艦載雷達偵察系統坐標系轉換方法
2017-11-20 01:17:42閆秋飛
艦船電子對抗 2017年5期
閆秋飛,王 聰
(中國船舶重工集團公司第七二三研究所,江蘇 揚州225001)
艦載雷達偵察系統坐標系轉換方法
閆秋飛,王 聰
(中國船舶重工集團公司第七二三研究所,江蘇 揚州225001)
介紹了艦載雷達偵察系統常用坐標系轉換方法,包括艦船地理坐標系到艦船甲板坐標系的變換及逆變換、艦船甲板坐標系到陣面坐標系的變換及逆變換,給出了具體的推導過程及坐標系相互轉換的公式,結合坐標系轉換的理論方法,闡述了艦載雷達偵察系統坐標系轉換的應用實例。
坐標變換;艦船地理坐標系;艦船甲板坐標系;陣面坐標系;縱搖角;橫搖角
0 引 言
艦船在水面航行時,航向、縱搖、橫搖會發生改變,為保證雷達偵察系統測向的穩定,使目標指向在慣性空間內穩定,一般采用坐標變換技術對艦船的搖擺姿態角進行角度的實時補償。在艦載雷達偵察系統中,利用平臺羅經測得的艦船航向角、縱搖角、橫搖角實時送給雷達偵察系統,雷達偵察系統根據在船上的安裝位置實時進行角度補償,得到目標的穩定坐標系[1]。
1 坐標系模型
1.1 地球模型
在仿真中,涉及到大量的空間位置關系及目標姿態等的計算,這些都是在一定的參考坐標系中進行的,而這些都是以地球為慣性參考系的,地球模型是保持空間一致性的基礎。選擇合適的坐標系,對于保證空間的一致性、簡化計算是非常重要的。
地球可以近似看作是一個橢球,公式為:

(1)
式中:X,Y,Z為地球表面上的一點;a為地球長半軸長度,約為6 378 137 m;b為地球短半軸長度,約為6 356 752 m,于是有:

(2)
(3)

(4)
(5)
η=e′cosB
(6)

(7)
(8)

(9)

(10)
式中:RN為P點的卯酉圈曲率半徑,單位為m;e為地球第一偏心率常數;e′為地球第二偏心率常數;f為橢球的扁率[2]。
1.2 大地坐標系
空間一點P的大地坐標用大地緯度B、大地經度L和大地高度H表示。其中,P點的大地子午面和起始大地子午面所構成的二面角L是P點的大地經度,從起始大地子午面算起,向東為正,向西為負;P點的法線和赤道面的夾角B是P點的大地緯度,從赤道面算起,向北為正,向南為負;P點沿法線到地球球面的距離H是大地高,從地球球面起,向外為正,向內為負,圖1為地球參考模型[3]。
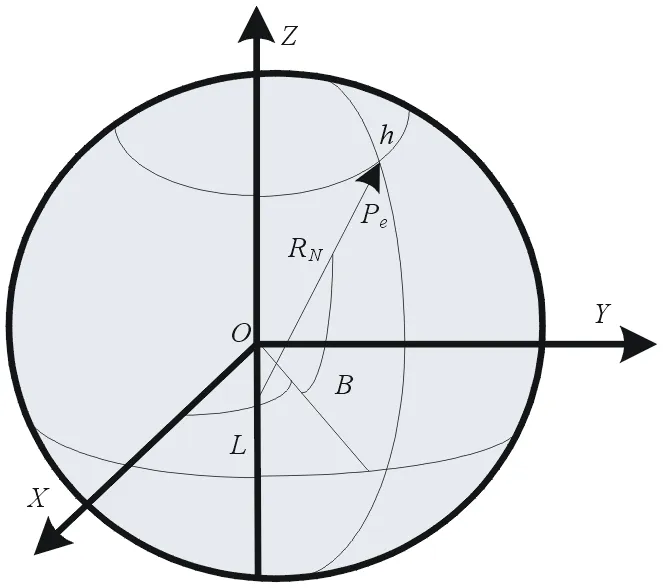
圖1 地球參考模型
1.3 艦船地理坐標系
如圖2所示,艦船地理坐標系OXYZ原點O位于船體搖擺中心;OX軸平行于水平面指向正東;OY軸指向水平面指向正北;OZ軸垂直于OXY平面,向上為正[4]。

圖2 艦船球面坐標及搖擺角模型
1.4 艦船甲板坐標系
如圖2所示,艦船甲板坐標系OXbYbZb原點O位于船體搖擺中心;OYb平行于艏艉線指向艦艏;OXb軸與OYb垂直且平行于甲板平面,指向右舷;OZb垂直于OXbYb平面,向上為正。
1.5 陣面坐標
如圖3所示,陣面坐標系OXcYcZc原點O位于陣面中心;OYc為陣面法線;OXc在陣面平面內垂直于OYc,向右為正;OZc垂直于面OXcYc,向上為正。

圖3 陣面坐標模型
1.6 航向及姿態角定義
如圖2所示,航向角H為從正北開始順時針到艦艏方向的夾角,在水平面內測量,順時針為正,ON與OD的夾角為航向角。縱搖、橫搖定義如圖2所示,BCDEFNG為水平面,MHJKL為甲板平面,縱軸JL為艦船艏艉線,O為艦船搖擺中心,A為天頂。橫軸OH指向右舷為Xb軸,縱軸OJ指向艦艏為Yb軸,OS垂直于OXbYb面為Zb軸,OH、OJ、OS構成OXbYbZb艦船甲板坐標系。艦船的大地直角坐標位于水平面內,OE指向正東X軸,ON指向正北為Y軸,OA指向天頂為Z軸,OE、ON和OA構成OXYZ的艦船地理坐標系。甲板平面的縱搖角P為艦船艏艉線與水平面的夾角,在垂直平面內測量,弧DJ為縱搖角,向上方為正。甲板平面橫搖角R為甲板平面繞艦船艏艉線旋轉的角度,即艦船橫剖面水平面的交線與艦船橫軸之間的夾角,弧HC為橫搖角,右舷下為正[5]。
2 坐標系之間的轉換
2.1 艦船地理坐標系與艦船甲板坐標系之間的轉換
艦船地理坐標系到甲板坐標系的變換需按航向變換、縱搖變換及橫搖變換的順序進行。
如圖4所示,航向變換OXYZ坐標系繞OZ軸旋轉H后的坐標系為OXHYHZ,B點在OXYZ坐標系中的坐標為(x,y,z),在OXHYHZ坐標系中的坐標為(xH,yH,z),B點在水平面內的投影為B′,r=OB′,r與Y軸夾角為方位A,OB與OB′的夾角為俯仰E,由圖4可知:

(11)
xH=rsin(A-H)=
rsinAcosH-rcosAsinH=
xcosH-ysinH
(12)
yH=rcos(A-H)=
rcosAcosH+rsinAsinH=
xsinH+ycosH
(13)
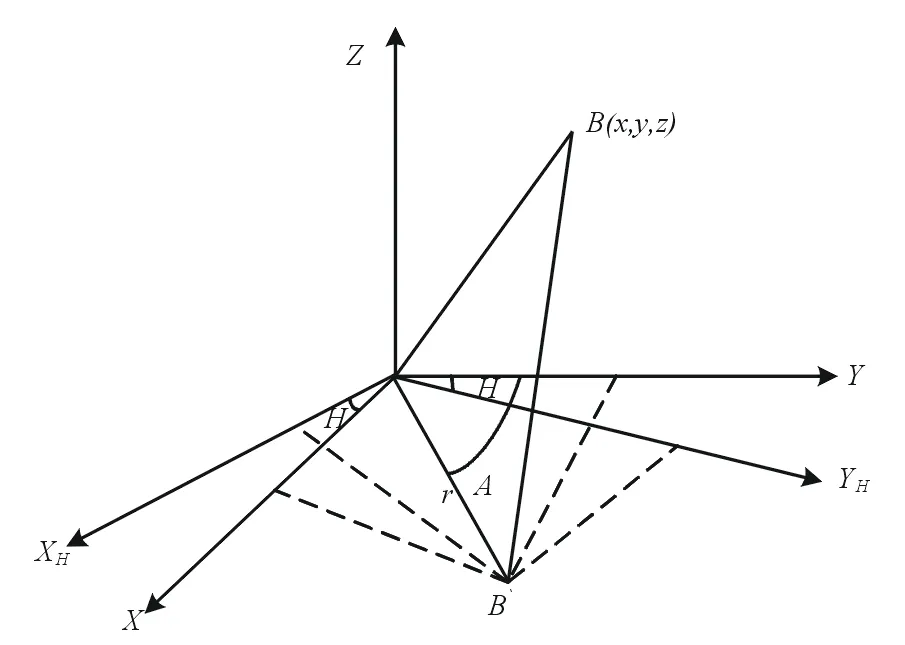
圖4 按航向變換模型圖
則航向角變換矩陣為:
(14)
其逆矩陣為:
(15)
如圖5所示,縱搖變換OXYZ坐標系繞OX軸旋轉P后的坐標系為OXYPZP,B點在OXYZ坐標系中的坐標為(x,y,z),在OXYPZP坐標系中的坐標為(x,yP,zP),B點在鉛錘面內的投影為B′,r=OB′,r與Y軸夾角為F,由圖5可知:

(16)
yP=rcos(F-P)=
rcosFcosP+rsinFsinP=
ycosP+zsinP
(17)
zP=rsin(F-P)=
rsinFcosP-rcosFsinP=
zcosP-ysinP
(18)

圖5 按縱搖變換模型圖
則縱搖角變換矩陣為:
(19)
逆矩陣為:
(20)
如圖6所示,橫搖變換OXYZ坐標系繞OY軸旋轉R后的坐標系為OXRYZR,B點在OXYZ坐標系中的坐標為(x,y,z),在OXRYZR坐標系中的坐標為(xR,y,zR),B點在XOZ面內的投影為B′,r=OB′,r與Z軸夾角為R,由圖6可知:

圖6 按橫搖變換模型圖
(21)
zR=rcos(D-R)=
rcosDcosR+rsinDsinR=
zcosR+xsinR
(22)
xR=rsin(D-R)=
rsinDsinR-rcosDsinR=
xcosR-zsinR
(23)
則橫搖角變換矩陣為:
(24)
逆矩陣為:
(25)
由以上推導可知艦船大地坐標系到甲板坐標系之間的變換矩陣為:
mb=mR·mP·mH
(26)
坐標變換為:
(27)

(28)

(29)

(30)
(31)
2.2 艦船甲板坐標到陣面坐標的轉變
雷達偵察系統陣面安裝時,由于安裝在甲板的不同位置,相對于艦艏艉線陣面有一定的方位安裝偏角和俯仰安裝傾角,假設陣面相對于艦艏艉線的方位安裝偏角為HH,俯仰安裝偏角為EE,根據圖3,由甲板坐標到陣面坐標的轉換首先沿Z軸旋轉,然后沿X軸旋轉[6]。繞Z軸旋轉的旋轉矩陣為:
(32)
逆矩陣為:
(33)
繞X軸旋轉的旋轉矩陣為:
(34)
逆矩陣為:
(35)
由艦船甲板坐標到陣面坐標的旋轉矩陣為:
mc=mPP·mHH
(36)
坐標變換為:

(37)

(38)
(39)
3 坐標系變換在電子對抗系統中的應用
3.1 姿態信息使用流程
如圖7所示,艦船上的姿態儀把航向、縱搖、橫搖等姿態信息送上級系統,上級系統把姿態信息送雷達偵察系統設備主控,設備主控把姿態信息轉發給后端接收處理,接收處理把姿態信息轉發給不同象限的陣面。其中航向角為艏艉線與真北方向的夾角,順時針為正,取值范圍0~360°;縱搖角規定艏高為正,艏低為負;橫搖角規定左舷高為正,左舷低為負。

圖7 艦船姿態信息使用流程
3.2 陣面坐標到艦船甲板坐標變換
在艦載雷達偵察系統的應用中,首先把陣面坐標系下測得的方位Ac、俯仰Ec轉換為甲板坐標系下的方位和俯仰。
假設目標在陣面直角坐標系下的坐標為:
(40)
轉換為艦船甲板坐標系下的坐標,轉換矩陣:
(41)
坐標轉化為:
(42)

(43)
(44)
(45)

(46)

(47)
式中:Ab和Eb分別為目標在艦船甲板坐標系下的方位和俯仰。
3.3 艦船甲板坐標到艦船大地坐標變換
由艦船甲板坐標系下的坐標轉換為大地直角坐標系下的坐標(x,y,z),轉換矩陣為:
(48)
(49)
坐標變換如下:
(50)

(51)
(52)
(53)
(54)

(55)

(56)
式中:A和E分別為目標在艦船甲板坐標系下的方位和俯仰。
4 結束語
針對艦載雷達偵察系統常用的艦船大地坐標、艦船甲板坐標、陣面坐標,本文給出了相互轉化方法并對公式進行了推導,對艦載雷達偵察系統的坐標變換實際應用進行了說明,對艦載雷達及偵察系統的坐標變換具有一定的指導意義。
[1] 曹正才.艦載雷達常用穩定方式坐標變換[J].雷達與對抗,2010,30(1):48-52.
[2] 胡明城.全球定位系統(GPS)的最新進展[J].測繪科學,2001(1):38-43.
[3] 張勤,要家權.GPS測量原理及應用[M].北京.科學出版社,1996.
[4] 張志遠,羅國富.艦船姿態坐標變換及穩定補償分析[J].艦船科學技術,2009,31(4):34-40.
[5] 王有朝.對艦艇縱橫搖坐標變換的討論[J].現代雷達,2001(4):27-30.
[6] 王航宇,王士杰,李鵬.艦載火控原理[M].北京:國防工業出版社,2006.
CoordinateTransformationMethodsofShipboardRadarReconnaissanceSystem
YAN Qiu-fei,WANG Cong
(The 723 Institute of CSIC,Yangzhou 225001,China)
This paper introduces the common coordinate transformation methods of shipboard radar reconnaissance system,such as the transformation and inverse transformation of ship geographic coordinate to ship deck coordinate,the transformation and inverse transformation of ship deck coordinate to array coordinate,presents the specific derivation process and coordinate transformation formulas,expatiates the application example for coordinate transformation of shipboard radar reconnaissance system combined with the theoretical method of coordinate transformation.
coordinate transformation;ship geographic coordinate;ship deck coordinate;array coordinate;pitching angle;rolling angle
TN957.51
A
CN32-1413(2017)05-0034-06
10.16426/j.cnki.jcdzdk.2017.05.007
2017-06-29
