基于距離和姿態觀測量的GNSS基線網平差方法
2017-11-29 08:27:10白征東湯曉禹
測繪通報 2017年1期
白征東,湯曉禹,項 偉,2
(1. 清華大學地球空間信息研究所,北京 100084; 2. 空軍工程設計研究局,北京 100076)
基于距離和姿態觀測量的GNSS基線網平差方法
白征東1,湯曉禹1,項 偉1,2
(1. 清華大學地球空間信息研究所,北京 100084; 2. 空軍工程設計研究局,北京 100076)
針對目前單歷元算法需要連續觀測較長時間才能夠得到較為精確的解算結果的問題,利用載具同時架設3臺GNSS接收機,獲得基線觀測量,同時事先精確測定接收機之間的距離,并利用陀螺儀獲得載具的姿態角,通過增加距離和姿態觀測量,與基線觀測量共同進行平差處理,可以得到單歷元較為穩定而精確的坐標解算結果。試驗表明,平面精度在10 mm以內,高程精度在3 cm以內,相較于不添加距離和姿態觀測量的結果精度提高了15%以上。
GNSS;姿態約束;距離約束;平差處理
目前GNSS單歷元算法在定向、測姿及變形監測等領域得到了越來越廣泛的應用,這種方法不需要探測和修復周跳[1],但只有在長時間連續觀測的情況下才能夠達到較高的精度[2]。因此有必要增加觀測量和約束條件,從而使單歷元解算結果精度較高且穩定。
本文在現有GNSS單歷元算法的基礎上,設計3臺固定在載具上的接收機同時觀測,并提前測得3臺接收機之間的距離,利用陀螺儀提供姿態信息,從而提供距離和姿態約束,共同進行平差處理得到最終的坐標解算結果,并與沒有添加距離和姿態約束條件的結果進行比較。
1 算法研究
本文算法的核心是綜合利用基線條件、距離信息和姿態信息,對3個GNSS接收機的坐標進行約束平差,從而得到相較于單基線解算更為精確的結果。
為了方便姿態角的計算,需要將坐標由WGS-84坐標轉換到站心坐標ENU中[3],以基準站所在點作為坐標原點,在進行單歷元解算時,以3個接收機的坐標值作為待定參數,即
通過GNSS解算可以得到待定參數近似坐標為
3個接收機和基準站可組成6條基線,另外還有3個距離觀測量和3個姿態角觀測量,可以組成誤差方程,即
(1)

1.1 基線網誤差方程
GNSS網如圖(1)所示,O為基準站,a、b、c為載具上的3臺移動站,共構成了Oa、Ob、Oc、ab、ac、bc6條基線,根據GNSS網平差原理,可以列出誤差方程[4]為
(2)
權矩陣
(3)
式中
V1=[vEOavNOavUOavEObvNObvUObvEOcvNOcvUOcvEabvNabvUabvEbcvNbcvUbcvEacvNacvUac]T
I3為三階單位陣;D是由各觀測基線向量的協方差矩陣構成的塊對角陣。

圖1 基線網示意圖
1.2 姿態角誤差方程
陀螺儀在載具每運動一定距離時會提供一個角增量,利用積分便可以得到前后兩個測點之間姿態角的增量,在初始點利用GNSS進行較長時間的觀測可以求解得到高精度的初始姿態角,根據初始姿態角可以算得每個測點的姿態角觀測量。
姿態角包括偏航角y(yaw)、俯仰角p(pitch)和橫滾角r(roll),這3個角度共同定義了載體的姿態,即載體坐標系相對于當地水平坐標系的方位關系[5]。因此,姿態角求解的核心即為坐標系的旋轉變換[6]。
載體坐標系以主接收機為原點,X軸指向載體前進方向的垂直方向,Y軸為載體前進方向,Z軸為垂直于載體平面的方向,構成右手坐標系[7]。當地水平坐標系則是將站心坐標系的原點由初始原點移動至載體坐標系構成的坐標系。坐標系之間的關系如圖2所示。
載體坐標系到當地水平坐標系的轉換公式為
(4)
式中,Rb2l為3×3的轉換矩陣;Xb為載體坐標系坐標。由于接收機固定于載體上,因此載體坐標保持不變。

圖2 坐標系關系示意圖
利用直接法[8]可以得到
(5)
(6)
(7)
其中,由于高精度陀螺儀測得的姿態角誤差很小,為了簡化計算,可以將式(7)中的y、p用陀螺儀得到的偏航角yg、俯仰角pg代替進行計算,即
(8)

(9)
式中
(10)
(11)

(12)
l2=[ygpgrg]T-[y0p0r0]T
(13)
1.3 距離觀測量誤差方程
3臺GNSS接收機固定于載具上,它們之間的距離始終保持不變,在試驗前精確測定3點之間的距離Lab、Lac、Lbc,建立3條邊長觀測量的誤差方程為[9]
(14)
根據上面各式,可以將基線觀測量誤差方程、姿態角觀測量誤差方程和距離觀測量誤差方程組成一個統一的誤差方程,進行平差處理,即
(15)
三者的權需要根據觀測值精度的具體情況來確定,組成合適的權陣進行計算。
2 實例分析
以12月2日進行的試驗為例,利用上述方法對測得的GPS+BDS雙系統數據進行了分析處理。
載具上固定的3臺GNSS接收機之間的距離事先測定,見表1,其中ab方向為載具前進方向。

表1 各接收機距離 mm
以基準站O為站心,建立站心直角坐標系,通過坐標轉換公式[10]得到各接收機的站心坐標。在初始點靜止觀測較長時間,得到3個GNSS接收機精確的初始坐標見表2,初始姿態角見表3。
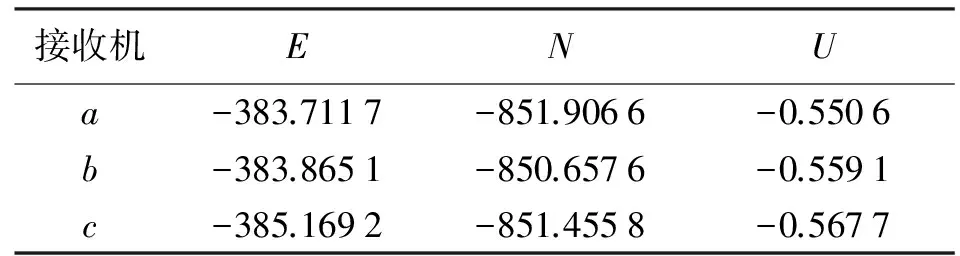
表2 各接收機初始坐標 mm

表3 初始姿態角
試驗中在各個測點依次進行了測量,共測量了5個點,將得到的數據分別利用常規基線網平差方法和上述添加了距離、姿態約束的平差方法進行了解算,得到的各個點的解算結果見表4。從表中可以看出,添加了距離和姿態約束以后,平差后得到的結果精度較正常基線網平差有了較大幅度的提高,標準差平均減小了15%以上,單歷元解算的最大偏差也得到了較大降低。通過這種方法處理后,E、N方向的最大誤差都在10 mm以內,標準差都基本控制在3 mm以內。而U方向的精度相對較差,這是由于GNSS單歷元算法本身高程方向精度較低,通過添加姿態、距離約束也難以從根本上改善,但相對不加約束的結果,也已經有了較大程度的提高。
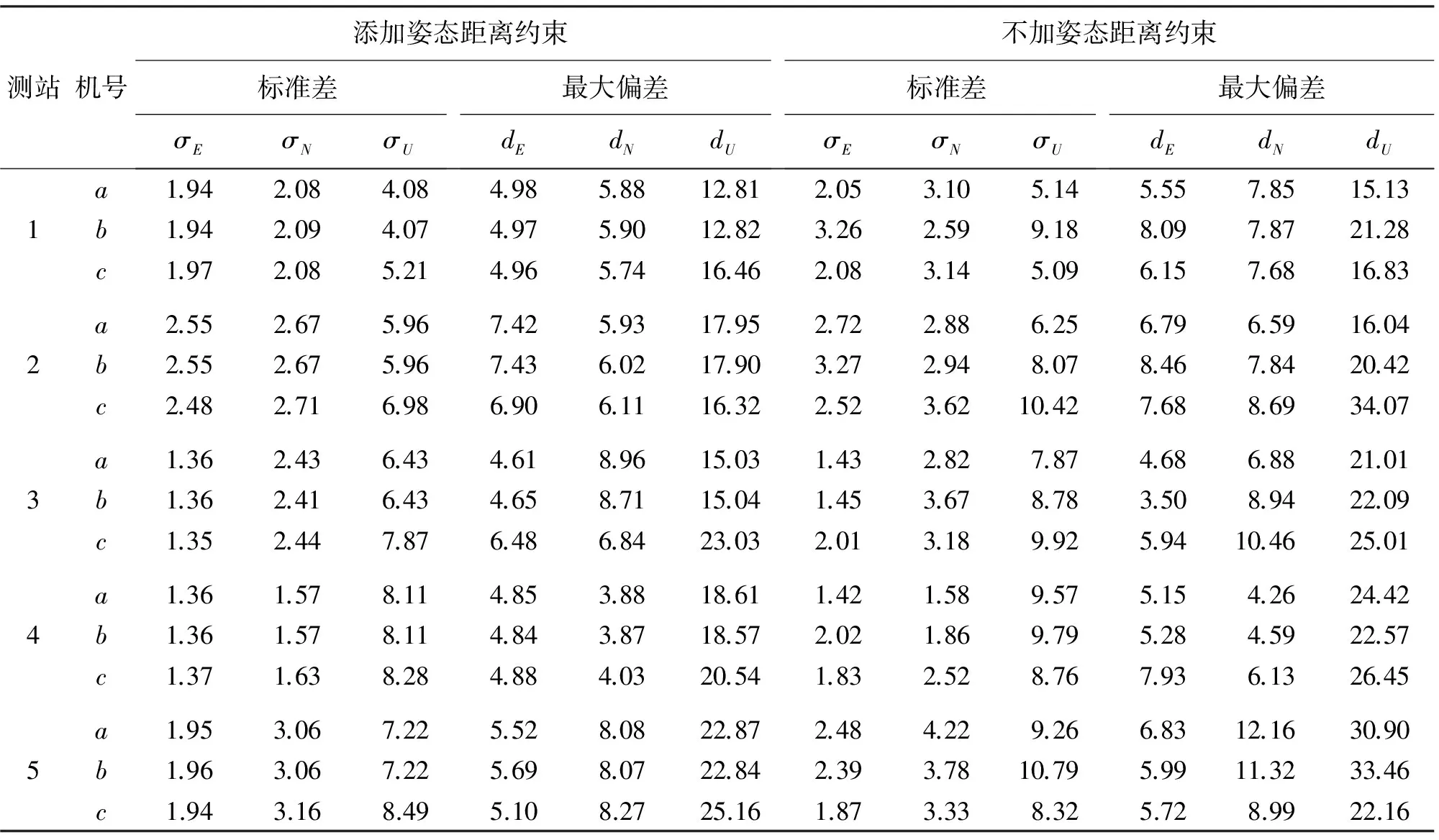
表4 添加距離姿態約束和不添加約束精度對比 mm
3 結束語
本文針對單歷元解算精度不能保證且不夠穩定的情況,利用3臺GNSS接收機同時測量,同時附加距離和姿態觀測量進行平差處理。利用這種方法,可以得到精度較高的點位坐標結果,其中,平面坐標最大偏差可以控制在10 mm以內,高程方向最大偏差在3 cm以內,較傳統單歷元算法有了較大的提高。可以看出,添加距離和姿態角觀測量進行平差,可以有效地提高解算精度,是一種可行的方法。
[1] 李征航,張小紅.利用GPS進行高精度變形監測的新模型[J].測繪學報,2002,31(3):206-210.
[2] 朱智勤.全球定位系統進行變形監測的新方法、模型及軟件研究[D].武漢:武漢大學,2001.
[3] 韓慧群.GPS姿態測量系統研究與開發[D].哈爾濱:哈爾濱工程大學,2005.
[4] 霍夫曼.全球衛星導航系統[M].北京:測繪出版社,2009:209-228.
[5] 陳林.GPS姿態測量系統的研究[D].重慶:重慶大學,2007.
[6] 邵奎.北斗與GPS雙系統測姿研究[J].測繪通報,2014(S1):219-223.
[7] 張宏兵,葛茂榮,過靜珺.GPS姿態確定原理及軟件設計[J].測繪通報,1999(12):27-29.
[8] 王潛心.機載GPS動態定位定速與定姿理論研究及軟件開發[D].長沙:中南大學,2011.
[9] 誤差理論與測量平差基礎[M].武漢:武漢大學出版社,2007:146-147.
[10] 王喚良,李星照,段祝庚.通過GPS測量獲得多種坐標數據[J].測繪通報,2003(8):29-32.
AGNSSBaselineNetworkAdjustmentMethodBasedonLengthandAttitudeMeasurements
BAI Zhengdong1,TANG Xiaoyu1,XIANG Wei1,2
(1. Institute of Geomatics, Department of Civil Engineering, Tsinghua University, Beijing 100084, China; 2. Engineering and Desinging Bureau of Airforce, Beijing 100076, China)
According to the fact that it takes a lot of time to obtain high precision results by single epoch algorithm, three GNSS receivers are erected on a carrier. The distance between the receivers are measured in advance, and the attitude angles of the carrier are measured by a gyroscope. Thus, the distance and attitude constraints are added to the baseline adjustment. Then a relatively stable and accurate result is achieved. The experiment results show that the maximum deviations are less than 10mm in the east and north directions, 30 mm in the elevation direction. The accuracy of the result is improved by more than 15% compared to the result without distance and attitude constraints.
GNSS; attitude constraints; distance constraints; network adjustment
P228
A
0494-0911(2017)01-0039-04
白征東,湯曉禹,項偉.基于距離和姿態觀測量的GNSS基線網平差方法[J].測繪通報,2017(1):39-42.
10.13474/j.cnki.11-2246.2017.0009.
2016-01-31
白征東(1968—),男,博士,副教授,主要研究方向為大地測量、衛星導航和定位。E-mail:zbai@tsinghua.edu.cn
