某型重卡診斷設計中定時參數的選擇及應用
2017-11-21 08:41:40彭宏偉孫鵬杜文龍
汽車實用技術 2017年21期
關鍵詞:故障
彭宏偉,孫鵬,杜文龍
(安徽江淮汽車集團股份有限公司,安徽 合肥 230601)
某型重卡診斷設計中定時參數的選擇及應用
彭宏偉,孫鵬,杜文龍
(安徽江淮汽車集團股份有限公司,安徽 合肥 230601)
文章以某型重卡的診斷定時參數設置為例,淺述了 UDSonCAN協議中關于診斷定時參數的相關要求及具體應用流程,將診斷協議中定時參數的使用場景具象化,選擇合適的定時參數數值,通過控制器診斷測試流程進行校驗分析,既可以滿足控制器診斷測試的可靠性要求,也提高了診斷流程的效率,為相關車型的診斷測試提供一定的參考。
診斷設計;定時參數;診斷測試
前言
隨著重型商用車行業的深入發展,客戶對整車安全性、舒適性方面的要求越來越高。同時,伴隨著車輛智能化步伐的加快,商用車上搭載的電氣控制模塊也在不斷的增加,整車 CAN網絡系統日趨復雜,整車網絡上出現故障的概率也隨之增加。因此,在車輛全生命周期過程中對整車網絡上各個控制器模塊進行診斷測試的需求也越發迫切。診斷是利用診斷測試工具和控制器進行通信,由診斷測試工具向控制器發送相關命令,然后控制器按照實際狀況對測試設備進行應答。整個診斷測試過程中二者之間的通信遵循著既定的時序,按照診斷協議的定時參數進行報文收發。本文將從某型重卡的診斷系統開發方面來簡單介紹基于 UDSonCAN診斷協議的重卡診斷定時參數設置和具體應用。
1 診斷需求概要
完整的 ECU診斷功能由內部自診斷功能及必要的診斷協議組成。前者指在初始化及運行階段ECU執行的故障檢測等功能。后者根據不同應用場合又可分為離線診斷協議和在線診斷協議。診斷協議的功能包括故障信息及標識信息獲取、輸入輸出及例程控制、重編程等。
診斷測試工具和控制器之間通過協議既定的定時參數進行通信交互,即診斷測試工具按照協議規定的時間參數向控制器發送請求信息,控制器按照協議規定的時間參數向測試工具發送響應信息。因此定時參數的設置不僅直接關系到診斷測試能否按照規定的要求執行下去,也決定了診斷測試的測試周期和測試效率。
1.1 自診斷需求
所有ECU都應持續地進行故障自診斷,以監控運行狀態下的異常事件(錯誤)。故障自診斷包括兩種:初始化階段自診斷及持續運行時的自診斷。
故障自診斷的范圍,應包含但不限于如下所列內容:
1)ECU內部異常情況;
2)網絡通信異常情況;
3)輸入/輸出線路的開路或短路情況;
4)超出線路正常運行范圍的錯誤信號;
5)迫使系統以失效安全模式運行的情況。
1.2 診斷標識符
診斷協議標識符用于支持在靜態環境下通過診斷工具對整車進行診斷操作,如讀取既有故障信息、進行數據讀寫操作等。
本文描述的控制器(ECU)只支持常規固定尋址方式,常規固定尋址格式如表1所示。
同時,ECU都必須支持兩種診斷標識符:物理尋址標識符和功能尋址標識符。表 2描述了符合 OBD法規的 29位CAN標識符,這29位CAN標識符兼容常規固定尋址格式而且可以應用于增強型診斷。

表1 常規固定尋址格式
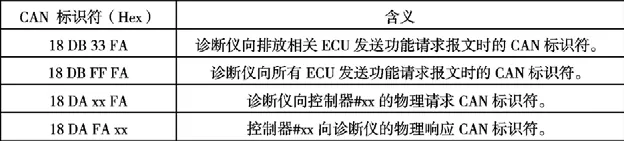
表2 診斷CAN標識符
所有 CAN網絡上的控制器都使用統一的功能尋址標識符,即CAN標識符0x18DBFFFA。ECU使用的物理尋址請求及響應的CAN標識符由ECU控制器按照表2描述的格式,結合自身節點地址進行控制器#xx的具體定義。
1.3 定時參數要求
1.3.1 網絡層定時

表3 診斷報文格式
診斷測試工具與控制器在網絡層的交互是通過報文形式進行的,診斷報文從格式上分為單幀報文和多幀報文,具體格式定義如表3所示。
對于多幀報文來說,顧名思義即診斷測試工具與控制器之間需要通過傳輸多條報文來交互信息,因此多幀報文按照什么樣的定時參數來發送是網絡層需要定義的重要內容之一。多幀報文發送方與接收方間的網絡層定時參數如圖1所示。
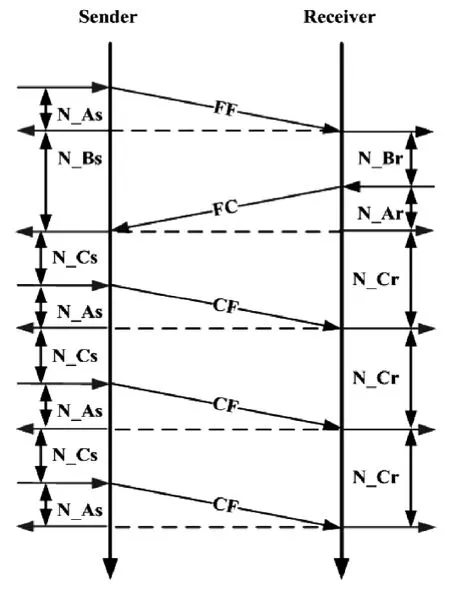
圖1
網絡層流控制狀態時間參數要求如表4所示,應用模式表示 ECU運行的是應用程序。引導程序模式表示ECU正在運行引導程序,通常處在編程會話模式。

表4 網絡層流控制狀態參數
網絡層診斷多幀報文收發的定時參數要求如表5所示。為了降低軟件復雜度,推薦OBD相關的ECU只實現一組網絡層定時參數,即上表所定義的“排放相關要求(OBD)”列中的參數。對于非OBD相關ECU,或者可以支持兩組網絡層定時參數的OBD相關ECU,需要支持上表中定義的“增強型診斷”列中的參數。
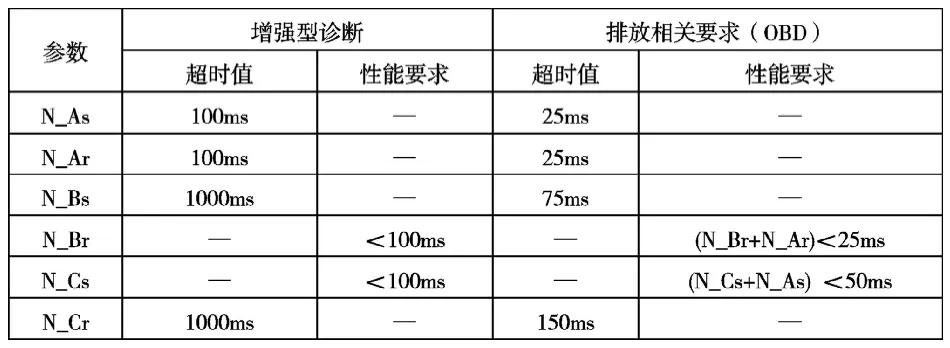
表5 網絡多幀報文收發定時參數
1.3.2 診斷層定時
在診斷應用層上,診斷測試工具與控制器之間的請求-響應的時序關系如圖2所示。當接收到ECU發送的包含78h否定響應碼的報文后(請求正確接收–但響應未決),診斷工具需更改響應定時要求,即使用增強定時器 P2*進行定時參數設定。

圖2 診斷工具和ECU間的診斷層定時
診斷應用層的定時參數的定義如表6和表7所示。

表6 ECU診斷層參數要求

表7 ECU會話層參數要求
2 應用與驗證
按照上述診斷定時參數的選值進行整車控制器的軟件開發,同時也按照同樣的定時參數取值對診斷測試工具進行設置,通過實際診斷測試來驗證診斷定時參數選取的合理性及可靠性。為了能夠較為全面的驗證所選擇的定時參數,本文選擇對某型重卡上面行車記錄儀控制器來進行診斷協議測試及診斷BT測試,通過完整的診斷測試流程及準確的結果記錄分析達到我們的既定目標。
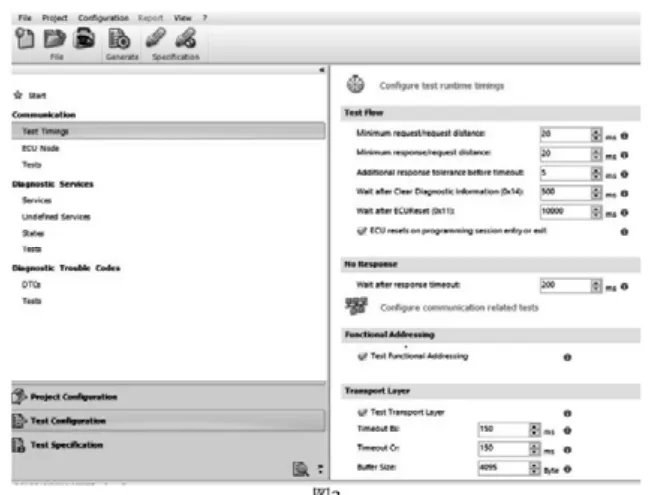
圖3
診斷協議測試是通過制作控制器的診斷協議文件(.pdx),導入CANdiva軟件之后生成診斷工程文件(.diva),通過設置diva工程的定時參數,可以實現對控制器的自動診斷測試。本文通過CANdiva新建了行車記錄儀TCO控制器的診斷diva工程,定時參數設置如下圖3所示。
通過CANoe加載上述的.diva工程之后,可以進行診斷協議測試,運行測試之后結果如圖4所示。

圖4
診斷BT測試通過CPAL編程實現定時參數設置,利用CANoe軟件將控制器的BT軟件(.hex或.s19)通過特定的流程刷寫到控制器中,本文也利用行車記錄儀TCO控制器進行了BT測試,測試記錄如圖5所示。

圖5
通過合理設置的診斷定時參數,可以滿足診斷測試工具和待測控制器之間的診斷通信,避免出現因定時參數不一致造成的診斷測試異常或失敗。尤其是在進行控制器BT診斷測試過程中,合適的診斷定時參數就顯得更加重要,通過優化之后的定時參數既可以滿足BT測試的順利進行,也可以縮短測試時長,提高測試效率。
3 結束語
商用車 CAN網絡的應用逐漸趨向高端化和智能化,網絡系統的診斷設計成為確保車輛可靠性的重要一環。而定時參數做為診斷通信的時間基準,合理的取值既可以滿足診斷測試順利執行,也可以一定程度上提高診斷的效率。本文簡述了基于 UDSonCAN診斷協議進行診斷設計時需要確定的定時參數,以某型重卡車載控制器為例選取了具體的定時參數數值,通過診斷測試驗證取值的合理性,為相關整車網絡診斷設計提供一定的參考。
[1] ISO 14229-1:Road vehicles-Unified diagnostic services (UDS) -Part 1:Specification and requirements[Z].International Standards Organi-zation. 2006.
[2] ISO 15765-2:Road vehicles-Diagnostics on Controller Area Network(CAN)-Part 2:Network layer services.International Standards Organ-ization. 2004.
Timing Parameter Choosing and Application in Diagnostic Design of A Heavy Truck
Peng Hongwei, Sun Peng, Du Wenlong
( Anhui Jianghuai Automobile group Co., Ltd, Anhui Hefei 230601 )
In this paper, a heavy truck is taken as an example to describe the vehicle diagnostic timing parameters setting, and introduces the requirements on the diagnosis of timing parameters in the UDSonCAN protocol and the specific application process.Visualize of the use of the timing parameters in the diagnostic protocol. By choosing the appropriate timing parameters, the controller diagnostic test flow is used for verification and analysis. It can not only meet the reliability requirements of the controller diagnostic test, but also improve the efficiency of the diagnosis process, and provide a reference for the diagnosis and testing of the related vehicle type.
Diagnostic Design; Timing parameters; Diagnostic test
U467.1
A
1671-7988 (2017)21-43-03
10.16638/j.cnki.1671-7988.2017.21.016
CLC NO.: U467.1
A
1671-7988 (2017)21-43-03
彭宏偉,男,工程師,就職于安徽江淮汽車技術中心,從事電器設計工作,研究方向為車載網絡技術。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
