基于PSD的藥柱位移測試系統的研究
2017-11-03 00:46:06夏忠海任勇峰賈興中郭佳欣
電子器件 2017年5期
夏忠海,任勇峰,賈興中,郭佳欣
(中北大學電子測試技術國家重點實驗室,太原 030051)
基于PSD的藥柱位移測試系統的研究
夏忠海,任勇峰*,賈興中,郭佳欣
(中北大學電子測試技術國家重點實驗室,太原 030051)
榴彈水平發射時會產生高軸向過載環境,推進劑藥柱在此環境中長度收縮變形產生過載位移。而PSD(Position Sensitive Device)是基于橫向光電效應的光電位置敏感器件,具有位置分辨率高,響應速度快,處理電路簡單等優點。就一維PSD位移測量原理和相關特點,以FPGA主控模塊為核心,集信號調理、采集存儲等功能于一體,創新性的設計了傳感器與殼體一體化測量系統。文章就測試系統各個模塊進行了說明并對測量數據進行了處理分析,采用多項式擬合曲線,提高了系統的測量精度;經過高過載實驗,驗證了系統的可靠性和穩定性,為藥柱位移測試評估方法的建立提供了可靠的實驗數據。
PSD;藥柱位移;FPGA;多項式標定;高過載
固體推進劑藥柱是一些增程炮彈的能源動力和主要結構部件,當炮彈處于發射狀態時,藥柱受加速度載荷作用從前端面產生變形伸長[1],伸長量不斷積累導致了尾端面軸向收縮而產生位移,即過載位移。因藥柱的拉伸模量低,過載位移的發生易造成藥柱結構失效破壞,從而會影響炮彈的彈道性能和氣動特性。為了獲取高過載下推進劑藥柱位移數據,建立藥柱位移測試評估方法,需要研制藥柱位移測試系統。
傳統測距法有非光學測量法和光學測量法,因為光學測量法具有測量簡單、測量精度高的特點,被廣泛應用于測距系統中。而PSD是一種基于橫向光電效應的非分割型光電二極管,根據光敏面上接收到光信號轉變為電信號的變化來檢測光點位置。由于其具有很高靈敏度和良好的瞬態響應特性以及緊湊的結構,而廣泛應用于光電位置測量、位移、航空對接和長直導軌檢測等方面[2]。為測量藥柱在發射過載狀態下的軸向過載位移,首次將PSD安置于測量殼體上,設計了抗過載的傳感器與殼體一體化,采集存儲一體化測量裝置,解決了傳統測距方法的安裝特性與測量裝置體積要求之間的矛盾。
1 硬件電路設計
試驗裝置利用了現有的炮彈的彈殼,分別在不同部位對兩個原彈殼進行切割和加工,得到試驗裝置的前殼體和后殼體,將設計的測量裝置,通過抗過載工藝安裝于炮彈內部,分別通過螺紋與前后殼體相連接。
采用火炮水平發射上述試驗裝置,200 m水平直射彈道,經回收后拆解試驗裝置,其中測量要求軸向過載不大于15 000gn,旋轉角速度約為4 000 r/min,過載作用時間約為10 ms量級,根據動態測量參數的要求與研究,設置單通道采樣率為100 ksample/s,硬件方案實現原理框圖如圖1所示。
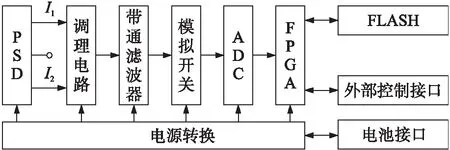
圖1 應變信號采集原理框圖
系統以FPGA主控模塊為核心,完成對每路信號的采集、存儲以及命令的檢測與控制等工作。PSD信號經過帶通濾波器濾波后進入模擬開關輸入端,待選通相應的轉換通道后進行ADC采樣,輸出信號經過打包處理并實時送到FLASH中進行存儲。上位機通過USB讀取存儲器中的數據后進行相應處理并繪制位移圖形,顯示測量位移值。

圖2 一維PSD結構示意及測距原理圖
2 主要模塊設計
2.1 PSD測距原理及安裝特性
PSD工作機理是以PN結的橫向光電效應為基礎的,如圖2所示為一維PSD,P層為光敏層,同時也為導電層,其阻抗均勻分布[3]。當P層被光照射時,由于橫向光電效應,在平行于結平面的方向產生光電流,并被P層兩端的電極收集。
根據PSD的Lucovusky方程[4],當PSD幾何中心設定為坐標原點時,測量位移為

(1)
當PSD一端設定為坐標原點時,測量位移為

(2)
本設計中使用一維PSD-2534型,其光敏感面為一細長結構,有效面積為2.5 mm×34 mm,分辨率為1 μm,最大響應時間為5 μs,響應光譜為380 nm~1 100 nm,為測量方便,將其一端設定為坐標原點,實物圖和安裝圖如圖3所示。

圖3 高精度PSD位置傳感器及安裝
安裝時,在測量裝置表面銑出一個透光槽,將一維PSD位置傳感器敏感面緊貼著細槽,使得另一側的光源發出的光能夠通過透光槽照射至傳感器的敏感面上。當小型炮彈發射時出現瞬間高過載環境,測量裝置中的藥柱在此情況下會因長度收縮而產生過載位移;當出現過載位移前,藥殼上的紅外激光燈因藥柱遮擋而無法通過透光槽照射到PSD上;過載瞬間,過載位移發生,使得紅外激光燈通過透光槽照射于PSD上產生相應的電流信號,同時由于PSD敏感面安裝于裝置內部,通過采集過載位移前后的信號并計算其差值來解決因背景光及暗電流對PSD輸出造成的誤差。
2.2 調理電路模塊
PSD 輸出的信號為電流信號,首先將其轉換成易于處理的電壓信號,為后續信號的方便處理,選用反向I/V轉換電路。
根據上述位移測量方案,測量裝置需要均勻發散的光作為指示光源,均勻光通常可以通過將點光源放于凸透鏡的焦點上來獲取,最終選取RJH-730G-R1型號的紅外LED燈珠作為測量裝置的指示光源,其波長范圍為725 nm~735 nm,根據圖4可知,此時的PSD光電轉換效率約為0.46 A/W。而LED燈珠亮度為160 mW左右,發光角度120°,照射到PSD的有效功率不超過2 mW,故此時PSD各極點電流不到1 mA;后續采用的ADC參考電壓為2.5 V,這樣可知I/V轉換電路放大倍數達到上千倍。

圖4 PSD的光電效率隨波長的變化曲線圖
由于輸入電路的電流非常小,故需要I/V轉換電路中的放大器有較小的輸入偏置電流和輸入零漂電壓、較大的輸入阻抗。同時,設計電路時應該盡量避免用大電阻直接進行轉換,否則會引入較大的噪聲和誤差。基于以上考慮,選用四運放的AD824ARMZ,其失調電壓為0.1 mV,輸入偏置電流為2 pA,失調電壓溫漂2 μV/℃[5],通過兩級放大實現I/V轉換,其中一路信號調理如圖5所示。
圖5中,反饋電容C14的作用是使電路穩定并有約為45°的相位容限,可消除振蕩。
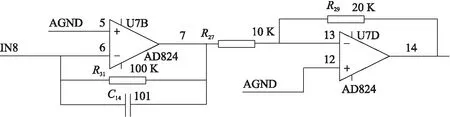
圖5 PSD信號調理電路
2.3 濾波模塊
為了消除各種高、低頻干擾信號,而只保留有效信號,需要設計一個窄帶高速帶通濾波器。因為所有可用的濾波器的機構最后都受到運放帶寬的制約,顯然,盡量減少運放的數目可以達到最高頻率的帶通響應。無限增益多路反饋濾波電路參數計算簡單,網絡元件個數少,不存在正反饋,噪聲較小,穩定性高,因此設計二階無限增益多路反饋(MFB)帶通濾波器對信號濾波。
單位增益帶通濾波器的傳遞函數[6]為
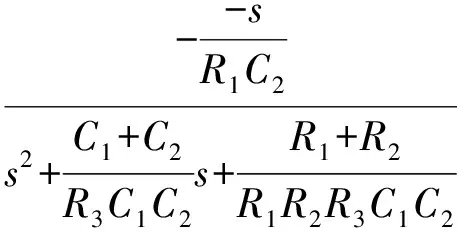
(3)
中心頻率為

(4)
品質因數為

(5)
設膛壓引起藥柱對殼體的應變頻率為5 kHz[7],設置單位增益帶通濾波器的中心頻率fc=5 kHz。因為對于位移量來說,較高頻率(高于5 kHz)的信號對其計算沒有任何的意義,為此設計Q=5,即帶寬BW=fc/Q=1 kHz的窄帶帶通濾波器。查閱二階MFB帶通濾波器設計用表[8]選擇C1=C2=0.01 μF,根據電阻換標系數公式

(6)
得換標系數K=2。
查表可得歸一化電阻值,r1=7.958 kΩ,r2=0.162 kΩ,r3=15.915 kΩ。對歸一化電阻值分別乘以電阻換標系數得R1=15.916 kΩ,R2=0.324 kΩ,R3=31.83 kΩ,根據標稱電阻值得實際選用電阻為R1=16 kΩ,R2=324 kΩ,R3=31.6 kΩ,所設計帶通濾波器如圖6所示。

圖6 二階MFB帶通濾波器
通過Multisim 14.0建立MFB濾波器的仿真圖,并用AC Analysis分析觀測電路的幅/相頻特性,如圖7所示,可以看出其帶寬為5.6 kHz-4.6 kHz=1 kHz,且具有很強的頻率選擇性。
2.4 采集存儲模塊
在采集信號經過模擬開關ADG706時,由于運放AD8608驅動容性負載能力有限,約為200 pF,為防止采集信號發生過沖和振蕩[9],在AD8608后加一小電阻,經過Multisim 14.0仿真和實驗表明當其驅動容性負載為1 000 pF左右時,選用電阻為100 Ω(圖6R47)時能很好的改善過沖的發生。
信號采集傳輸鏈路中,AD建立時間將對采樣頻率與采樣精度產生影響,故其建立時間必須足夠快,以確保轉化誤差最小化,設計中采用AD8011。為使得采集系統在不降低采樣精度的前提下,優化采樣時序[10]。一般采樣時,先切換模擬通道,在等待模擬開關穩定之后再進行AD轉換,待完成數據轉化,再次切換模擬開關進入下一通道采集。而采用先采樣后切換模擬開關的模式,使模擬開關及跟隨運放的建立時間在AD轉化過程中實現。如圖8所示,這樣能使模擬開關及跟隨運放的建立時間的開銷完全在轉換過程中完成,從而保證了模數轉換前此通道信號的穩定,且模擬開關和跟隨運放不會對信號轉換產生額外的誤差。

圖7 交流分析法得到的幅/相特性曲線

圖8 優化采集模擬開關切換時序產
圖8中,Covst為采集控制信號,Addr為模擬開關地址,Wrfifo為寫FIFO信號,Data為采集數據。
在采集狀態下,對采集輸出信號進行打包,并將實時數據寫入到存儲模塊中,存儲單元選用選用MICRON公司的 MT29F64G08AFAAA,容量為8 Gbyte的NAND FLASH芯片。采用交替雙平面頁編程方式,存儲速率能夠達到 29.85 Mbit/s。為了能安全、可靠存儲,采用兩片Flash進行數據存儲,從時間上看兩個數據流同時流入兩片Flash中,相當于數據總線增加了一倍,數據存儲速率能夠達到單片Flash存儲速率的兩倍。雙備份的存儲模式保證對每路數據源的可靠存儲。
2.5 系統供電模塊
高過載測量的特殊環境決定了采集存儲裝置設計的難度,而高過載過程中能否對采集存儲裝置進行可靠的供電,保證整個高過載測量過程的進行成為了試驗成功的非常重要因素。針對現有高過載電子記錄裝置的供電模塊在瞬態高過載時無法實現不間斷供電的問題,設計了一種組合互補式瞬態高過載不間斷供電模塊,如圖9所示。

圖9 組合互補式瞬態高過載不間斷供電模塊
設計中Li電池正極通過二極管與充電輸入接口相連,兩組銀鋅電池為備份電池組,供電電池組與備份電池組在殼體內按不同軸向放置。在受到瞬態高過載時,由于電池組的安裝方式與選擇的電池種類不同,故其在殼體內斷電或損壞的特性與時間也是不同的,從而形成了互補式的供電拓撲,保證了電子記錄裝置在高過載時的不間斷供電。
若連接電池組二極管的負端突然斷開或與地短路,此時儲能電容C57、C58將存儲能量繼續供給芯片。若設定瞬態高過載時,電路掉電時間t最大為2 ms,實驗測試電路電流40 mA,LT1763-5最低工作電壓為Vpm為5.5 V,電池組供電電壓Vs為8.4 V,RB551V-30壓降為0.36 V,供電電路截止工作電壓為
Vm=Vpm+VD8+IR52
(7)
正常供電電壓為
Vw=Vs-VD3
(8)
儲能電容保持期間的電能為

(9)
瞬態供出的電能為
(10)
由能量守恒即式(9)與式(10)相等得
(11)
計算得C為46.2 pF,選用107的電容可滿足實際需求,同時滿足侵徹時間更長的需求。

圖10 采集數據打包存儲幀格式
3 上位機設計
上位機軟件設計采用自頂向下、逐步細化的模塊化設計。主要完成試驗測試電路的參數設置以及裝置回收后存儲器中數據的讀取、保存和波形顯示。首先,無紅外激光燈照射時對處理器進行初始化,根據A/D采樣時序,啟動A/D 轉換,采集PSD暗電流輸出值并保存。紅外激光燈照射PSD 后,采集到PSD的輸出值減去保存的暗電流輸出值,并繪制位移波形圖,顯示光點移動的位移即藥柱過載位移值,從而避免了暗電流對PSD輸出的影響。上位機讀取打包的數據如圖10所示。
4 系統非線性校正
位移標定試驗示意圖如圖11所示,使用鋁柱模擬藥柱的位移情況,其表面顏色與直徑都與實際藥柱保持一致,測量裝置靠近PSD的一端內壁涂抹黑色吸光材料,以減少因反射光給測量帶來額外的誤差,標定蓋與上述壓力標定時預留的安裝螺紋連接,其表面刻有角度,螺桿螺紋為M8×1.25,桿上做有標記以便與標定蓋上的角度對應,則螺桿每相對標定蓋旋轉360°,鋁柱的位移為1.25 mm,通過控制螺桿旋轉的角度即可精確控制鋁柱的位移量。
根據系統測試及式(2)推得位移計算值為

(12)
將實際位移Y、計算位移X和PSD兩極電流信號采集數字量為WY1、WY2填入表1中。

圖11 位移標定試驗圖
表1中未列出位移2.5 mm以下測量值,因采集紋波及兩電流信號調理電路不完全對稱等因素影響,2.5 mm以下測量失真,而在測量裝置應用背景下,藥柱在6 000 g~12 000 g的發射軸向過載環境下,藥柱端面位移量應在幾毫米乃至十幾毫米,因此標定位移范圍選擇2.5 mm~30 mm完全滿足設計要求。

表1 測試數據記錄表
將計算位移X和實際位移Y擬合曲線如圖12所示,將計算位移X代入擬合公式中可計算出標定位移Y1并將其填入表1中。

圖12 計算位移與實際位移擬合曲線圖
多項式擬合誤差為[11]

(13)
式中:Δ=|Y1-Y|max,Y1為擬合輸出的標定位移,Y為實際位移,Rm為PSD滿量程位移,計算式(13)得
最大擬合誤差為0.479%,也表明了PSD系統輸出的非線性誤差。采用多項式擬合曲線來標定數據,使得標定曲線與PSD輸出特性保持一致,提高了系統的測量精度。
5 實驗驗證
為模擬藥柱的瞬間高過載,使用SY10-100液壓沖擊試驗臺,試驗標準為GB_T2423_5,標準脈沖寬度0.30 ms,沖擊高度800 mm,沖擊采樣頻率192 kbit/s,采樣時間1 600.00 ms,實際操作如圖13所示。
圖13(b)為采集的高軸向過載模擬藥柱的過載位移,其中WY1和WY1為采集到的兩路PSD位移信號,WY經過式(12)計算后繪制出的位移波形,縱軸表示位移(單位mm)。經過多次沖擊試驗,波形都很好地測試出了過載脈沖寬度和藥柱瞬間的過載位移,從而驗證了系統的穩定性與可靠性。

圖13 11 000 gn軸向過載模擬藥柱過載位移
6 總結
為測量藥柱在發射過載狀態下的軸向過載位移,將PSD安置于殼體上,設計了傳感器與殼體一體化測量系統,文章就測量系統各個模塊進行了詳細說明分析,并通過仿真驗證了理論設計。采用PSD測量位移,對采集數據作了詳細處理分析,經過標定,提高了系統的測量精度。最后模擬裝藥發射過載環境下的測試,結果表明,測量系統在高過載條件下穩定可靠,為推進劑藥柱位移測試評估方法的建立供了可靠的原始檢測數據。
[1] 朱衛兵. 固體火箭發動機藥柱結構完整性及可靠性分析[D]. 哈爾濱:哈爾濱工程大學,2005.
[2] 劉劍鋒. PSD定位理論及其在引信中的應用研究[D]. 南京:南京理工大學,2002.
[3] 李曠野. 基于PSD的高精度位移傳感器的研究[D]. 長春:長春理工大學,2010.
[4] 宋殿友. 精密PSD微位移在線測量技術的研究與應用[D]. 天津:天津大學,2012.
[5] AD824 Single Supply,Rail-to-Rail Low Power FET-Input Op Amp InData Sheet[R],2003.
[6] 約翰遜D E. 有源濾波器精確設計手冊[M]. 第1版. 北京:電子工業出版社,1984:138-139.
[7] 李政清. 微小型電容式壓力測試儀的研究[D]. 太原:中北大學,2012.
[8] 塞爾吉歐·佛朗哥. 基于運算放大器和模擬集成電路的電路設計[M]. 第3版. 西安:西安交通大學出版社,2009:121-123.
[9] 張傳民. 某彈載多通道數據采集系統的研究與設計[D]. 太原:中北大學,2015.
[10] Chu Chengqun,Ren Yongfeng,Liu Xin,et al. An Efficiency Multiplexing Scheme and Improved Sampling Method for Multichannel Data Acquisition System[J]. International Journal of Distributed Sensor Networks,2015,2015:.
[11] 費業泰. 誤差理論與數據處理(第6版)[M]. 北京:機械工業出版社,2010:55-56.
ResearchoftheGrainDisplacementMeasurementSystemBasedonthePSD
XIAZhonghai,RENYongfeng*,JIAXingzhong,GUOJiaxin
(National Key Laboratory for Electronic Measurement Technology,North University of China,Taiyuan 030051,China)
It will produce high axial overload environment when the grenade launches in a horizontal state,and the propellant grain length contraction deformation will lead to the generation of overload displacement in this environment. The Position Sensitive Device based on the lateral photoelectric devices of the photoelectric position is sensitive,and it has a high position resolution,fast response,simple processing circuit,etc. In this article,discussing the principle of one-dimensional PSD displacement measurement and its related features,the FPGA master control module is taken as the core to set signal conditioning,acquisition and storage functions in one,and innovates on design of the integrated measuring system of sensor and to housing. The paper discusses the test system modules,processes and analysis of innovation on the measurement data at the same time,the polynomial fitting curve is adopted to improve the measurement accuracy of the system. From the high overload test experiment the system is reliability and stability. It provides a reliable experimental data for the establishment of the evaluation method of the displacement of the grain.
PSD;grain displacement;FPGA;polynomial calibration;high overload
10.3969/j.issn.1005-9490.2017.05.028
2016-07-05修改日期2016-07-06
TP274
A
1005-9490(2017)05-1196-08

夏忠海(1989-),男,山西朔州人,山西省中北大學儀器與電子學院碩士研究生,主要研究方向為電路與系統,hai7029@163.com;

任勇峰(1968-),男,山西中陽人,教授,博士生導師,主要從事動態測試、彈載固態記錄器等方面的研究;

賈興中(1984-),男,硬件工程師,從事電路與系統研究;

郭佳欣(1992-),女,碩士研究生,從事測試計量技術與儀器的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
