單AGV“貨到人”揀選模式仿真系統的設計與實現
2017-11-07 08:27:02
福建質量管理 2017年20期
(北京物資學院 北京 101149)
單AGV“貨到人”揀選模式仿真系統的設計與實現
從燦蘇永強
(北京物資學院北京101149)
“貨到人”揀選模式是當前倉儲應用的研究熱點,本文設計并實現了該模式下的單AGV仿真系統,以便進行更深入的研究,同時,也為研究相關問題的讀者提供參考。
“貨到人”揀選模式;AGV;仿真系統
“貨到人”揀選模式仿真系統由布局編輯器與揀選模擬器兩部分組成。其中布局編輯器由用戶根據其具體的實際情況或研究問題對揀選系統的布局進行設置,在合理設置之后,便可運行揀選模擬器進行AGV模擬作業。模擬器會隨機選擇一個貨架、一個人工揀選臺作為目標貨架、目標揀選臺,并將該貨架位置信息發送給閑置狀態的AGV,AGV便可根據自身位置與目標位置進行A*算法路勁規劃,并得到最短可行路徑,進而取貨。AGV抵達目標貨架位置并取貨后,便可再次根據自身位置與目標揀選臺位置進行A*算法路勁規劃,從而抵達目標揀選臺,并進行人工揀選。揀選完成后,AGV再抬著貨架返回目標貨架初始位置,并卸下貨架。至此,單次模擬揀選作業結束。
一、布局編輯器的設計與實現
布局編輯器由一個對話框與一個編輯界面組成,如圖1、圖2所示。其中對話框用于輸入布局長寬,編輯界面用于在已生成長寬的布局里進一步設置貨架位置、揀選臺位置、障礙物位置。
當長寬設置超過編輯界面主窗口默認大小時,在主窗口右側、下側會自動顯示滾動條。用戶可通過挪動滾動條瀏覽或編輯整個布局。編輯主窗口右側是可拖拽工具欄菜單(ToolBar),用戶可根據自身需要拖拽其至編輯界面以外。工具欄菜單上展示的是倉儲布局里的基本單元,可個性化定制,在這里,僅使用三種必備基本單元,由上到下,分別是貨架,障礙物,揀選臺。
如圖3所示,工具欄菜單可進行如下操作:
(一)選中基本單元:由鼠標左鍵單擊工具欄上目標圖標實現。成功選中后,鼠標的圖標變為所選圖標。
(二)添加基本單元:選中目標后,在所需位置上單擊鼠標左鍵進行添加。添加成功后,單擊位置顯示已添加基本單元。
(三)撤銷選中狀態:選中目標后,單擊鼠標右鍵實現撤銷選中狀態。
(四)刪除已添加基本單元:撤銷選中狀態返回默認鼠標后,在所需位置上單擊鼠標右鍵刪除已添加基本單元。
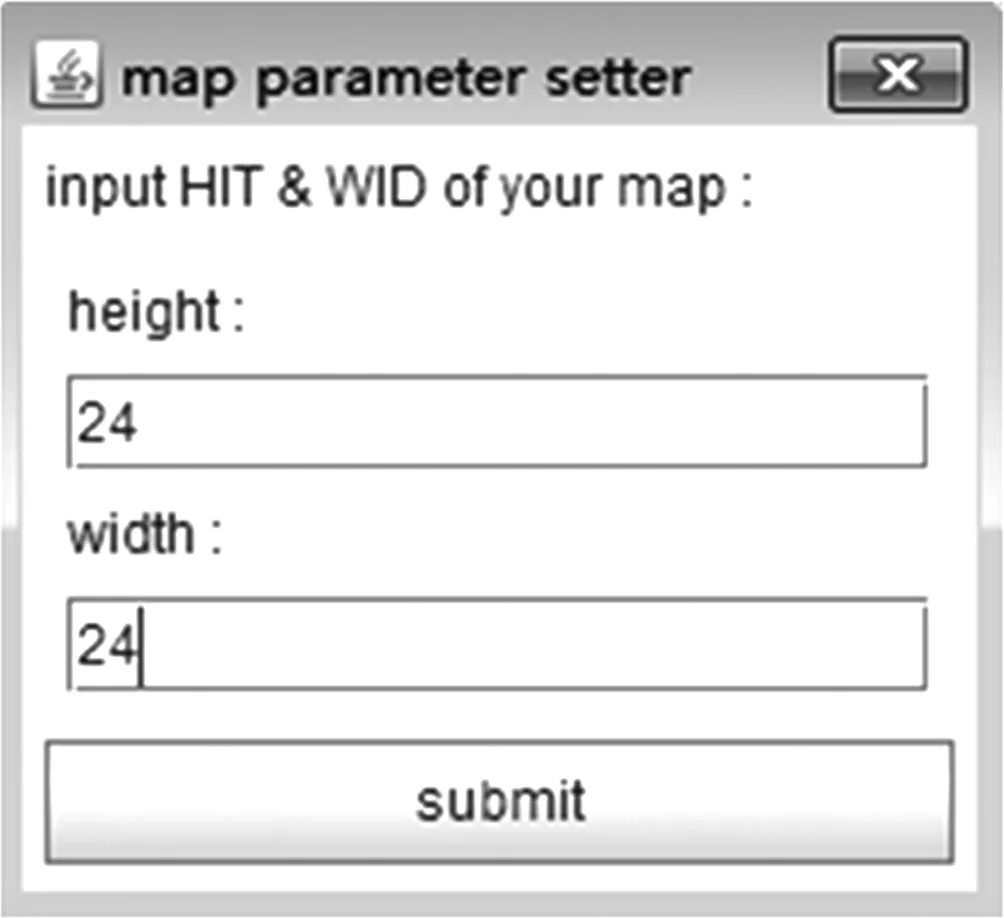
圖1 對話框
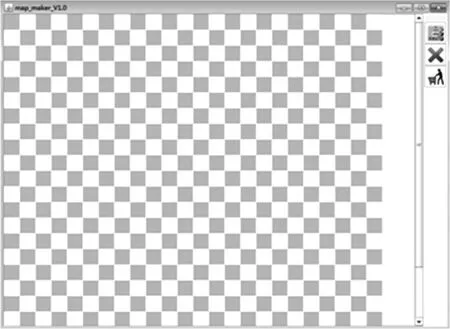
圖2 編輯主界面
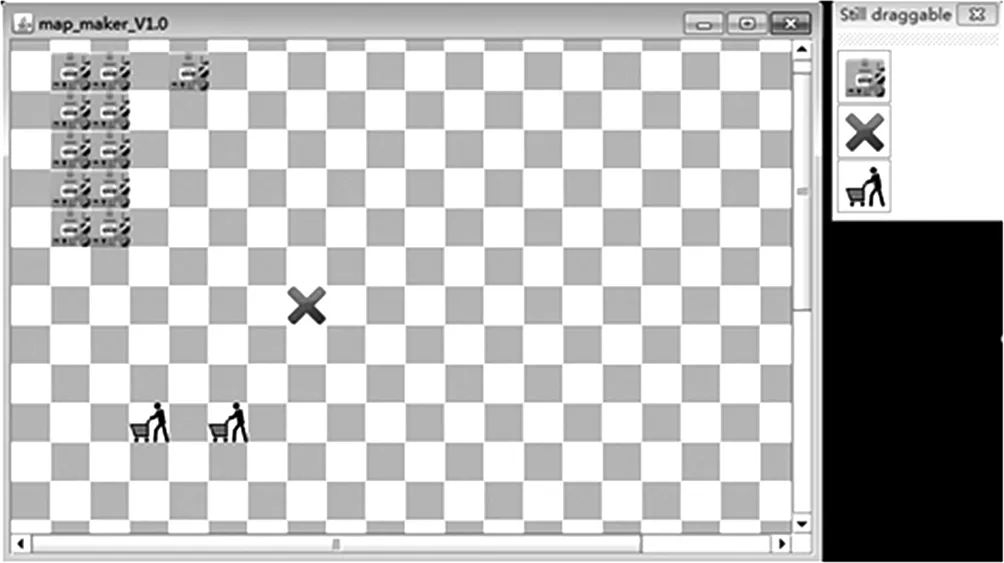
圖3 使用示意圖
二、揀選模擬器的設計與實現
布局編輯器通過鼠標、鍵盤等輸入設備進行編輯,并同時更新顯示。當編輯完成后,布局信息將以一個二維數組的形式保存于內存中。揀選模擬器在得到該矩陣后,再進行揀選模擬。首先,揀選模擬器會根據隨機數發生器,生成兩個隨機數,該隨機數分別代表一個已有貨架、一個已有揀選臺。此時,模擬器再根據后臺設置的AGV位置,進行A*算法路徑規劃。計算所得為AGV位置至貨架位置的最短路徑、貨架位置至揀選臺位置的最短路徑、揀選臺位置返回貨架位置的最短路徑,并將路徑信息封裝為鏈表返回給程序顯示端。程序顯示端將在AGV移動線程里重畫AGV圖標。
為避免圖標重畫造成的閃爍問題,AGV圖標應當以小像素為移動單位,并在每次移動后,進行適當的線程休眠,以達到更好的視覺效果。
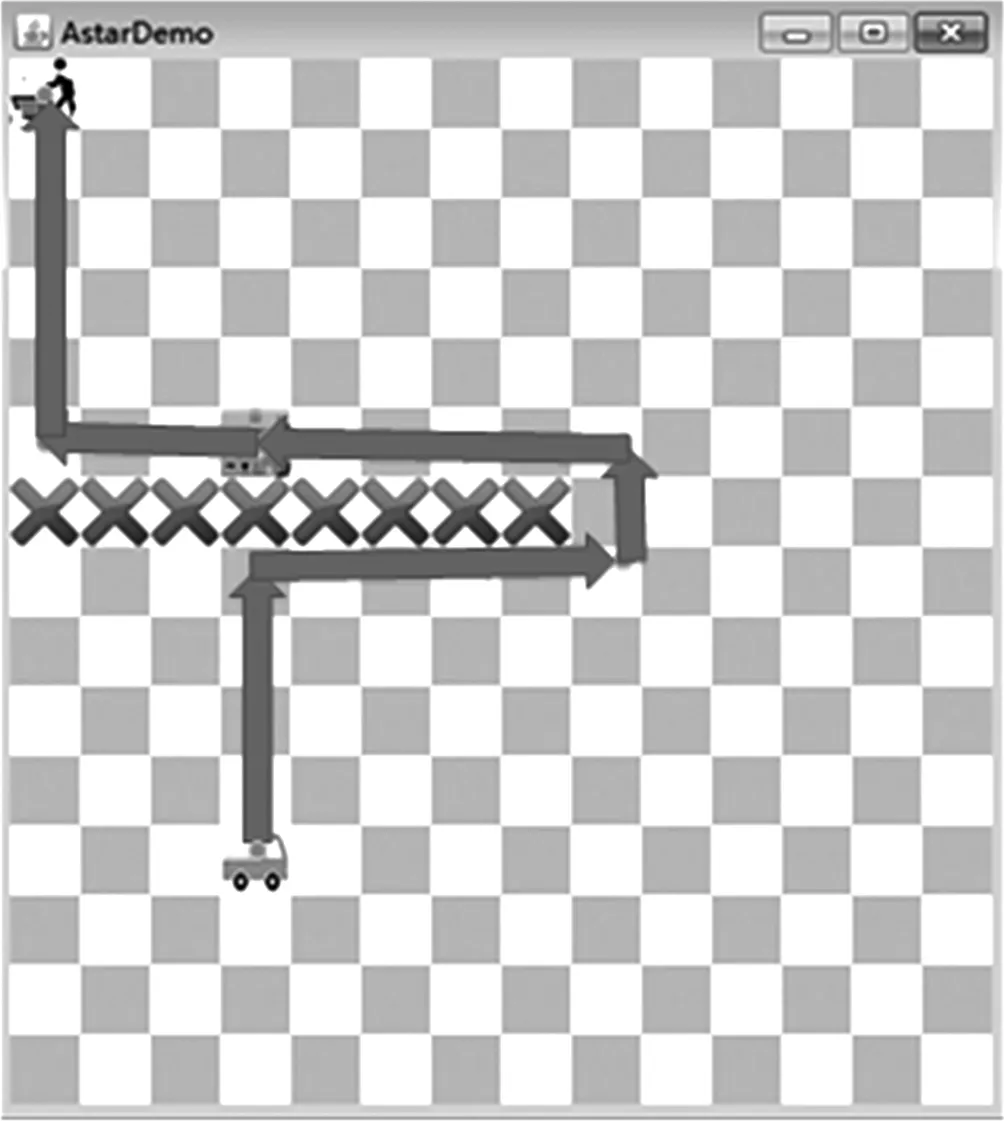
一個簡單的測試用例如圖4、圖5所示,在一個14x14的布局上,以左上角為原點,AGV默認位置為(3,11),在得到目標貨架位置(3,5),目標揀選臺位置(0,0)后,即可根據A星算法得到無障礙路徑,從而進行模擬揀選作業。
[1]Komma V R,Jain P K,Mehta N K.Agent-based simulation of a shop floor controller using hybrid communication Protocols[J].International Journal of Simulation Modelling,2007,6(4):206-217.
[2]Stefan Walter.OpenTCS 3.2 User manual[M].Fraunhofer IML,2016.
從燦(1992-),男,漢族,安徽馬鞍山市人,碩士研究生在讀,工程碩士,北京物資學院,研究方向智能物流系統;蘇永強(1992-),男,漢族,河北石家莊市人,碩士研究生在讀,管理學碩士,北京物資學院,研究方向模型與算法優化。
