基于SLAM算法的無人機雷達避障系統
2017-11-29 02:27:32廖建新周生威山東科技大學山東泰安271000
數碼設計 2017年15期
關鍵詞:系統
廖建新 徐 康 周生威(山東科技大學 山東 泰安 271000)
1 無人機避障系統簡介
隨著國內外無人機相關技術飛速發展,無人機開始被更多的人應用于日常生活中。現在小型無人機產品中具有避障功能的不多,且由于無人機操作難度較高,具有避障功能的無人機往往安全性較高,用戶體驗性較好。無人機自動避障系統能夠及時地避開飛行路徑中的障礙物,極大地減少因操作失誤而帶來的各項損失,在減少炸機事故次數的同時,更能進一步推進無人機的普及。
本文結合激光雷達和SLAM算法,設計出一種新型的無人機避障系統。該系統彌補了無人機通訊飛控上的缺陷及避障策略不完善的不足,同時通過PC端地面站軟件,獲取無人機飛行及環境監測數據,實現了對無人機的遠程監測和控制,提升了無人機自動化和智能化的水平。
2 無人機雷達避障系統
2.1 激光雷達避障。通過對開源硬件Pixhawk進行二次開發,采用Rplidar A2激光雷達進行障礙物探測,其掃描頻率10Hz,可在周圍6米范圍內進行360度掃描,得到障礙物與無人機的距離和所成角度,完成整個障礙檢測過程。
2.2 超視距控制。無人機配備無線路由,通過機載樹莓派與云服務器連接,地面站軟件(PC端或手機APP)也與云服務器相連。該避障系統采用地面站軟件通過云服務器AZURE與無人機飛行控制器通訊的方式,依據MQTT協議進行數據傳輸,通過4G網絡,擺脫了遙控器信號傳輸距離短的限制,使得地面站能夠通過云服務器實時監測無人機飛行狀態,并將接收到數據轉化為當前無人機可視化飛行狀態,從而向無人機發送指令改變無人機當前狀態。
通過此通信系統進行數據傳輸,實現了對無人機的超視距控制。
2.3 地面站。為能實時監測無人機的飛行狀態并能在超視距時對飛行姿態進行控制,基于win10系統用C#編寫地面站軟件,PC端地面站完美替代遙控器,操控更為精確,數據可視化分析,通過4G通訊與云服務器AZURE進行數據傳輸。服務器和樹莓派之間也通過4G通訊實現數傳。實現了超視距監測無人機飛行狀態及周圍環境,直觀實時查看飛行姿態及飛行參數,并能向無人機飛行控制器發送姿態改變指令,實現超視距飛行。地面站軟件如下圖2.1所示。

3 結合SLAM算法實現路徑規劃
SLAM的中文名稱是即時定位與地圖構建,也叫做并發建圖與定位。SLAM問題可以描述為:無人機在未知環境中從一個未知位置開始移動,在移動過程中根據位置估計和地圖進行自身定位,同時在自身定位的基礎上建造增量式地圖,從而實現無人機的自主定位和導航。
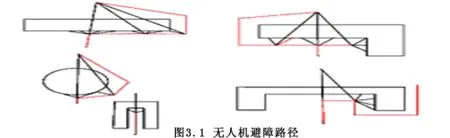
該避障系統采用結合SLAM算法自主設計的無人機遇障礙物轉向貼邊飛行的避障策略;在無人機遇到障礙物后執行簡單懸停動作,懸停穩定后,加入完整避障算法進行測試;根據避障效果進行路徑優化,符合避障策略后,與地面站軟件集成,形成完整的無人機避障系統,規避不規則障礙物。其避障路徑如圖3.1所示。
4 結論
該無人機避障系統使用激光雷達避障技術,以雷達的可靠性、受環境影響較小的優勢,較好地解決了傳統避障技術如超聲波避障和紅外線避障技術上的不足;使用基于SLAM算法的貼邊飛行的避障策略,提高了無人機在復雜情況下的飛行安全性。無人機避障具有較好的實用性和推廣性,大疆的Matrix 100、英特爾的TYPHOONH、零度的XPLORER2這三款產品均采用這種無人機前方障礙物避障的避障策略,無人機避障也可應用于軍事、民用、工業、農業等領域,該系統在同類產品中具有較廣闊的市場和較高的實用價值,能產生較大的經濟社會效益。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32