一種基于四元十字麥克風陣的聲源定位算法*
2017-11-03 00:46:08王青云
電子器件 2017年5期
關鍵詞:信號
王 永,王青云
(1.徐州工業職業技術學院信息與電氣工程學院,江蘇 徐州 221140;2.南京工程學院通信工程學院,南京 211167)
一種基于四元十字麥克風陣的聲源定位算法*
王 永1*,王青云2
(1.徐州工業職業技術學院信息與電氣工程學院,江蘇 徐州 221140;2.南京工程學院通信工程學院,南京 211167)
實現了一種基于四元十字麥克風陣列的聲源定位系統。選取四元十字陣作為麥克風陣列的陣型,推導了基于四元十字麥克風陣列的聲源定位算法的公式。針對傳統互相關時延估計算法在低信噪比、混響大的環境下魯棒性較差的問題,系統采用廣義互相關算法來進行定位的時延估計,并使用Cortex-A8嵌入式平臺實現了魯棒的聲源定位系統。
麥克風陣列;聲源定位;嵌入式系統
麥克風是最簡單的語音信號采集設備,是語音信號處理系統的入口。隨著技術的發展以及人們的需求日益增長,單個麥克風已經不能滿足現代語音信號處理系統的需求[1]。如果改變聲源位置,就需要重新選擇麥克風的位置,以拾取較高質量的信號;環境中的噪聲和混響都會大大降低單麥克風采集信號的質量,影響處理的效果。因此,用多個麥克風組成的陣列來處理語音信號的技術[2]3]受到了人們的廣泛關注與重視。目前,麥克風陣列主要應用于遠程電話會議[4-5]、語音識別[6-7]、機器人聽覺[8]、汽車環境中語音拾取[9-10]、回響環境中聲音拾取[11-12]、大房間中的會議錄音[13]和助聽設備[14]等。
聲源定位技術在基于麥克風陣列的語音信號處理中處于核心地位。其不但可以提供位置信息,而且對基于麥克風陣列的語音增強技術具有重要的作用。此外,利用聲源定位技術,還可以改善基本的盲源分離技術在聲音混迭的環境的性能,解決語音信號的重構問題,顯著改善恢復的語音信號的質量。聲源定位是多年來國內外研究的重點課題,剛開始是應用在軍事上,但隨著時代的發展,聲源定位技術也逐漸地應用到了日常生活當中,比如機器人眼追蹤[15],視頻會議系統通過定位發言者的位置,自動將攝像頭對準發言者等。基于麥克風陣列的聲源定位技術已經成為一大研究熱點,對其開展研究具有很強的理論意義和實踐價值[16]。現有的大部分定位系統使用的算法的計算量較大,實時性較差,不能滿足實時性要求高的場合。所以提高聲源定位的實時性,對于提高基于麥克風陣列的語音信號處理的響應速度具有非常重要的意義。本文提出了一種基于廣義互相關時延估計的四元十字陣實時聲源定位算法,并使用Cortex-A8嵌入式平臺實現了這個聲源定位系統。仿真實驗表明,提出的算法的魯棒性優于傳統互相關法的聲源定位算法。
1 聲源定位系統硬件框圖
聲源定位系統的主要功能就是對采集到的聲音信號進行處理,給出定位結果。在設計實際的系統時,我們既要有效地采集聲源信號,又要準確地實現聲源的定位。在選擇處理器時,即要考慮處理器的成本,又要考慮其運算能力以及未來方便升級算法等因素。本文經過綜合比較分析后,決定選擇使用三星的S5PV210作為處理器[17],選擇使用WM8960來實現音頻編碼。系統的硬件框圖如圖1所示。

圖1 聲源定位系統的硬件框圖
圖1中的嵌入式最小硬件系統,由S5PV210處理器、SDRAM、NAND Flash、電源模塊、時鐘模塊和復位電路組成。其主要功能是穩定可靠地運行操作系統。
系統采用4個麥克風組成四元十字陣來估計聲源位置,具體的算法將在下一小節中推導。麥克風采集到模擬聲信號后,送到WM8960音頻編解碼芯片進行編碼。編碼后的數字信號送往S5PV210處理,用定位算法計算出聲源位置。再利用超級終端通過串口與嵌入式系統進行交互,最終結果打印在超級終端上。其中SD卡和USB模塊用于嵌入式系統程序的燒寫和未來系統的升級。
2 基于四元十字陣聲源定位算法原理
本文采用四元十字陣聲源定位算法。建立四元十字陣列分別由麥克風M1、M2、M3和M4組成,陣元間距為L,以陣列中心位置為原點O,建立如圖2所示的直角坐標系。
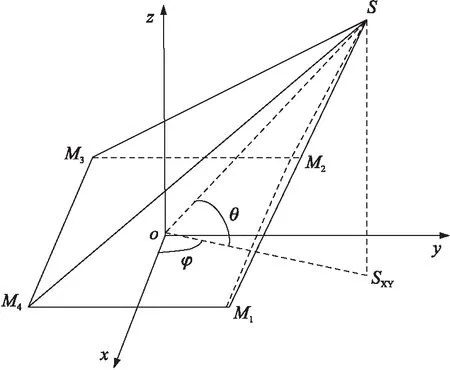
圖2 四元十字陣結構圖
4個陣元的直角坐標分別為M1(L/2,L/2,0),M2(-L/2,L/2,0),M3(-L/2,-L/2,0),M4(L/2,-L/2,0)。假設聲源所在位置坐標為S(x,y,z),聲源距離坐標原點的距離為r,仰角為θ,方位角為φ。R1為聲源S到陣元M1的距離,d12、d13、d14為陣元之間的聲程差,則根據目標和聲陣的幾何位置關系有:
(1)
將方程組整理并化簡可得:

(2)
將式(2)代入方程組并整理可得:
(3)
式中:d12=τ12C,d13=τ13C,d14=τ14C。τ12、τ13、τ14為參考陣元M1與其他陣元間的時間差,C為聲速。通過方程組(3),只要估算出時時間差便可求得x、y、z和R1,同時可以得到方位角:
φ=arctan(y/x)
(4)
仰角:

(5)
在實際應用中,該陣型的幾何算法還可簡化為:
φ=arctan(dy/dx)
(6)

(7)
式中:
(8)
上面兩式是平面四元方陣的最佳算法。
四元十字陣定位中聲源的方向角和仰角的均方誤差表達式是:
(9)
式中:δd表示聲程差dij估計的均方誤差。
3 廣義互相關時延估計算法
四元十字陣可以使估計方位角時精度提高,但是,該陣在估計距離時會產生一定估計誤差,因此,時延估計算法的選取很重要,時延估計算法是利用時延估計來完成目標的聯合測向和測距,其中時延就是聲源到達各麥克風的時間差。聲源的位置是由傳聲器陣列中各組時延值和傳聲器陣列的幾何關系得到的。本文中我們選取廣義互相關時延估計法來進行時延估計。廣義互相關法以基本互相關為理論基礎,通過求兩信號之間的互功率譜,并在功率譜域內給予一定的加權,再反變換到時域得到兩信號之間的互相關函數,最終估計出兩信號之間的時延。
3.1 傳統互相關法
設麥克風1、2接收信號的離散時間信號模型為:
x1(n)=α1s(n-τ1)+n1(n)
(10)
x2(n)=α2s(n-τ2)+n2(n)
(11)
式中:s(n)為聲源信號,n1(n)、n2(n)是高斯白噪聲。s(n)、n1(n)和n2(n)兩兩互不相關,τ1、τ2分別是是聲波從聲源到麥克風1、麥克風2的傳播時間,τ=τ1-τ2是兩麥克風間的時延。x1(n)、x2(n)的互相關函數R12(τ)可表示為:
R12(τ)=E[x1(n)x2(n-τ)]
(12)
將式(10)和式(11)代入式(12),可得:
R12(τ)=α1α2E[s(n-τ1)s(n-τ2-τ)]+
α1E[s(n-τ1)n2(n-τ)]+
α2E[s(n-τ2-τ)n1(n)]+E[n1(n)n2(n-τ)]
(13)
由于s(n)、n1(n)和n2(n)兩兩互不相關,式(13)變為
R12(τ) =α1α2E[s(n-τ1)s(n-τ1-τ)]
=α1α2Rss(τ-(τ1-τ2))
(14)
根據自相關函數的性質:Rss(τ)≤|Rss(0)|,可知當τ-(τ1-τ2)=0時,R12(τ)取其最大值,因此求得R12(τ)取最大值時對應的τ,就是兩個麥克風之間的時延τ12。
3.2 廣義互相關法
傳統互相關時延估計法原理簡單,運算量小。然而在實際環境中,由于噪聲和混響的影響,相關函數的最大峰值會被弱化,有時還會出現多個峰值,這些都造成了實際峰值檢測的困難[18]。廣義互相關法以基本互相關為理論基礎,通過求兩信號之間的互功率譜,并在功率譜域內給予一定的加權,再反變換到時域得到兩信號之間的互相關函數,最終估計出兩信號之間的時延,其原理圖如圖3所示,其中()*表示共軛運算。

圖3 廣義互相關法原理框圖
根據以上分析,我們先把兩路信號的自相關函數做傅里葉變換,得第1個和第2個麥克風接收信號的互功率譜:
Φx1x2(ω)=α1α2Φss(ω)e-jωτ12
(15)
式中:Φx1x2(ω)、Φss(ω)分別為R12(τ)、Rss(τ)對應的功率譜。對式(15)加權后做反傅里葉變換,可得到廣義互相關函數:

(16)
式中:Ψ12(ω)為廣義加權函數,實際應用時,可針對不同的噪聲和混響情況可以選擇不同的Ψ12(ω)。
Φx1x2(ω)表示x1(n)、x2(n)的互功率譜。|γ12(ω)|2的定義為:

(17)
廣義互相關法建立在非混響模型基礎上的,由于受此種模型影響,廣義互相關法不適用于有多個聲源以及方向性的干擾噪聲的情況。該方法在單聲源、非相關噪聲和低混響的環境中效果很好。另外它還具有運算量小、算法復雜度低、易于實現等優點。

圖4 聲源信號波形及端點檢測結果
4 仿真實驗結果
仿真中選取一段語音段長為1.12 s、采樣頻率為44 100 Hz的信號作為聲源。首先對信號進行預處理,再將經過端點檢測的信號,即含語音信號,用來做時延估計,這樣降低了計算量。聲源信號的波形如圖4所示,其中紅色豎線為語音端點檢測的結果。
在仿真實驗中,房間的尺寸為6 m×6 m×3 m,聲源坐標為[4 m,4 m,1 m],兩個麥克風的坐標分別為[1 m,1 m,1 m]、[4 m,1 m,1 m]。用Image法產生房間脈沖響應,考慮無混響的情況下,設置房間墻壁反射系數為0,圖5為聲源到兩麥克風的傳遞函數。再將聲源信號與傳遞函數卷積,就分別得到了兩個麥克風的接收信號。由圖5可以看出,兩麥克風間的時延差為59個點。

圖5 無混響時聲源到兩個麥克風的傳遞函數

圖6 無混響情況下兩種互相關算法在不同信噪比時的對比
實驗分別在信噪比為10 dB、0 dB、-5 dB情況下分別對傳統相關算法和廣義互相關算法進行了對比。該實驗中幀長為2 048,使用的聲源波形如圖6所示。
從圖6可以看出,在無混響、高信噪比的情況下,廣義互相關算法都有較高的穩定性。隨著信噪比的降低,兩種互相關算法的波動都有所增加,廣義互相關算法相對傳統互相關算法較為穩定。
5 結論
本文提出了一種基于廣義互相關時延估計的四元十字陣的實時聲源定位算法,在此基礎上設計了一套實時聲源定位系統。在綜合考慮功耗限制,算法復雜度,數據處理能力,多路音頻輸入及接口限制等等因素后,選擇了以Cortex-A8嵌入式平臺的聲源定位系統,并對系統硬件的設計等做了闡述。仿真實驗表明,提出的算法的魯棒性優于傳統互相關法的聲源定位算法。
[1] 杜江,朱柯. 智能麥克風陣列語音分離和說話人跟蹤技術研究[J]. 電子學報,2005,33(2):382-384.
[2] 柯昆. 聲源定位技術研究[D]. 西安:西安電子科技大學,2010.
[3] 劉真旭. 基于麥克風陣列的實時聲源定位[J]. 計算機應用與軟件,2010,27(6):43-45.
[4] Flanagan J L.Bandwidth Design for Speech-Seeking Microphone Arrays[C]//Proceedings of ICASSP85,Tampa,FL,1985:732-735.
[5] Kellerman W.A Self-Steering Digital Microphone Array[C]//Proceedings of ICASSP91,Toronto,CA,1991:3581-3584.
[6] Che C,Q Lin.Microphone Arrays and Neural Networks for Robust Speech Recognition[C]//Proceedings of the Human Language Technology Workshop,Plainsboro,NJ,1994:342-347.
[7] Giuliani D,M Omologo. Talker Localization and Speech Recognition Using a Microphone Array and a Cross-Power Spectrum Phase Analysis[C]//Proceedings of ICSLP,1994,Volume 3:1243-1246.
[8] Michel O,Clergeot H. Multiple Source Tracking Using a High Resolution Method[J]. Acoustics,Speech,and Signal Processing,1991,Volume 2:1277-1280.
[9] Grenier Y.A Microphone Array for Car Environments[C]//Proceedings of ICASSP92,San Francisco,CA,1992,VolumeⅠ:305-309.
[10] Oh S,V Viswanathan. Hands-Free Voice Communication in an Automobile with a Microphone Array[C]//Proceedings of ICASSP92,San Francisco,CA,1992:Volume I:281-284.
[11] Flanagan J,Surendran A. Spatially Selective Sound Capture for Speech and Audio Processing[J]. Speech Communication,1993,13(1-2):207-222.
[12] Jan E,Svaizer P. Matched-Filter Processing of Microphone Array for Spatial Volume Selectivity[C]//Proceedings of ISCAS95,Piscataway,NJ,USA,1995:1460-1463.
[13] Flanagan,Johnson J D. Computer-Steered Microphone Arrays for Sound Transduction in Large Rooms[J]. Acoust Soc Amer,1985,78(5),1508-1518.
[14] Greenberg J E,Zurek P M. Evaluation of an Adaptive Beamforming Method for Hearing Aids[J]. Acoust Soc Amer,1992,91:1992-1676.
[15] Michel O,Clergeot H. Multiple Source Tracking using a High Resolution Method[J]. Acoustics,Speech,and Signal Processing,1991,2:1277-1280.
[16] 崔瑋瑋,曹志剛,魏建強. 基于雙麥克風的2維平面定位算法[J]. 信號處理,2008,24(2):299-302.
[17] Samsung. S5PV210 RISC Microprocessor User’s Manual Revision 1.10. 2010:1-15.
[18] 李雪梅,陶然,王越,等. 時延估計技術研究[J]. 雷達科學與技術,2010,8(4):362-367.
AcousticSourceLocalizationAlgorithmBasedonFour-ElementsCrossMicrophoneArray*
WANG,Yong1*,WANG,Qinyun2
(1.School of Information and Electrical Engineering,College of Industrial Technology,Xuzhou Jiangsu 221140 China;2.School of Communication Engineering,Institute of Nanjing Technology,Nanjing 211167,China)
A sound source location system based on four-elements cross microphone array is realized. Four-elements cross array is selected as the microphone array and the formulas of sound source localization algorithm based on four-elements cross microphone array are also derived. To solve the question that the robustness of cross-correlation time delay estimation method is poor in low signal-to-noise ratio and reverberation environment,the system uses generalized cross correlation algorithm to estimate the location of the delay,and the cortex-A8 embedded platform to achieve a robust sound source localization system.
microphone array;sound source localization;embedded system
10.3969/j.issn.1005-9490.2017.05.033
項目來源:國家自然科學基金項目(61375028)
2016-08-02修改日期2016-09-26
TN912.34
A
1005-9490(2017)05-1224-05
王永(1972-),男,江蘇銅山人,碩士,副教授,徐州工業職業技術學院,主要研究方向為計算機應用與電子通信技術,wy_040618@163.com。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
