帶移動負載海上浮筒系統運動響應特性初步研究
2017-12-12 19:49:36吳寶山
宇航總體技術 2017年4期
關鍵詞:系統
吳寶山,吳 瀾
(中國船舶科學研究中心水動力學國家重點實驗室,無錫214082)
帶移動負載海上浮筒系統運動響應特性初步研究
吳寶山,吳 瀾
(中國船舶科學研究中心水動力學國家重點實驗室,無錫214082)
將某類海上自動作業系統簡化為帶移動負載的浮筒系統,其中負載簡化為外徑為180mm、約50kg重的柱型體,浮筒為外徑533mm的圓筒;初步設計了浮筒系統的主參數。在此基礎上,采用頻域數值模擬計算,獲得了浮筒自由狀態下的固有周期和運動響應傳遞函數 (RAO);再采用時域模擬方法,預報了3級海況下(JONSWAP譜)浮筒系統整體的運動響應特性,給出了運動響應幅值、最小干舷高度等特性參數,可為相關裝備設計提供技術參考和借鑒。
海上浮筒;移動負載;運動響應
0 引言
海上浮筒具有結構簡潔、耐波性能良好、成本低等優勢,廣泛應用于海洋環境監測、波浪發電等。1977年Woods Hole研究所Berteaux[1]綜合分析了浮筒的性能。Mavrakos等[2]通過數值模擬和試驗證明設置浮筒可改善系泊纜動力特性。Carpenter等[3]對圓柱形浮標和圓盤形浮標在隨機波下的響應進行數值模擬和試驗,發現圓柱形浮標對涌浪的垂蕩響應較大,圓盤形浮標對涌浪的橫搖響應較大。Leonard等[4-5]對球形、柱形、圓盤形3種浮標在波浪中響應的數值解和試驗結果進行了對比。曲少春[6]等建立了浮標在波浪激勵下的運動方程,計算了不同海況下浮標的運動參數輸出。孫辰[7]設計了某小型深海資料浮標,并進行了浮標水動力學仿真。
本文針對某類海上自動作業系統,將其簡化為帶移動負載的浮筒系統,其中負載簡化為外徑180mm、約50kg的柱型體,浮筒為外徑533mm的圓筒。經過初步設計,確定浮筒系統的主參數,建立浮筒系統水動力模型,并對其在波浪中的運動性能進行分析,結果表明該系統在3級海況下運動性能良好,可作為穩定的海上自動作業平臺。
1 浮筒系統主要參數
本文簡化設計的帶移動負載的浮筒系統示意圖見圖1,其中b為浮筒,簡化為中空的圓柱體;負載p簡化為實心圓柱體,承載于浮筒中空的內部結構上,可上下滑動。參考浮標設計相關標準[8],設計確定浮筒和負載的主要參數見表1。
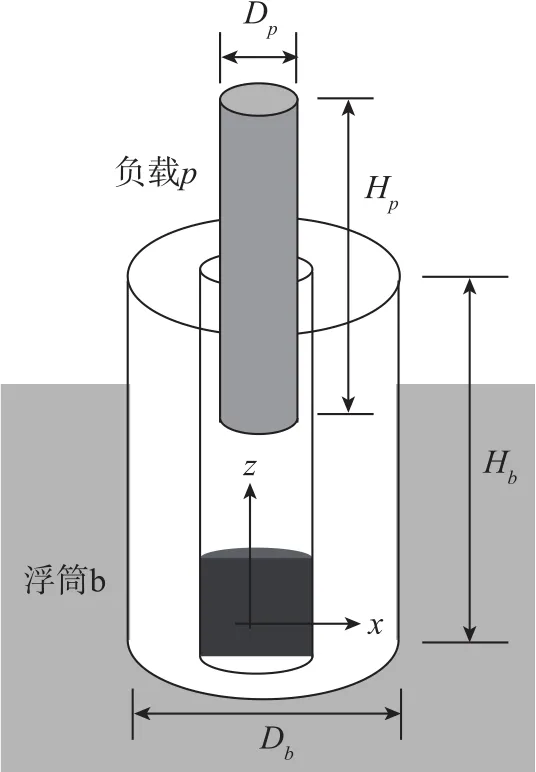
圖1 浮筒系統示意圖Fig.1 Diagram of buoy with moving payload
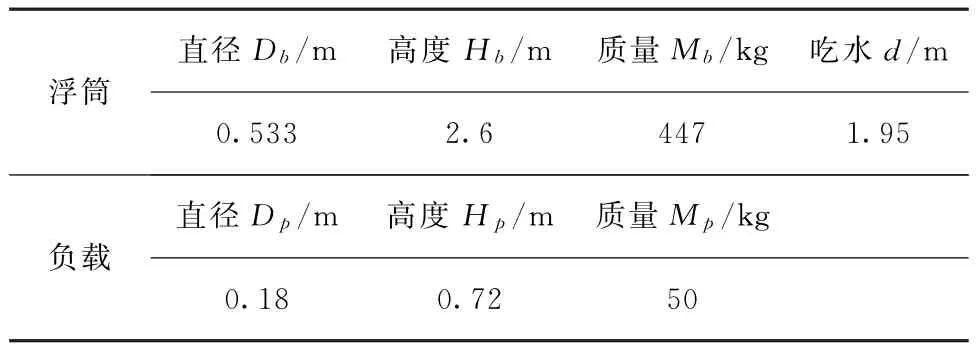
表1 浮筒和負載主參數Tab.1 Particulars of buoy with moving payload
負載上下滑動會影響浮筒系統整體的運動特性。本文采用準靜態假設,選取負載進入浮筒深度分別為H p/4、H p/2、3H p/4、H p的狀態,分析浮筒系統整體的運動特性。各負載進深狀態下的浮筒系統整體重心、浮心及初穩性高的計算結果見表2。負載進深3H p/4時的初穩性高最小(0.51m),為正值且較大,符合初穩性平衡條件。
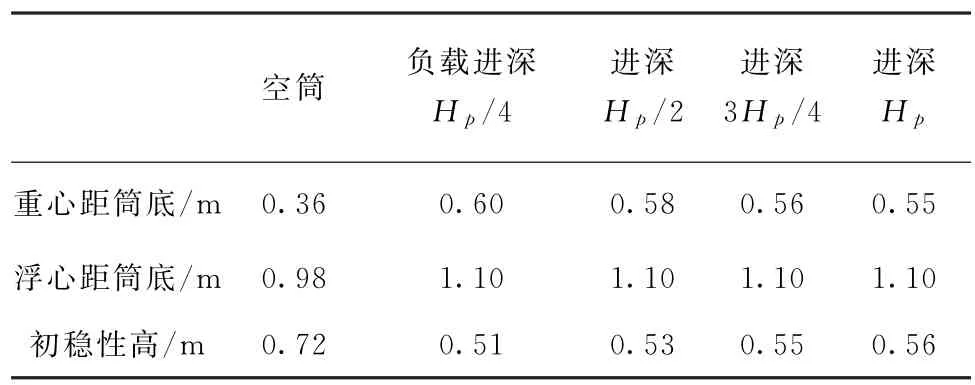
表2 不同進深下浮筒系統重心、浮心和初穩性高Tab.2 Centers of gravity and buoyancy of buoy with payload moving
2 浮筒系統運動響應計算方法
進行浮筒裝置運動響應分析時采用勢流理論,流場中的速度勢存在并滿足Laplace方程和4類邊界條件:自由面條件、浮體濕表面條件、海底條件和輻射條件。
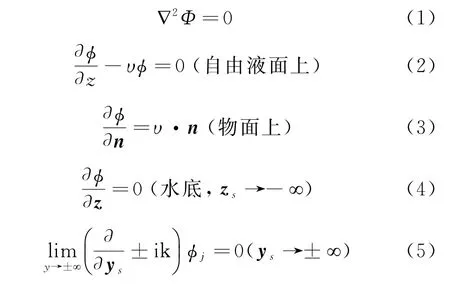
其中,?為速度勢,υ是浮體運動的線速度,n為濕表面上單位法線向量,指向浮體內部。
根據Laplace方程和邊界條件可以唯一確定速度勢,再按照Bernoulii公式計算物體濕表面上的壓力分布:

將壓力分布P在浮筒濕表面積分,可以得到其受到的波浪激勵力F j。

將波浪力代入浮筒系統運動方程 (8)進行頻域計算[9-10]:

其中,M為慣量矩陣,Ma為附加質量系數矩陣,C為線性阻尼系數矩陣,K為靜水力恢復系數矩陣,F為單位波幅下的1階波浪力,X為1階運動響應RAO,表征浮筒系統隨頻率變化的運動響應特性。
對浮筒裝置進行時域水動力預報時,根據運動方程 (9),調用由頻域計算得到的附加質量、單位波長的繞射力、漂移力等數據,計算在給定波譜條件下的運動時歷[11-12]:

其中,Fsv為漂移力,Fwf為繞射力,Fh為靜水恢復力。給定浮筒的初始位置和速度,每個時間步計算出浮筒受到的外力,根據式 (9)計算加速度,進而通過積分獲得浮筒的速度和位移,作為下一時間步的輸入,迭代求解,得到浮筒系統的運動響應時歷。本文的分析計算采用JONSWAP譜:
3 浮筒系統運動響應分析
3.1運動響應RAO結果分析
采用頻域計算方法,對不同負載進深下浮筒系統的運動響應進行預報,得到垂蕩、搖擺附加質量和阻尼 (圖2、圖3),垂蕩和搖擺運動響應RAO如圖4所示,垂蕩和搖擺運動周期如表3所示。由表3可知,浮筒系統的搖擺和垂蕩周期最大分別為2.84s和3.10s,避開了波浪的譜峰周期。
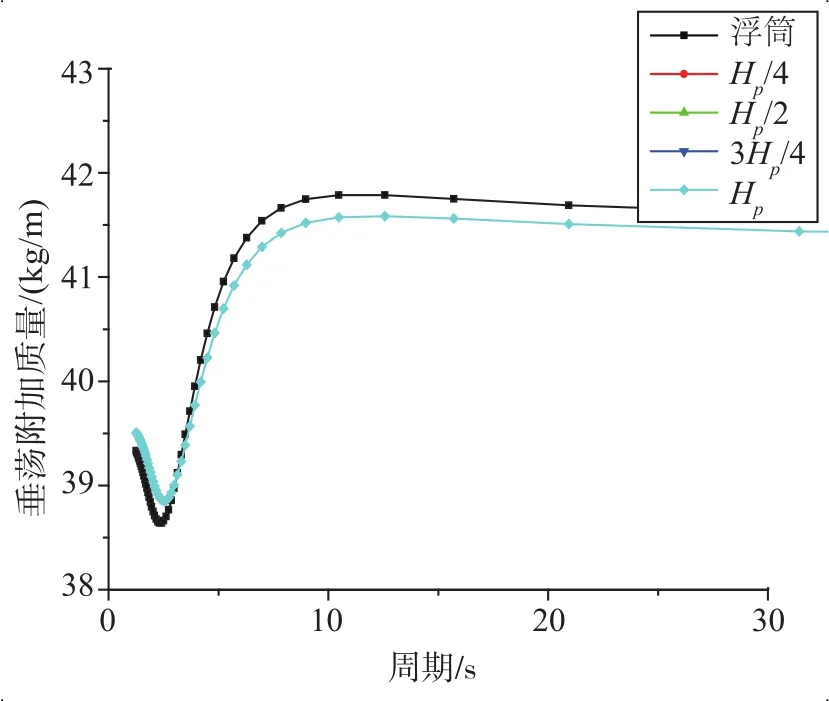
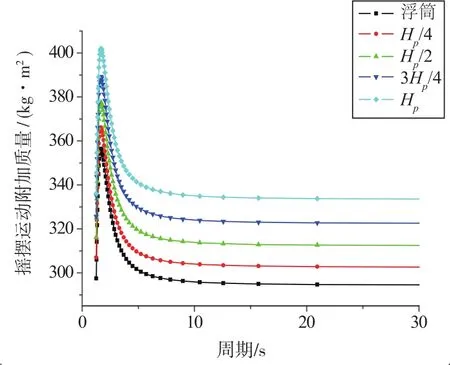
圖2 不同負載進深狀態浮筒系統附加質量Fig.2 Added mass of buoy with moving payload
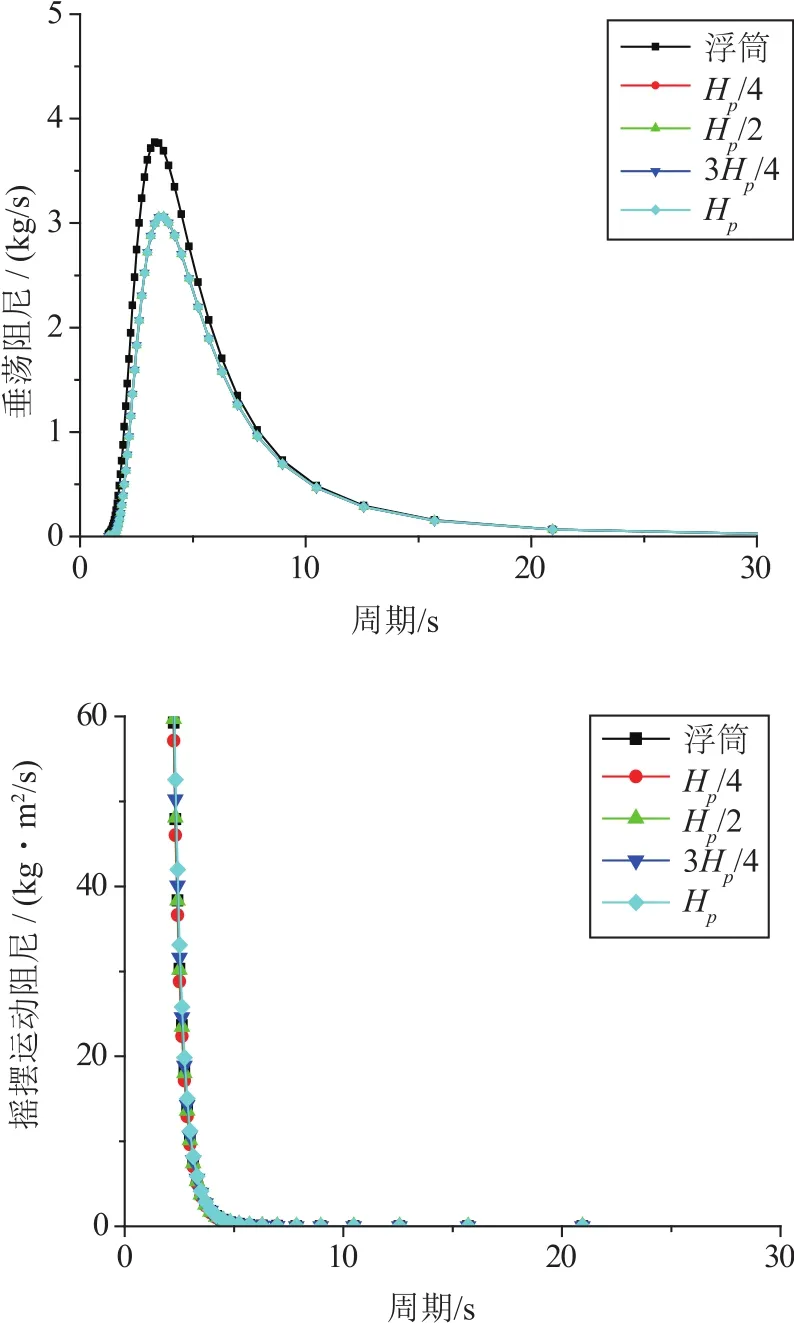
圖3 不同負載進深狀態浮筒系統輻射阻尼Fig.3 Radiation damping of buoy with moving payload
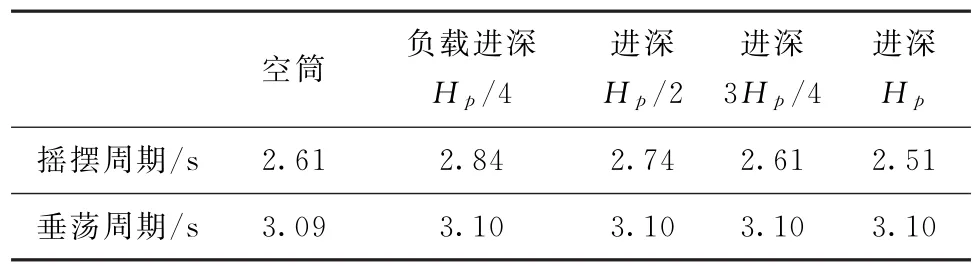
表3 不同負載進深下浮筒系統的固有周期Tab.3 Natural cycle of buoy with moving payload in calm water
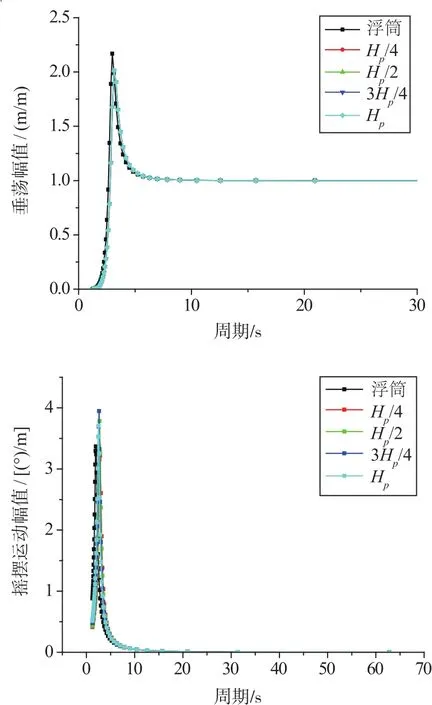
圖4 不同負載進深狀態浮筒系統RAOFig.4 RAO of buoy with moving payload
3.2 運動響應時歷結果分析
對不同負載進深下浮筒系統在波浪中的運動進行時域計算,將浮筒系統作業海況設定為3級,采用JONSWAP譜,有義波高1.25m,譜峰頻率為0.881rad/s。負載進深H p/4狀態下的浮筒系統垂蕩和搖擺運動時歷曲線見圖5~圖7。對各狀態的運動時歷曲線進行統計分析,結果如表4所示。
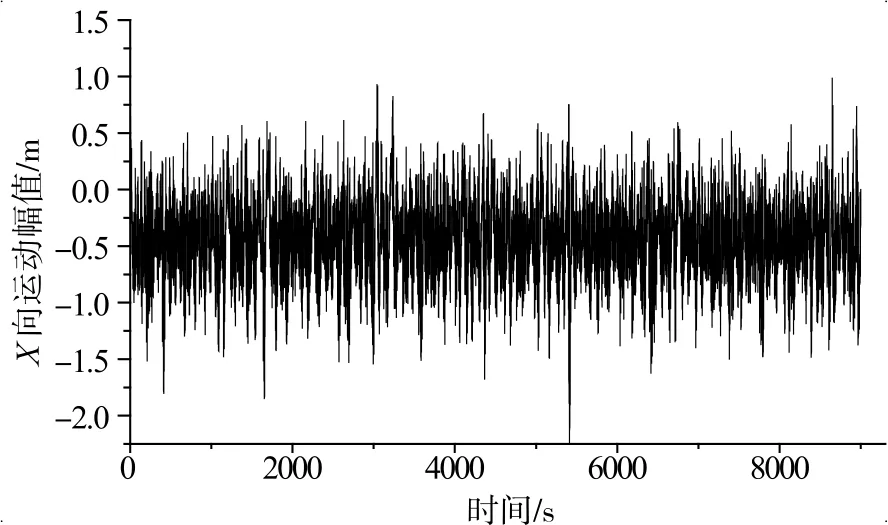
圖5 浮筒系統橫向運動時歷曲線(負載進深H p/4)Fig.5 Typical time history of lateral motion of buoy system
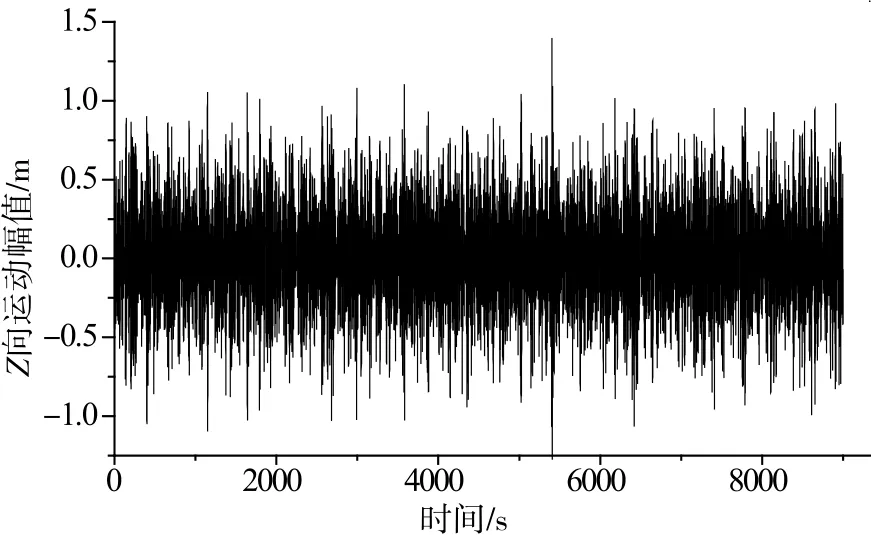
圖6 浮筒系統垂向運動時歷曲線(負載進深H p/4)Fig.6 Typical time history of vertical motion of buoy system
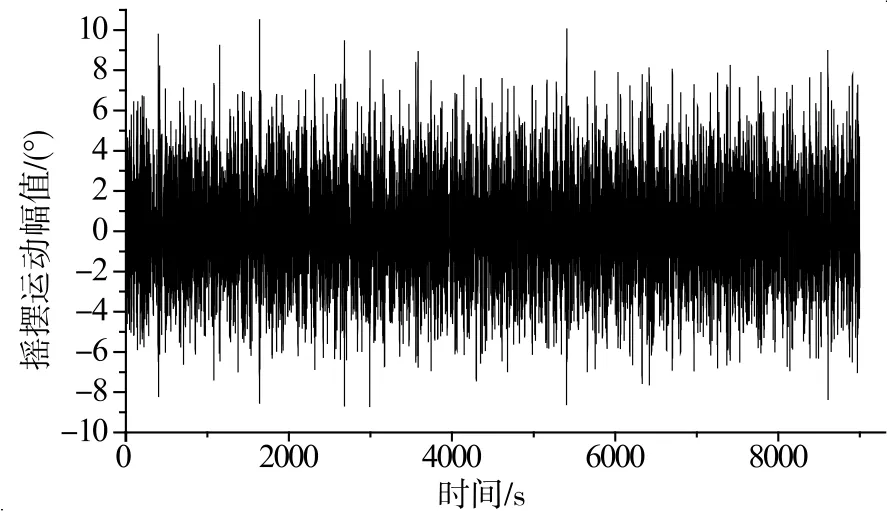
圖7 浮筒系統垂向運動時歷曲線(負載進深H p/4)Fig.7 Typical time history of rolling motion of buoy system
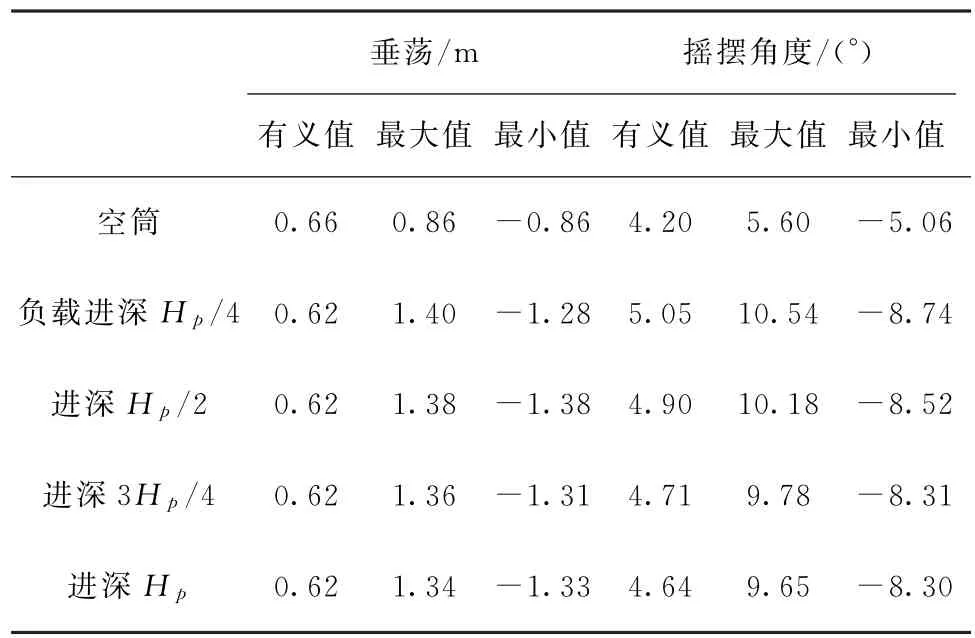
表4 不同進深下浮筒系統運動響應統計值Tab.4 Statistic parameters of motion of buoy system
由表4可知,隨著負載進深的增加,重心位置降低,穩性高和恢復力矩增大,浮筒系統縱搖角度逐漸減小。負載進深H p/4時,浮筒縱搖響應最大,幅值為10.5°。參考相關設計標準[8]的規定(建議最大擺角不超過15°),該方案中浮筒系統在波浪中的運動響應能夠滿足要求。
為評估浮筒在波浪中搖擺位移幅值大小,需要對浮筒在XZ面的搖擺運動特點進行分析。負載進深H p/4時,在距離浮筒底部不同高度處布置6個監測點,計算得到的不同監測點搖擺過程中偏離初始位置的線位移幅值見圖8。
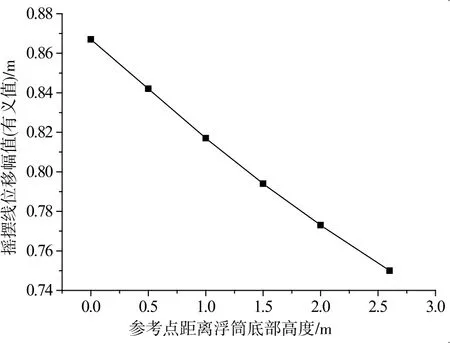
圖8 浮筒沿高度不同測點處位移幅值 (有義值)Fig.8 Displacement amplitude of different positions along buoy's vertical centerline
從圖8可看出,浮筒在波浪中運動時底端 (高度0m)的搖擺幅度最大,浮筒頂端(高度2.6m)最小。不同負載進深的狀態下,浮筒端部的搖擺位移統計值結果見表5。由表5可知,隨著負載進深增大,浮筒搖擺線位移變化不大。
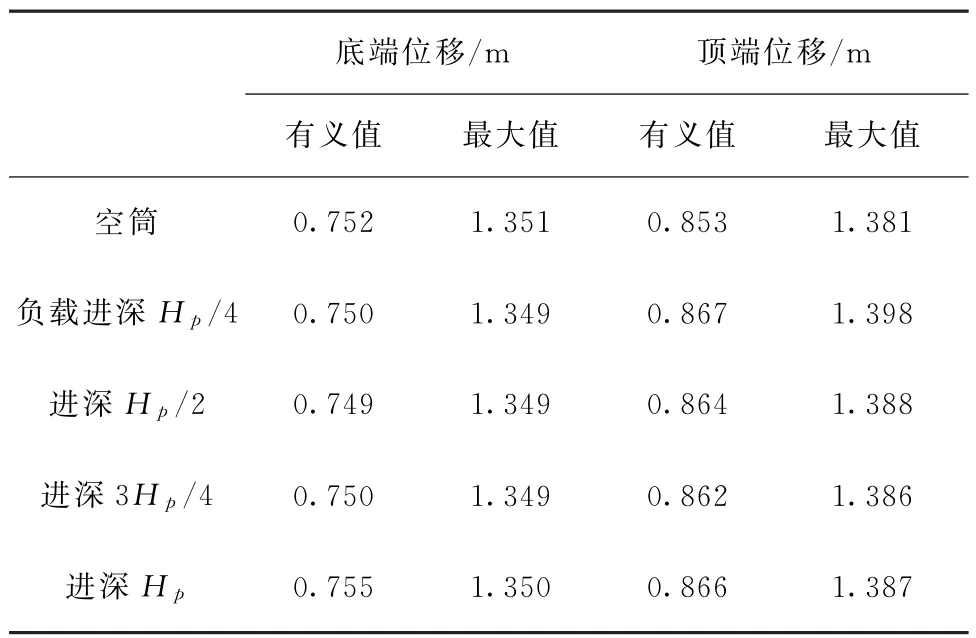
表5 不同進深下浮筒最大搖擺幅值Tab.5 Maximum displacement amplitude of buoy system
3.3 浮筒最小干舷分析
通過時域計算,可得到浮筒與波面實時的相對運動。波面在浮筒表面的相對爬升高度為理論的最小干舷高度。不同負載進深時計算得到的浮筒最小干舷結果如表6所示。
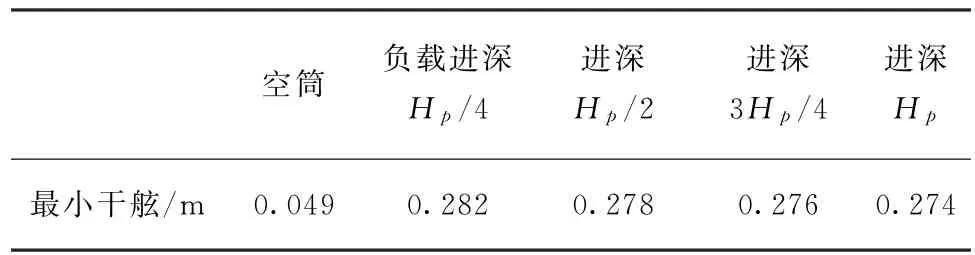
表6 不同負載進深下浮筒裝置最小干舷Tab.6 Minimum freeboard of buoy system
由表6可知,浮筒所需最小干舷隨負載進深的增加而減小,設計浮筒最小干舷取決于負載進深H p/4時的狀態。針對3級海況作業條件,浮筒的干舷不應小于0.282m。但本文的結果是基于線性計算分析,沒有考慮波面的非線性爬升和波浪本身的非線性等因素,也沒有考慮波浪的飛濺,因此,實際干舷高度的選取需在此基礎上留有足夠的安全余量。
4 結論
1)針對設計的帶有移動負載的浮筒方案,預報了浮筒系統整體在3級海況下的垂蕩運動最大幅值1.40m,搖擺運動最大幅值10.54°,具有較為良好的運動響應特性。
2)隨著負載進入浮筒深度增大,浮筒搖擺角度減小,垂蕩運動變化不大。
3)浮筒系統所需最小干舷隨著負載進深的增大而減小,設計中應參考負載進深最小的工況確定浮筒的最小干舷。
[1] Berteaux H O.Buoy engineering[M].New York: A Wiley Imterscience Publications,1976.
[2] Mavrakos S A,Neos L,Papazoglou V J.Systematic evaluation of the effect of submerged buoys'size and location on deep water mooring dynamics[C].Proceedings of the 4thInternational Symposium on Practical Design of Ships and Mobile Units(Varna,Bulgaria),1989:1-8.
[3] Jenkins C H,Leonard J W,Walton J S,et al.Experimental investigation of moored-buoys using advanced video techhiques[J].Ocean Engineering, 1995,22(4):317-335.
[4] Carpenter E B,Idris K,Leonard J W,et al.Behaviour of a moored discus buoy in an ochi-hubble wave spectrum[C].International Conference on Offshore Mechanics An Arctic Engineering(Huston),1994:492.
[5] Leonard J W.Idris K,Yim S C S.Large angular motions of tethered surface[J].Ocean Engineering, 2000,27(12):1345-1371.
[6] 曲少春,鄭琨,王英民.圓柱形浮標運動分析與仿真[J].計算機仿真,2010,27(6):363-367.
[7] 孫辰.“白龍”浮標標體設計及動力學分析[D].杭州:杭州電子科技大學,2014.
[8] 中華人民共和國交通運輸部.浮標通用技術條件:JT/ T760-2009[S].北京:人民交通出版社,2009.
[9] 吳瀾,吳寶山,匡曉峰,等.基于AQWA的半潛式平臺水動力特性研究[J].中國海洋平臺,2014, 29(5):29-33.
[10] 吳瀾,匡曉峰,范亞麗.半潛平臺浮子式系泊系統參數優化研究[J].海洋工程,2016,34(4):30-37.
Characteristics of Response of Buoy with Moving Payload at Sea
WU Bao-shan,WU Lan
(National Key Laboratory of Science and Technology on Hydrodynamics, China Ship Scientific Research Center,Wuxi 214082,China)
Some kind of operation system at sea was simplified to a buoy with a moving payload inside,where the buoy is a floating cylinder with outer diameter of 533mm and the payload a cylinder with outer diameter of 180mm and weight of 50kg.Such a buoy system is designed to operate under the sea state 3 with adequate stability.Its natural cycle in calm water and RAOs of motion in waves are calculated by numerical simulation with frequency domain method.Thereafter,the time history of motion of the buoy system under the sea state 3 was obtained through time domain method,where the JONSWAP wave spectrum was adopted.As results,the amplitudes of buoy's motion are presented and the buoy's freeboard recommended.
Freeboard of buoy;Motion response;Buoy with moving payload
P751
A
2096-4080(2017)04-0008-06
2017-09-14;
2017-10-30
水動力學重點實驗室基金(61422030209162203002);工信部數值水池創新專項
吳寶山(1968-),男,博士,研究員,主要研究方向為船舶與海洋工程水動力學。
吳瀾(1988-),女,碩士,工程師,主要研究方向為船舶與海洋工程水動力學。E-mail:wulan135@126.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32