振蕩器[9]。光耦PC817配合可控穩壓二極管TL431構成精密反饋電路,對主體電源輸出進行調整。T1為多級變壓器,負責主體電源和輔助電源的降壓工作。D10為肖基特二極管,滿足高頻整流工作的需求。C7、C8、C9、C10及L1構成π型濾波電路[10],進一步穩定輸出。TNY280的輸出受控于光耦PC817,而光耦的通導與關斷與可控穩壓二極管TL431相關。因此,通過控制TL431的擊穿電壓,就可以控制該開關電源的輸出電壓。
Uref為TL431的參考極對地電壓,約為2.5 V,無激勵時,其穩壓輸出值Up如式(1):
Up=Uref+(R5/R6)Uref
(1)
PWM輸出對TL431外加激勵電壓UR7,計算修正得TL431的穩壓值Up′如式(2):
Up′=Uref+(R5/R6)(Uref-UR7)
(2)
通過改變UR7的值即可實現對輸出穩壓值的調節。PWM由單片機直接輸出,其調節范圍為0~5 V,經過電阻R8、R9分壓,使得UR7調節范圍為0~2.5 V。
2.3 電壓電流采樣電路
電壓電流采樣電路如圖4所示。R10與R11串聯后并接到輸出端,R11上端電壓值輸出到單片機P1.0口作為電壓采樣值,其分壓比為R11/(R11+R12)≈0.13,C14、C15為抗干擾電容。輸出低電位端串聯電流采樣電阻R12,作為實際輸出的負極,R12把輸出電流值
轉換為電壓值,送入單片機P1.1口,供單片機識別相應的電流值。由于其電阻值較小,僅0.05 Ω,對輸出電壓幾乎無影響,但是采集的電壓較小,需采用LM358運放進行放大,其放大倍數為1+R15/R14=25。

圖4 電壓電流采樣電路圖
3 PID控制策略及實現
3.1 PID控制算法
PID控制算法原理圖如圖5所示。數控開關電源由按鍵設定輸出電壓r(t),給出相應的PWM輸出,對應輸出適當電壓值,此數據通過采樣電路反饋給單片機,單片機采用內部集成的AD進行轉換,得到測量值,與設定值r(t)進行比較得到偏差е(t),再計算出控制量u(t)。最后得到可靠正確的被控輸出量y(t)[11],實時進行微調節。

圖5 PID算法原理框圖
上述的控制規律可用以式(3)表達:
(3)
式中:KP為比例系數;TI為積分時間常數;TD為微分時間常數。
對式(3)進行離散化處理,得到式(4):

(4)
控制量u(k)的每次輸出都與整個過去狀態有關,式中要用到上次偏差的累加值,容易產生比較大的累計偏差,可利用增量式控制算法來實現[12]。由式(4)可得:

(5)
將式(5)-式(4)得:

(6)
該算法只要當前與過往3個時間的偏差值就能計算出控制量和增量,能夠有效避免計算誤差和精度帶來對控制量的影響。
3.2 增量式PI控制算法的軟件實現
由上節對PID控制的原理可得到,忽略其微分分量,則模擬PI控制的式為:

(7)
離散化為:

(8)
式中:KP為比例系數,KI為積分系數,則增量式PI算法表達為:
Δu(k)=u(k)-u(k-1)=KP[e(k)-e(k-1)]+
KITSe(k)=n0e(k)+n1e(k)
(9)
式中:n0和n1為調節參數。依據式(9)實現增量式PID算法流程圖如圖6所示。

圖6 增量式PI算法流程圖
4 系統測試
完成設計制作的數控開關電源。使用數字電壓表、示波器、功率型模擬負載、功率表等儀器儀表設備對設計的數控開關電源性能進行綜合測試。其空載、負載性能測試結果分別如表1~表3所示。

表1 空載性能測試結果
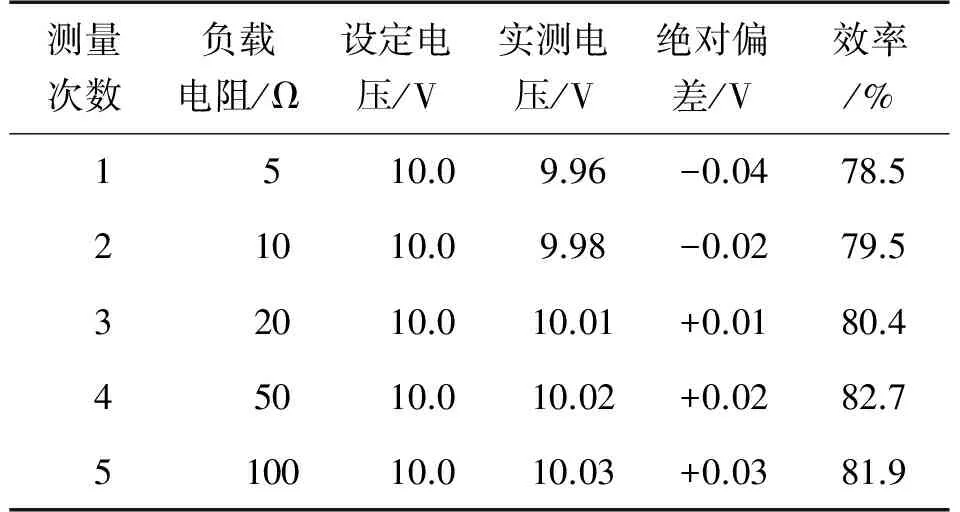
表2 負載性能測試結果1

表3 負載性能測試結果2
5 結論
經過綜合測試,電源輸出電壓步進可調節,輸出波紋較小,運行穩定,無噪音,電源平均工作效率達到80%,且具有過載保護功能,滿足了預先的設計要求。本設計成本低廉,結構輕巧,界面友好,稍加改造,即可應用于自控設備中,應用前景較廣。
[1] 胡興軍. 開關電源(SMPS)技術與市場發展綜述[J]. 電子制作,2005(10):8-11.
[2] 顧星煜,史博文,趙保付,等. 一種新型原邊反饋反激式數字控制LED驅動電源設計[J]. 電子器件,2015(2):291-299.
[3] 司朝良,鐘凌惠. 基于TPS54340的多功能數控電源[J]. 儀表技術與傳感器,2015(7):35-37.
[4] 張亮,莫岳平,江東流. 智能型鋰電池組管理系統設計[J]. 電工電氣,2012(5):24-26.
[5] 王曉亮,孟耀華,尚廷義. 基于GPRS的農業病蟲害圖像無線傳輸系統設計[J]. 廣東農業科學,2013,40(9):182-184.
[6] 莊宣哲,丁東. 機車光電速度傳感器和壓力變送器測試一體機[J]. 科技創新與應用,2014(28):16-17.
[7] 魏榮澄. 三峽樞紐的通信電源[J]. 通信電源技術,2005,22(3):41-43.
[8] 夏桂書. 基于STC單片機的智能電子負載[J]. 實驗室研究與探索,2014,33(3):115-118.
[9] 呂德深,梁承權. 基于STC12C5A60S2與PID算法的數控電源的設計與實現[J]. 電子設計工程,2014,22(9):127-130.
[10] 戚敏敏. 電力儀表開關電源設計[J]. 電氣技術,2008(10):73-74.
[11] 王貴鋒,李峰. 基于單片機控制的開關電源的研究與設計[J]. 自動化與儀器儀表,2014(10):47-49.
[12] 劉凱,張衛平,陳文元,等. 基于DSP的靜電懸浮轉子微陀螺測控系統[J]. 傳感技術學報,2009,22(2):190-194.
DesignandDevelopmentofaDigitalControlSwitchPowerSupplyBasedonTNY280andPIDAlgorithm*
DONGLiang,LEILiangyu*,LIUBing,LIXueyuan,ZHANGHui
(School of Engineering,Zhejiang A&F University,Lin’an Zhejiang 311300,China)
The switching power supply as a small volume,high efficiency power supply is becoming more and more popular,but most of the traditional switching power supply is not adjustable and poor stability. In order to overcome the above shortcomings,a design uses the STC12C5A60S2 MCU and the incremental PI algorithm to optimize the traditional switching power supply,a numerical control switching power supply was developed,its output voltage range is adjustable form 5 V to 25 V. Its maximum output power is 30 W. It has the functions of overload protection,stable output,and high precision.
switching power supply;adjustable output;PID algorithm;PWM control
10.3969/j.issn.1005-9490.2017.05.021
項目來源:2015年杭州市蕭山區引進海外高層次人才“5213”計劃項目
2016-09-02修改日期2016-12-07
TN86
A
1005-9490(2017)05-1156-05

董亮(1990-),男,江蘇溧陽人,碩士,主要研究方向為智能檢測與控制技術,dongliang1990@foxmail.com;

雷良育(1966-),男,湖北蘄春人,博士,教授,主要研究方向為機電檢測與控制技術、新能源汽車控制技術,lly@zafu.edu.cn。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:48:04
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:27
