位移傳感器數據高精度采集電路設計*
2017-11-03 00:46:06欒紅民李玉霞吳慶林曲云昭
電子器件 2017年5期
張 斌,欒紅民,李玉霞,吳慶林,王 晶,曲云昭
(1.中國科學院長春光學精密機械與物理研究所,長春 130033;2.中國科學院大學,北京 101400)
位移傳感器數據高精度采集電路設計*
張 斌1*,欒紅民1,2,李玉霞1,吳慶林1,王 晶1,2,曲云昭1,2
(1.中國科學院長春光學精密機械與物理研究所,長春 130033;2.中國科學院大學,北京 101400)
對位移傳感器數據進行高精度采集是實現大型望遠鏡主鏡位置監控的關鍵環節。詳細分析了位移傳感器數據采集電路的輸入需求并依此設計硬件電路。將位移傳感器信號經過縮放、濾波等調理后輸入至ADC芯片ADS1259完成A/D轉換;使用DSP芯片TMS320F28069讀取ADS1259輸出的數字信號,解碼后發送給PC機進行處理與顯示。同時設計了CAN總線接口,用來實現分布式采集電路組建局域網。經過測試,采集電路的有效分辨率可達到17 bit,位移采集誤差小于2 μm,相對誤差小于0.01%,能夠實現對位移傳感器信號的高精度采集,為望遠鏡主鏡監控提供保證和依據。
位移傳感器;數據采集;信號調理;CAN;望遠鏡
望遠鏡是進行深空觀測與天文研究的最重要的、最基本的工具,其口徑越大,集光能力越強,分辨能力越高[1]。在大型望遠鏡系統中,主鏡是整個主光學系統的基準[2],主鏡與鏡室的位置關系穩定是保證光學成像質量的前提,所以需要對主鏡的位置進行實時監控。主鏡位置通過X、Y、Z、θX、θY、ΔR共6個自由度描述,這 6個自由度的獲得需要通過安裝在主鏡底部與側部的6個位移傳感器的數據進行解算得出[3],圖1為位移傳感器布局示意圖。因此對位移傳感器的數據采集是實現主鏡位置監控的關鍵環節與前提,其準確與否直接影響解算出的主鏡位置的準確性,進而影響對主鏡位置的監控,影響大望遠鏡的成像質量。

圖1 位移傳感器布局示意圖
針對大型望遠鏡主鏡位置監控的需求,設計位移傳感器數據的高精度采集電路。位移傳感器采用NovoTechnic公司的F205-1g型位移傳感器,其線性量程為-2.5 mm~+2.5 mm,靈敏度為4.5 V/mm,輸出差分電壓信號,幅值在-11.25 V~+11.25 V之間;根據望遠鏡主鏡相對鏡室發生位移的特點,位移傳感器輸出的信號能量主要在幾百赫茲以下,屬于低頻信號,但是受到的干擾特別強,如主鏡支撐結構的震動所造成的干擾、工頻干擾以及信號接地不良所引起的干擾等[4]。所以,設計位移傳感器數據采集電路主要實現以下功能:對信號進行縮放與濾波,將其從噪聲中提取出來并滿足ADC輸入的幅值要求;然后輸入至ADC芯片完成A/D轉換過程;此外采用DSP處理器對轉換后的數字信號進行讀取與處理。
1 總體設計
因為要對主鏡上6個位置的位移信息進行采集,所以采集電路的設計有兩種方案:其一,設計多通道數據采集電路,然后通過長導線連接至位移傳感器;其二,設計單通道的數據采集電路,分別與每個位移傳感器就近連接,然后利用總線技術將分布式采集電路組網。方案一使用一套PCB板即可,但是位移傳感器與采集電路之間的長導線受外界影響會引入噪聲,影響測量結果[5];此外位移傳感器輸出電壓信號,經過長距離傳輸產生的衰減也會造成測量誤差。方案二需要使用6套采集電路,成本較高,但是位移傳感器與采集電路之間的連線短,布線簡單,而且引入的噪聲較方案一大幅度降低,測量結果更為精確。綜上,采用第2種方案進行設計,即設計單通道的位移傳感器數據采集電路,然后利用總線技術組網實現主鏡6個自由度位移信息的測量。
有多種總線可實現局域網組建,本文主要分析3種總線技術:以太網、RS485以及CAN總線。以太網支持TCP/IP的一系列協議,其中的TCP協議設計成熟,使用廣泛,可以10 Mbit/s的速率進行數據傳輸,并且能夠糾錯檢錯保證可靠性。但是TCP協議傳輸的每條信息都需要附加至少70 byte的幀頭[6],而在本文所設計的采集電路中,大部分信息都在4 byte~8 byte之間,使用TCP協議組網的效率會非常低下。RS485總線采用差分格式傳輸信息,通信距離長,支持多點通信。但是RS485總線沒有標準的通信協議與糾錯檢錯機制,需要自定義,可靠性不高;而且由于RS485采用主機輪詢、下位機應答的機制解決數據沖突的問題,實時性不高,效率較低[7-8]。CAN總線又稱局域控制網,節點不分主從,采用優先級方式仲裁總線,自帶校驗檢錯功能,一般使用雙絞線進行傳輸,布線簡單而且可靠性高,其最高速率可達1M/s,實時性比較高[5,9]。綜合考慮,本文選取CAN接口進行組網設計。
對于位移傳感器輸出的差分信號,有兩種方式對其進行濾波:(1)對差分信號線上的兩路信號分別濾波;這種方式簡單易行,但是要求兩路信號上的濾波環節中的各元件參數嚴格匹配,否則會使差分線上的兩路信號產生相位以及幅值上的偏差,從而產生測量誤差。(2)將差分信號轉換為單端信號,然后濾波;該方法雖然額外加入了差分轉單端的環節,但是能夠較好的實現信號的濾波,并且不會引入方式1中產生的測量誤差。本文采用第2種方式進行濾波。
綜上所述,設計位移傳感器采集電路原理框圖如圖2所示。基本思想是調理電路部分使用儀表放大器接收位移傳感器信號,實現差分至單端的轉換;轉換后的單端信號經過低通濾波器后由差分放大器轉換為差分信號輸入至ADC芯片轉換為數字信號;使用DSP芯片F28069作為處理器接收ADC輸出的數字信號,解析后通過RS422接口發送給PC機;設計CAN總線接口用來實現分布式采集電路的組網。
2 電路設計
2.1 信號調理與轉換電路
信號調理與轉換電路由前置電路、濾波電路、ADC轉換電路以及ADC參考電源電路構成,具體如圖3所示。

圖3 信號調理與轉換電路原理圖
根據佛里斯公式可知,前置電路的噪聲系數對系統的總噪聲系數影響最大,故要求前置電路必須噪聲小、增益穩定、抗干擾能力強[10]。采用低噪聲儀表放大器AD8221接收位移傳感器輸出的差分信號,實現差分至單端的轉換。RG端開路,設置為單位增益,可使其具有80 dB以上的共模抑制能力,能夠抑制傳感器與電路之間長導線拾取的共模噪聲。電路前端采用阻容式射頻濾波器,抑制射頻噪聲,防止其破壞測量結果,同時也在測量帶寬內維持了較高的輸入阻抗,避免增加信號源的負載。將差分信號轉換成單端信號后,為了滿足ADC的量程,使用ADA4004設計反相放大器,增益為0.2,使信號縮放至ADC的輸入幅值要求范圍內。
為了限制噪聲帶寬并避免混疊,設計低通濾波電路將信號從噪聲中提取出來。因為Butterworth 濾波器通帶內的幅頻響應曲線非常平坦,能保證采集器精度,所以本文設計Butterworth低通濾波器實現濾波功能。理論上說,低通濾波電路階數越高,濾波的效果越好。但是考慮到階數增高帶來的設計與調試問題,本文選擇二階低通濾波。圖3中所示為2極點單位增益Sallen-Key濾波器[11],相關公式如下:

(1)

(2)

(3)
經過計算,可得到該濾波器的截止頻率大約為1 kHz,Q值為0.71。該濾波器僅允許目標頻率通過,從而防止ADC對混疊頻率進行采樣;同時,在單位增益的Sallen-Key濾波器中,運算放大器被用作單位增益緩沖器,使其具有高增益精度,提高信號采集質量。
ADC芯片是采集電路的核心器件,其性能將對系統精度產生重大的影響。選用24位ADC芯片ADS1259進行數據轉換;ADS1259具有高達14 ksample/s的可配置采樣速率,內部集成了Δ-Σ調制器,具有出色的噪聲抑制性能和線性特性[12]。ADC采用全差分輸入設計,不僅具備良好的共模噪聲抑制特性,同時也可以將二次失真改變為共模噪聲進行抑制;使用差分放大器AD8476作為驅動芯片將單端信號轉換為差分信號輸入至ADC。ADC的參考輸入采用ADR431基準電壓芯片提供,相對于ADC芯片的片上基準,ADR431具有更小的噪聲,更高的精度和穩定性;因為ADS1259參考輸入端內部沒有緩沖器,所以外接運放OPA227提高參考電壓的驅動能力。轉換后的數字信號通過SPI接口輸出。
2.2 DSP處理電路
選擇C2000系列DSP芯片F28069作為處理器,實現數字信號的讀取與解析以及與PC機通信和組網等功能,電路框圖如圖4所示。

圖4 DSP處理電路結構圖
DSP通過SPI總線和ADS1259通信,對其進行功能配置以及數據讀取;通過RS422總線與PC機通信;通過I2C總線與片外存儲器24C512通信,對關鍵配置數據與位移數據進行存儲;利用CAN總線實現分布式采集電路組網,各CAN網絡節點在數據傳輸時報文的優先級通過讀取撥碼開關進行配置,同時,利用報文的優先級來表征各CAN網絡節點的地址編號。
A/D采集是一個非常復雜的問題,要有效去除干擾,除了合理的原理圖設計,也要考慮硬件電路的布局布線,例如去耦電容盡量靠近電源引腳、模擬地與數字地分割等[13]。
3 DSP軟件設計
DSP軟件通過搭建前后臺系統,實現采集與通信功能,流程如圖5所示。

圖5 DSP軟件流程圖
初始化過程包括外設接口初始化以及ADS1259初始化;其中,CAN接口的ID設置需要讀取撥碼開關確定,CAN接口配置完成后,進行自檢測,判斷本節點是否正常;ADS1259初始化包括工作條件設置、工作模式設置以及偏置校正與增益校正設置,配置完畢后,從ADC芯片讀回配置數據,判斷是否正確寫入,并將配置數據通過I2C接口發送至24C512供主控制器查詢。
ADS1259在每次數據采集完成后,向DSP發送外部中斷信號,DSP在外部中斷中通過SPI接口讀取采集數據,并校驗與解析,若校驗正確,將數據通過SCI接口發送至PC機進行顯示。解析過程依據表1所示的數據格式實現。

表1 傳感器數據格式
CAN網絡通信以廣播的形式進行,各節點收到報文后,組織數據包發送;數據包分為位移傳感器數據以及節點工作狀態數據兩種,根據解析后的報文選擇發送給主控制器;若CAN接口出現通信故障,在CAN錯誤中斷中重新進行初始化,復位CAN控制器,使錯誤節點盡快恢復總線通信。
此外,軟件設計中配置一個定時器,用來監測各外設接口的狀態寄存器,若檢查到有錯誤發生,則重新初始化該接口。
4 測量結果及分析
設計完成后進行了實驗測試,包括CAN接口測試與采集性能測試。CAN接口測試通過使用周立功公司的USBCAN適配器與PC機通信進行;測試中CAN接口通信正常,能夠實現組網功能。采集性能是測試的核心部分,主要從兩個角度進行考察:精密性以及正確性,其中,精密性表明測量結果的分散程度即測量中隨機誤差的大小,正確性表明測量結果偏離真值大小的程度即測量中系統誤差的大小[14]。
因無法精確獲得位移傳感器伸縮的位移量,所以測試時將位移傳感器固定后,使用FLUKE公司的數字精密臺式萬用表采集其輸出電壓作為采集電路的參考;該萬用表型號為8846A,測量精度為0.002 4%。
4.1 測量結果
將位移傳感器伸縮至不同位移量,固定好后使用8846A型臺式萬用表測量,其值作為位移傳感器實際輸出電壓值;使用采集電路采集1 000次求平均后作為測量值。測量數據如表2所示。

圖6 測量曲線
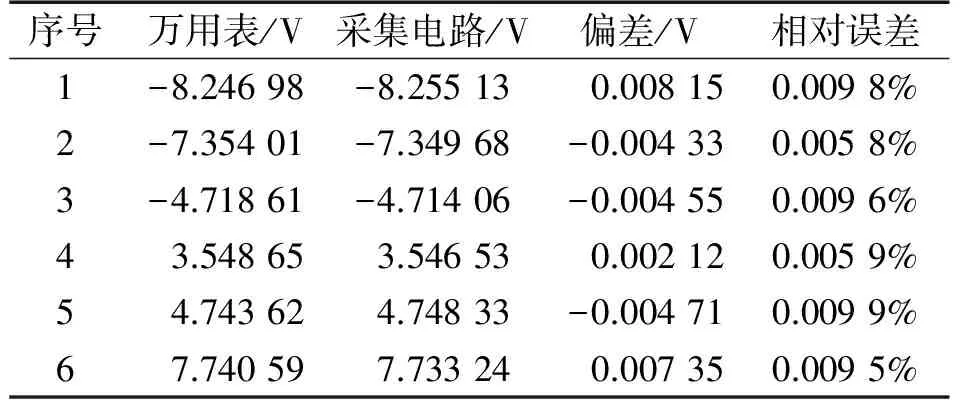
序號萬用表/V采集電路/V偏差/V相對誤差1-8.24698-8.25513 0.008150.0098%2-7.35401-7.34968-0.004330.0058%3-4.71861-4.71406-0.004550.0096%43.548653.546530.002120.0059%54.743624.74833-0.004710.0099%67.740597.733240.007350.0095%
由表2可以看出,采集電路測量值與萬用表測量值的偏差小于10 mV,折算成位移誤差小于2 μm,相對誤差小于0.01%。圖6分別是測量值為7.733 24 V與-4.714 06 V時的測量曲線,采集頻率為100 Hz,采集時間為10 s。可以看出,數據波動小于0.2 mV,即采集電路可達到17 bit的穩定分辨率。綜上,采集電路具有良好的精密性與正確性,可以滿足大型望遠鏡主鏡位置監控的需求。
為了測試采集電路本身所帶來的噪聲,將位移傳感器差分信號輸入接口短接,測量結果如圖7所示。可見,采集電路內部噪聲小于30 μV。
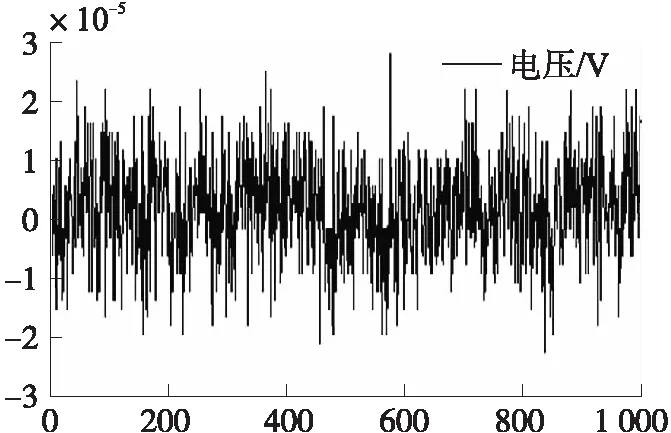
圖7 采集電路內部噪聲曲線
4.2 誤差來源分析
在實驗測試中發現,主要有以下因素會造成采集誤差:
(1)溫度因素 所使用的位移傳感器的溫度漂移特性為0.45 mV/℃,該因素對長時間測量時引起的誤差較為明顯,所以測量結果需要在后續數據處理中進行溫度校正;
(2)測試時人員走動等因素造成測試平臺的振動也會引起一定的誤差。
(3)此外,經過分析,位移傳感器本身特性,例如靈敏度、線性度等也會對測量結果產生影響;其中傳感器的靈敏度系數的重復性對測量誤差的影響較為明顯,呈線性趨勢,應在使用時對位移傳感器進行標定。
需要說明的是,本文中的測試過程產生的誤差不包含機械因素引起的誤差,如位移傳感器的安裝誤差以及調零誤差、望遠鏡主鏡支撐結構的裝調誤差等。而這些因素在本電路使用時是必須要考慮的,應保證每個環節的安裝誤差小于測量誤差要求的10%。
5 總結
針對大型望遠鏡主鏡位置監控的需求,設計位移
傳感器數據采集電路。經過分析,采取利用CAN總線將分布式采集電路組網的方案實現主鏡6個自由度位置信息的測量。采集電路將差分信號轉換為單端信號,經過縮放與濾波后再轉換為差分信號輸入至ADS1259實現A/D轉換;采用TMS320F28069實現數字信號的讀取與解析,以及相關接口通信。測試結果表明,本電路的有效分辨率達到17bit,位移采集誤差小于2 μm,相對誤差小于0.01%,可以應用于大型望遠鏡系統中,為主鏡位置監控提供依據和保證。
[1] 程景全. 天文望遠鏡原理和設計[M]. 北京:中國科學技術出版社,2002:8-16.
[2] Hovsepian T,Michelin J L,Stanghellini S.Design and Tests of the VLT M1 Mirror Passive and Active Supporting System[J]. SPIE,1998:424-435.
[3] 李玉霞,劉昌華,王建立,等. 大型望遠鏡主鏡位姿解算與檢測系統設計[J]. 電子測量與儀器學報,2015,29(5):766-774.
[4] Scott Ellington. Disturbance Rejection of the WIYN Telescope Position Control Servo System[J]. SPIE,(2479):278-288.
[5] 宋全偉,甄國涌,劉東海. 基于 CAN 總線的多通道數據采集系統設計[J]. 電子器件,2015,38(5):1076-4080.
[6] 劉彬. 工業以太網性能測試與組網優化[D]. 杭州:浙江大學,2010.
[7] 宋躍,楊雷,雷瑞庭,等. 基于ARM9 與LINUX的RS485總線的通信接口設計[J]. 儀表技術與傳感器,2014(5):35-37.
[8] 凌國平,周新建. 如何提高測控系統中 RS485通信的可靠性[J]. 傳感技術學報,2005,18(8):470-471,476.
[9] 李平,魏長寶. CAN總線檢測系統的多接口設計研究[J]. 電子器件,2015,38(4):917-921.
[10] 于向前,陳鴻飛,鄒鴻,等. 極微弱準直流電流信號測量電路的設計[J]. 儀表技術與傳感器,2015(8):62-64.
[11] 官泳華. 基于MEMS的電容式傳感器信號調理電路設計[J]. 電子器件,2016,39(3):551-557.
[12] 秦曉霞,高艷,余輝洋. 一種寬量程氣壓傳感器的接口電路設計與測試標定[J]. 傳感技術學報,2015,28(3):320-324.
[13] 郝曉明,李杰,黃玉崗. 基于ADS8568的八路數據采集系統設計[J]. 傳感技術學報,2016,29(1):150-154.
[14] 陶紅艷,余成波. 傳感器與現代檢測技術[M]. 北京:清華大學出版社,2010:10-18.
DesignofHighPrecisionDataAcquisitionCircuitofDisplacementSensor*
ZHANGBin1*,LUANHongmin1,2,LIYuxia1,WUQinglin1,WANGJing1,2,QUYunzhao1,2
(1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China;2.University of Science Academy of Sciences,Beijing 101400,China)
High precision acquisition of displacement transducer data is the key link to realize the position monitoring and controlling of the primary mirror of large telescope. Input requirements of the acquisition circuit,according to which hardwares are designed,are analyzed in detail. The displacement transducer signal is conditioned by scaling and filtering,then inputs to the ADC chip ADS1259 to realize A/D conversion. DSP chip TMS320F28069 is used to read the digital data output by ADS1259,and to sent them to PC for processing and display after decoding. Meanwhile,the CAN bus interface is designed to establish the LAN between distributed acquisition circuit. After testing,the effective resolution can reach 17 bit,and acquisition displacement error less than 2 μm,the relative error is less than 0.01%,the acquisition circuit could collect the displacement transducer signal with high precision,and provides the guarantee and foundation for the telescope primary mirror monitoring and controlling.
displacement transducer;data acquisition;signal condition;CAN;telescope
10.3969/j.issn.1005-9490.2017.05.029
項目來源:中國科學院長春光學精密機械與物理研究所重大創新項目專項基金項目(Y3C122E130)
2016-07-17修改日期2016-09-06
TN710
A
1005-9490(2017)05-1204-05

張斌(1981-),男,通信作者,漢族,吉林省長春市人,副研究員,碩士研究生導師,博士,主要研究方向為光電望遠鏡伺服控制技術、主動光學控制系統,13844908289@163.com;

欒紅民(1987-),男,漢族,吉林省洮南市人,長春光機所碩士研究生,主要從事電子學設計及精密跟蹤控制方向的研究,luanhongmin2016@163.com。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
