無人水下航行器的發展現狀與關鍵技術
2017-12-12 19:49:04王童豪彭星光徐德民
宇航總體技術 2017年4期
王童豪,彭星光,潘 光,徐德民,2
(1.西北工業大學航海學院,西安710072; 2.西北工業大學無人系統發展戰略研究中心,西安710072)
無人水下航行器的發展現狀與關鍵技術
王童豪1,彭星光1,潘 光1,徐德民1,2
(1.西北工業大學航海學院,西安710072; 2.西北工業大學無人系統發展戰略研究中心,西安710072)
無人水下航行器(Unmanned Underwater Vehicle,UUV)包括遙控水下航行器(Remotely Operated Vehicle,ROV)和自主水下航行器(Autonomous Underwater Vehicle,AUV),是海洋科學研究、資源開發和維護海洋權益不可或缺的重要裝備,日益受到世界海洋國家的高度重視,并競相大力發展。闡述了國外UUV的發展現狀與應用情況,分析了AUV的關鍵技術及其發展趨勢。
無人水下航行器;遙控水下航行器;自主水下航行器
0 引言
海洋是地球表面最大的自然地理單元,擁有地球表面積的70.8%,總水量的97%。從太空中望去,地球是一顆明珠般的藍色水球。海洋蘊藏著巨大的能量和資源,在經濟、政治和軍事上具有舉足輕重的戰略意義,是世界各臨海國家爭相開發利用的 “藍色疆土”。近年來,圍繞海洋開發、海洋環境安全和海洋權益維護,國際上展開了新一輪的海洋競爭。當前一輪的海洋競爭是以高科技為依托的軍事競爭、經濟競爭和科技競爭,海洋科技水平和創新能力在未來的海洋競爭中將占據主導地位。我國近年來進一步提高了對海洋權益和海洋資源的重視程度。2012年,黨的十八大報告明確提出 “提高海洋資源開發能力,發展海洋經濟,保護海洋生態環境,堅決維護國家海洋權益,建設海洋強國”的戰略部署。2013年,習近平總書記強調 “要進一步關心海洋、認識海洋、經略海洋,推動我國海洋強國建設不斷取得新成就”。作為海洋開發利用和海洋安全保障的重要技術手段,無人水下航行器(Unmanned Underwater Vehicle,UUV)是建設海洋強國不可或缺的裝備,是海洋競爭中的有力武器。本文總結了國外UUV的發展現狀,詳細討論了自主水下航行器(Autonomous Underwater Vehicle,AUV)相關的關鍵技術,并對其發展趨勢做出分析。
1 UUV的發展現狀
20世紀60年代以來,世界上約20個國家研發了近200種各種類型的UUV,服務于軍事、海洋工程應用和部分軍民兩用領域。
國際上,以美國、英國、法國、俄羅斯、德國等國家為代表的世界各國都投入了很大力量,進行UUV的研發。美國海軍于2000年制定了UUV發展主計劃(UUV Master Plan),并于2004年對該計劃進行了修訂。2007年和2013年,美國國防部相繼制定了2007—2032無人系統路線圖(Unmanned Systems Roadmap)和2013—2038無人系統路線圖,將海陸空三位一體聯合進行協同發展。英國南安普頓國家海洋中心于2013年宣布,英國自然環境研究委員會在2015年之前投入1000萬英鎊用于開展海洋機器人的研究和開發。
20世紀90年代以來,我國有關高校和研究所相繼開展了UUV的研發工作,取得了比較顯著的進展和研發成果,但力量比較分散,至今尚未形成完整、系統的發展規劃,研發力度和水平與發達國家相比仍有不小的差距,不能完全滿足我國海洋開發利用和安全保障的需求。
1.1 UUV的分類
UUV可在水下自航運動,具有感知能力,通過遙控或自主方式代替或輔助人力完成某些水下使命和任務,一般分為兩類:
1)遙控水下航行器(Remotely Operated Vehicle,ROV):需要操作員通過電纜或聲學通信系統傳送指令進行遙控。
2)自主水下航行器:執行任務時不需要操作員監視和操控。
1.2 ROV發展現狀
ROV的研制開始于20世紀50年代,80年代發展到較高水平。其功能多種多樣,在民用方面主要用于海上石油與天然氣等資源開發、港口/水庫大壩的水下檢查等;在軍用方面主要用于反水雷戰 (如水雷探測、遙控滅雷具)、打撈丟失海底試驗武器(如魚雷)等。ROV的主要特點為:
1)有水面支持系統;
2)拖帶線纜;
3)裝載機械手可水下作業;
4)活動空間范圍有限。
1960年美國海軍研制了世界上第一臺ROV—CURV,用于打撈丟失在水下的海軍實驗軍械。1966年它在西班牙外海869m深處打撈起一顆失落在海底的氫彈。CURV長5m,重1400kg,裝有4個浮筒,搭載攝像機、探照燈和打撈用的機械手等。
1995年,日本的ROV“海溝(KAIKO)”號 (圖1)到達世界上最深的馬里亞納海溝,創下10911米無人探測的深度記錄。發現了沉積巖心,拍到了許多生物照片,獲得了大量的深海考察數據,對太平洋地區地震和海洋生物研究有重要作用。2003年5月,在某次執行任務的過程中,“海溝”號由于線纜斷裂丟失。

圖1 “海溝”號搖控水下航行器[1]Fig.1 The“KAIKO”ROV[1]
“雙鷹(Double Eagle)”ROV由瑞典SAAB公司研制,第一代于1984年在瑞典海軍服役,至今已發展了四代,并相繼被丹麥、荷蘭及澳大利亞等國家的海軍裝備,用于清除水雷。其最新型號自身質量為530kg,最高航速6節,可在500m深處作業。它由7個無刷電機作為主要動力來源,可在6個自由度上運動。
隨著各國對海洋工程相關領域的不斷重視, ROV的研發水平和規模也在蓬勃發展,取得了長足進步。其中具有代表性的生產廠家有美國Oceaneering公司,英國Seaeye公司和加拿大的Seamor航海公司等,如圖2所示。

圖2 典型ROVs[2-4]Fig.2 Typical ROVs[2-4]
1.3 AUV發展現狀
AUV無人、無纜,完全自主航行,是代表UUV發展方向的高新技術,是發達國家海軍和海洋技術研究發展的熱點之一。其主要特點為:
1)自治能力強;
2)活動空間大;
3)智能化水平高;
4)適應能力強;
5)實用性好;
6)隱蔽性好。
美國作為海洋強國之一,擁有多個系列AUV,各自應用于不同的領域。美國伍茲霍爾海洋研究所(Woods Hole Oceanographic Institution)海洋學實驗室研制的REMUS系列AUV被用于檢測海洋環境狀況、沿海搜索等任務。
Odyssey I~IV是麻省理工學院AUV實驗室(MIT AUV Lab)研發的系列產品。Caribou是一種Odyssey III型AUV,長2.6m,質量約400kg,工作深度為3000m,最大下潛4500m,可代替偵察船對危險海域進行監視,也能協助水面作戰艦艇完成作戰任務。Odyssey IV(圖3)型繼承了Odyssey II型的流線外形,能量轉化率高,機動性好,下潛深度大。
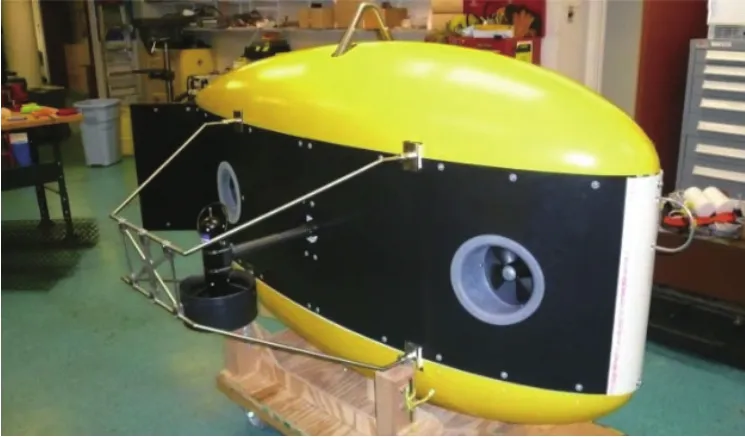
圖3 “Odyssey IV”AUV[5]Fig.3 “Odyssey IV”AUV[5]
英國南安普敦國家海洋中心(National Oceanography Centre,Southampton)研制的Autosub AUV配備有聲學多普勒流速剖面儀、溫鹽深儀、氧含量傳感器、視距測量計、熒光計,以及用于航行器控制的測量位置、姿態、高度、深度的多種傳感器,是一個遠航程、大航深的多用途海洋調查與監視平臺。
俄羅斯早在20世紀60年代蘇聯時期就開始研制AUV,其MT-88長3.8m,寬1.1m,高1.2m,質量1150kg,采用模塊化結構,主要用于海洋研究和海洋觀測[6]。MT-88下潛和上浮通過采用鑄鐵壓載完成,它攜帶兩個壓載下潛,到達指定深度后拋掉其中一個壓載,任務完成后拋掉另一個壓載。
日本的r2D4號AUV采用鋰離子二次電池,采用慣導+DVL計程儀的組合導航方式。2007年,r2D4通過攜帶的側掃聲納和水下攝像機等設備在印度洋海底發現了世界最大的熔巖平原[7]。
綜上所述,隨著各國海洋相關戰略的不斷推進和水下設備相關技術的快速發展,UUV已成為世界各國維護海洋權益必不可少的裝備,在航程、航深和自主性方面得到了飛速發展。然而,目前UUV仍無法執行復雜任務,因此其智能性的發展成為UUV技術突破的關鍵。
2 UUV的主要應用
UUV作為一種無人平臺,在民用和軍用領域都扮演著極其重要的角色。本文從海洋工程和軍事領域兩方面介紹UUV的用途。
2.1 UUV在海洋工程中的應用
發展是人類社會永恒不變的主題。蘊藏在海洋和海底豐富的石油、天然氣、可燃冰和各類金屬礦石等礦產資源遠未被充分開發和利用,是未來人類社會繁榮發展的重要保障。相比載人潛器和水面船拖曳設備,使用UUV對海洋資源進行勘探和取樣效率更高,成本更低,使用更方便,工作時間更長,安全性更加有保障。UUV在海洋工程中的應用主要集中在以下方面:
(1)海洋資源勘察
1977年,美國科學家首次在2000m深的海底發現了冒出濃煙般的熱泉,在熱泉 “黑煙囪”周圍的海水中,活躍著各類生物種群,深海生物基因研究是探究地球生命起源的重要組成部分。近年來,隨著相關技術的不斷發展,越來越多的UUV加入到深海熱泉的探測與考察的隊伍中來。在國內,參與深海熱泉探測任務的有 “海龍2號”ROV和“潛龍二號”AUV。
“CR-01”6000米AUV在1995年和1997年兩次赴南太平洋海域參加中國大洋協會海底資源調查,進行海底多金屬結核豐度測量,使我國被聯合國批準為第5個深海采礦的先驅投資者,最終擁有對礦產資源最豐富的7.5萬平方公里海域的優先開采權。
(2)水下搜救
2005年8月4日,俄羅斯軍方一艘搭載7名船員的“AS-28”型小型潛艇(圖4)在進行例行訓練時撞上漁網無法上升到海面,在俄羅斯東北部堪察加灣海域深190米的海底擱淺,由英國 “天蝎45”ROV(圖5)剪斷纜繩后成功獲救。2014年4月,在MH-370飛機殘骸的搜尋過程中,美國海軍在可能失事的水域部署了Bluefin-21 AUV (圖6)進行深海搜索。同年,美國兩架ROV還被應用到韓國 “歲月號”客輪的搜救行動中。

圖4 俄羅斯“AS-28”型潛艇Fig.4 “AS-28”submarine of Russia
(3)海底打撈
2004年5月,美國北島海軍航空站的潛艇營救隊在加利福尼亞外海用 “超級天蝎”號ROV打撈起了在飛行訓練中墜毀的F14-D“雄貓”戰機的殘骸。“超級天蝎”號自身負重可達100kg,兩只

圖5 英國“天蝎45”ROVFig.5 “Scorpio 45”ROV of the U.K.

圖6 “Bluefin-21”AUV[8]Fig.6 “Bluefin-21”AUV[8]
機械臂最大伸展時每只可舉起110kg的物體。
此外,UUV還在水文調查、港口安全、漁業作業、科學取樣、海圖繪制和核電站維護等領域發揮著不可取代的作用。
2.2 UUV在軍事領域中的應用
根據美國海軍公布的UUV總體規劃,軍用UUV的作戰任務為:
1)情報、監視、偵察;
2)反水雷戰;
3)反潛戰;
4)檢查/識別;
5)海洋調查;
6)通信/導航網絡節點;
7)負載投送;
8)信息作戰;
9)時敏打擊。
2003年3月,美國海軍在進入伊拉克的烏姆蓋斯爾港時,利用REMUS 100自主水下航行器(圖7)在強海流和低能見度條件下進行反水雷任務,用16h完成了人工21d才能完成的排雷任務,減少了戰術時間,將雷區的威脅降到最低限度。
REMUS 100根據預先編制好的航行任務規劃,對大范圍水域進行搜索探測水雷目標。航行深度100m,單次執行任務可以航行60nm,在3節速度下可航行20h,以最大巡航速度5節航行的航時可達8h。
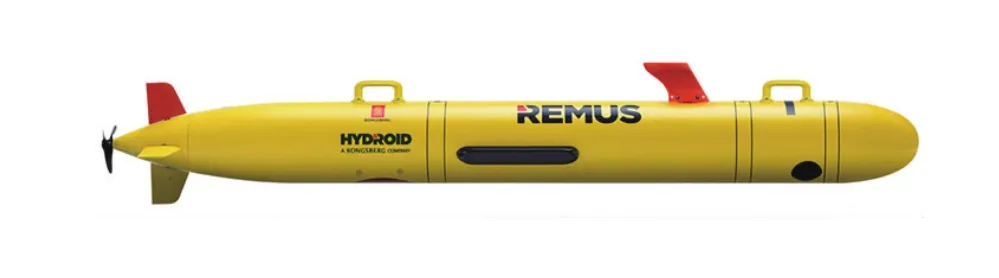
圖7 參與排雷的REMUS 100[9]Fig.7 REMUS 100 with defense application[9]
如圖8所示,近期水雷偵察系統(Near-Term Mine Reconnaissance System,NMRS)是美海軍已裝備的ROV,它由潛艇魚雷管發射,由潛艇操作員通過56km長的光纜控制,主要完成情報搜集、監視、偵察和水雷的搜索與識別等任務。
此外,美國海軍還為 “洛杉磯”級攻擊型核潛艇裝備了遠期水雷偵察系統(Long-Term Mine Reconnaissance System,LMRS)。LMRS是用NMRS系統改進的AUV,總長為6.1m,與母艦之間采用聲信號通信。LMRS從魚雷發射管發射,可完全自主地在水下對水雷進行搜索,續航能力超過40h,每天可搜索的海區面積為120km2。探雷結束時,系統可自動返回潛艇,由潛艇右舷魚雷發射管中的機械手回收到發射管中。

圖8 “NMRS”ROVFig.8 “NMRS”ROV
1996年,美國著手研發Manta無人作戰平臺,如圖9所示。根據其設計構想,該AUV懸掛在攻擊型核潛艇外部,攜帶魚雷和超空泡武器,配合母艇完成水下環境偵察和魚雷攻擊任務,包括偵察、探測、攻擊敵潛艇,或探測水中兵器;還可在兩棲作戰中對沿海淺水區隱蔽進行探測、偵察。
3 AUV關鍵技術

圖9 “Manta”無人作戰平臺Fig.9 “Manta”unmanned combat platform
UUV的各項關鍵技術是保證UUV順利完成任務的重要保障,是UUV研究的重點領域。其中ROV的關鍵技術有遙控技術、通信技術、動力推進技術、人機交互技術、平臺設計技術、作業系統及機械手技術等;AUV的關鍵技術有總體及系統集成技術、能源及動力推進技術、自主控制與智能化技術、導航定位技術、通信技術、自主探測與識別技術和布放與回收技術等。本文主要針對AUV的關鍵技術進行分析。
3.1 總體及系統集成技術
3.1.1 AUV通用平臺設計
設計和研發通用平臺對于AUV的發展和應用有著重要的意義。若對AUV進行標準化、模塊化和系列化設計,當需要搭載不同任務載荷執行不同任務時,只需在一種或較少的幾種AUV的基礎上進行修改,即可使之適應不同的環境和任務指標。
1)標準化:AUV平臺的標準化包括航行器構型、機械和電氣接口、元器件、零組件、軟件等的標準化設計。
2)模塊化:將AUV個體的功能載荷、導航控制、能源、動力推進、穩定操縱等部分進行模塊化設計,如圖10所示。
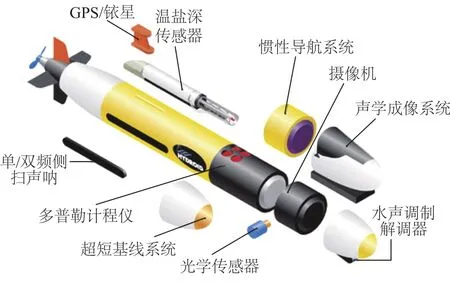
圖10 REMUS 100模塊化示意圖[9] Fig.10 Modularization of REMUS 100[9]
3)系列化:美國海軍將AUV劃分為4個等級——單兵便攜式(Man-Portable)、輕型(Light Weight Vehicle,LWV)、重型(Heavy Weight Vehicle,HWV)和超大型。其各自總體參數和性能指標如表1所示。
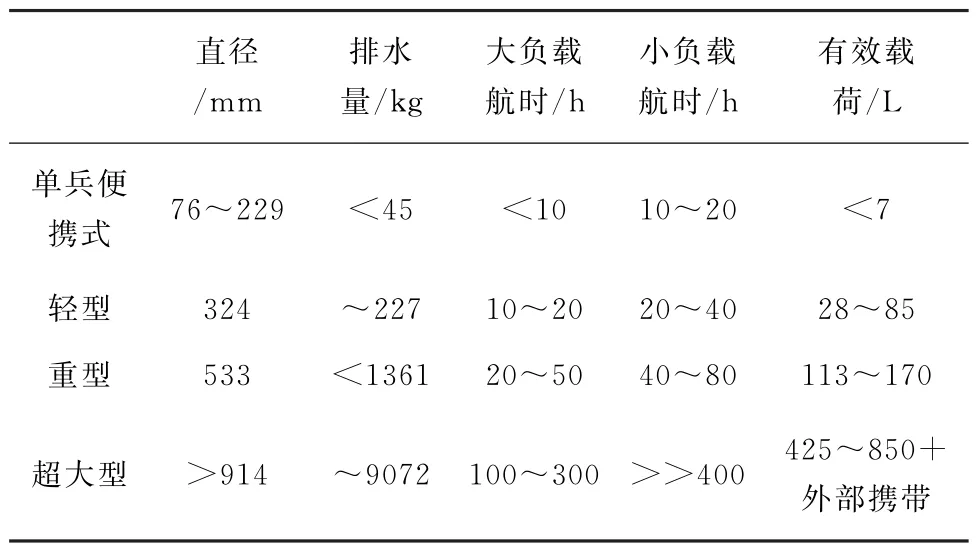
表1 美軍系列AUV參數_Tab.1 Parameters of the AUV series of the U.S.Army
國內系列AUV的參數如表2所示。
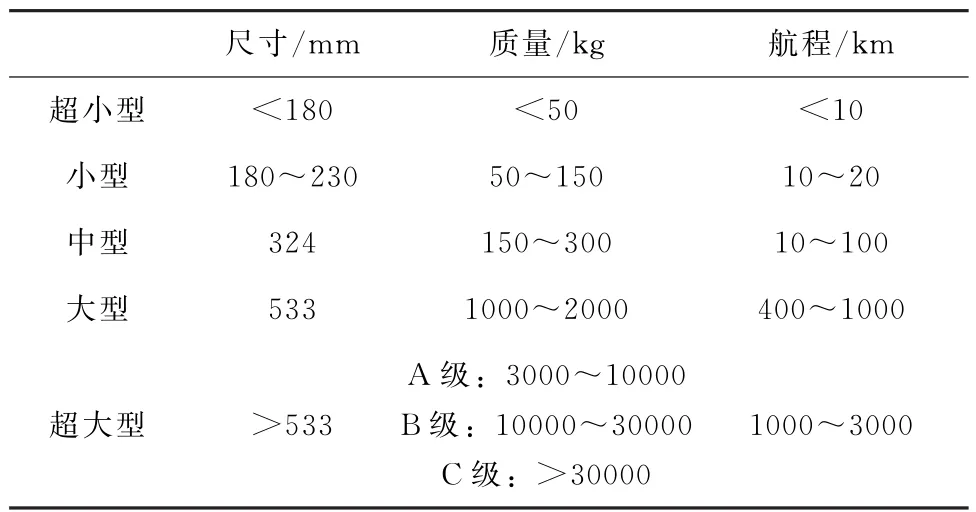
表2 國內系列AUV參數Tab.2 Parameters of the AUV series of China
3.1.2 構型與材料
1)構型:當前階段AUV主要以回轉型和扁平型為主,新發展的有仿生型、組合 (捆綁)型等,如圖11所示。
2)材料:目前,AUV頭部常采用復合橡膠材料,殼體常用鋁合金材料,內部結構件大都采用非金屬復合材料。近年來興起的復合材料具有高比強、高比模、耐高溫、韌性好、抗腐蝕與耐磨損等特性,且密度較小,可以通過降低水下航行體的質量相對地降低航行能耗,有利于增加航程,已廣泛應用于AUV(魚雷、誘餌、偵察器、靶雷、反魚雷)等各種軍民用產品上。其中硼/鋁復合材料具有高強度、低密度的特性,性能優于常用的鋁合金,是一種較為理想的AUV殼體材料。
3.1.3 減阻技術

圖11 不同構型的UUV[10-13]Fig.11 The UUVs with different configuration[10-13]
物體在水中運動的阻力比在空氣中大800倍,尤其對于細長回轉型UUV,摩擦阻力占總阻力的80%以上。因此減小阻力,特別是摩擦阻力,可以節約能源,增大航程,提高航速。減阻技術按邊界層與流體接觸表面的彈性大小,可分為剛性表面減阻技術和柔性表面減阻技術。剛性表面減阻技術常使用與流體接觸的表面為剛性的表面減阻材料,或直接在剛性表面處添加有利于減阻的其他介質,如目前研究比較廣泛的脊狀表面減阻技術、聚合物添加法、低表面能涂料、微氣泡法和隨形波表面法等;柔性表面減阻技術采用的減阻材料與流體接觸的表面為柔性,具有小的彈性模量和較大的變形能力。柔性表面減阻技術作為一種近似的仿生研究模型,具有減阻效果明顯、不需要反饋原件和響應元件,且不需要額外能量供給等優點;同時柔性表面對邊界層的湍流噪聲有削弱作用,有利于UUV提高隱身能力。
其中,脊狀表面減阻技術從仿生學角度出發,通過對各種魚類表面脊狀結構分布規律的研究(圖12),提出不同形狀、尺寸脊狀結構在水下航行器上聯合使用的減阻新方法,可有效減阻10% ~20%,如圖13所示。
此外,UUV的可靠性、安全性、保障性、維護性、經濟性、隱身性和總體設計與評估技術等都是總體技術領域值得研究的問題。
3.2 能源及動力推進技術
未來AUV大深度、遠航程、長航時的設計指標對AUV的能源與動力推進系統提出了更高的要求:能源系統比能更高、推進系統效率更高,使用更為安全和靈活。目前AUV使用的能源與動力推進系統主要有4個類型:電化學能源動力系統、AIP(Air Independent Power)熱動力系統、混合動力推進系統和新型動力推進系統。
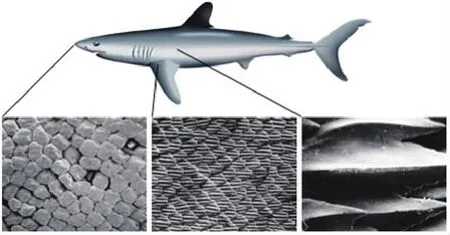
圖12 鯊魚表面脊狀結構分布Fig.12 The riblet structure on the shark skin
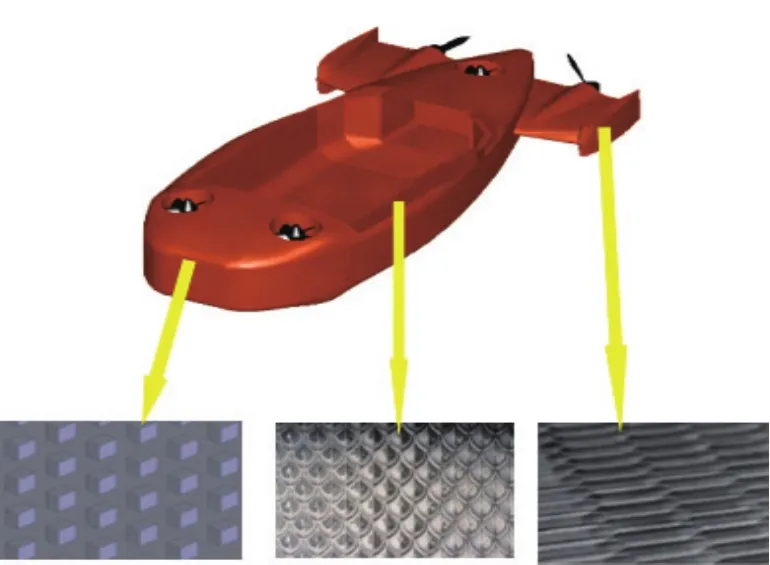
圖13 水下航行器脊狀表面減阻構想Fig.13 The proposed riblet structure on the surface of UUV for drag reduction
3.2.1 電化學能源動力系統
電化學能源動力系統由電池提供能量,驅動電機帶動推進器提供推力。由于電動推進在能量密度方面有明顯優勢,目前的水下航行器主要采用電動推進。常用的電池有:
1)一次電池,主要有錳干電池系列、堿性電池系列、汞系列、空氣電池、氧化銀電池、海水電池、鋰電池和熱電池等;
2)二次電池,主要有鉛酸電池、鎳鎘、鎳氫電池、銀鋅電池、鋰離子電池、聚合物電池等;
3)燃料電池按電解質劃分有5個主要種類:堿性燃料電池、磷酸鹽型燃料電池、熔融碳酸鹽型燃料電池、固體氧化物型燃料電池、質子交換膜燃料電池。燃料電池的電能轉化率最高,為45%~60%。
鋁氧化銀電池是當今裝備魚雷的最先進動力電池之一,法國SAFT公司研制的鋁氧化銀電池先后應用于MU90、Blackshark和F21魚雷,其性能可以達到普通鋅銀電池的2倍,比能量可達160Wh/kg。能量密度大、自放電率低、溫度特性好、可靠性安全性高、壽命長的電池是滿足AUV日益提高的性能需求的重要技術途徑。
3.2.2 AIP熱動力系統
傳統的AIP熱動力系統包括閉式循環柴油機系統、斯特林發動機系統和閉式循環汽輪機系統,這3種系統發展較為成熟,已成功應用于常規AIP潛艇。從UUV角度來講,仍需對其進行小型化、低成本化研究。
3.2.3 混合動力推進系統
混合動力推進系統結合電動力系統和熱動力系統,充分發揮其各自的優勢:低速巡航時使用電動力,巡航速度為4~5節,航程可達上千km;高速攻擊時電動力段分離,使用熱動力,攻擊速度為50節以上,航程為40km~50km。
3.2.4 新型動力推進系統
近年來,幾種新型動力推進系統引起了人們的關注。
1)太陽能動力系統,續航時間長,無產物排放,環保、安全,但受環境影響較大。圖14為采用太陽能動力系統的SAUV II。
圖14 采用太陽能動力系統的SAUV II[14]Fig.14 The SAUV II utilizing solar energy[14]
2)水下仿生學特種推進技術包括撲翼推進方式、擺尾鰭推進方式、波浪推進方式等,噪聲低,推進效率高。
3)水下超導電磁流體推進技術是一種基于電磁流體力學原理的新型水下推進技術。采用該技術的推進系統無運動部件,不產生推進噪聲,所以是一種理想的水下低噪推進方式,發展潛力巨大。
4)水沖壓發動機推進技術是熱動力AUV發展的方向之一,它直接將液態水引入燃燒室中,通過燃燒劑中的金屬粉末和水的劇烈反應產生高溫高壓燃氣,以燃氣通過噴管噴出時產生的反作用力作為動力。
5)水下滑翔技術也是當前熱門的研究方向之一,它通過液壓或溫差的驅動來改變重心,促使UUV在垂直面內運動,進而通過滑翔翼產生水平方向的動力,進行水平運動。美國華盛頓大學研制的SeaGlider利用液壓源改變重浮力來提供動力,續航時間為180d,航程可達數千km,最大下潛深度為1000m,其滑翔路徑如圖15所示。美國韋伯研究公司(Webb Research Corp.)研制的Slocum Thermal Glider利用海水溫差改變重浮力,進而由滑翔翼提供動力。
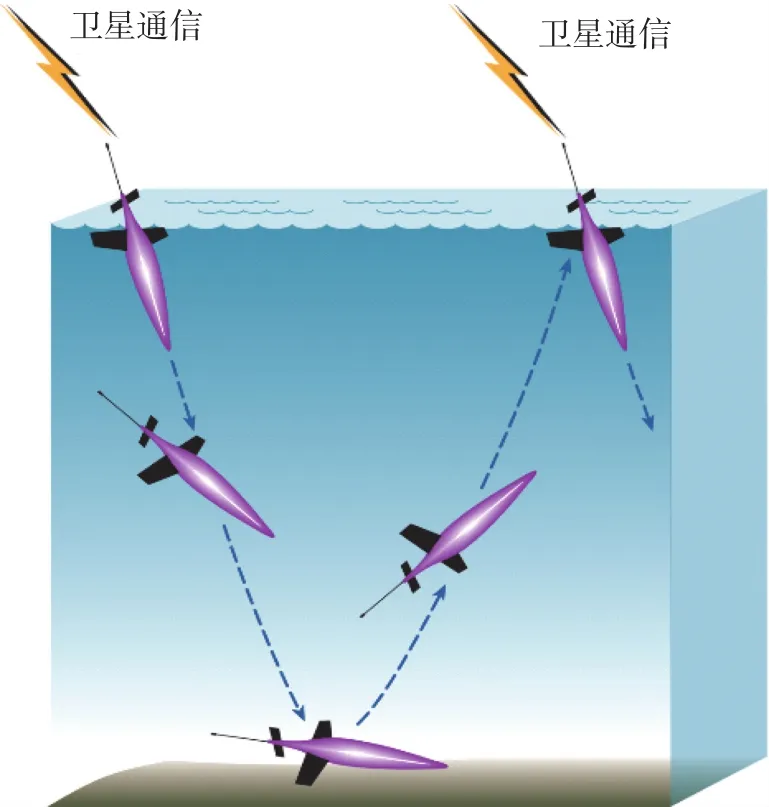
圖15 SeaGlider水下滑翔路徑[15]Fig.15 The underwater path of SeaGlider[15]
3.3 自主控制與智能化技術
自主智能控制技術作為實現AUV自主性和智能化的核心技術,對AUV執行任務的能力起著決定性作用,其實現將大大提高AUV對復雜環境中的適應能力和全球海域工作能力。Zhang等[16]指出,AUV作為智能無人系統的重要領域之一,其自主性和智能化有望在不久的將來有巨大提升。2017年,“長航程、智能化自治式潛水器的研制”被國家重點研發計劃深海關鍵技術與裝備重點專項列為子課題。為實現AUV的智能化,應主要研究海洋環境自適應控制,智能自主規劃與決策,智能信息融合,智能容錯控制和智能分布式協作控制。
3.3.1 海洋環境自適應控制
對AUV來說,溫度、鹽度、深度和海流等是重要的海洋環境參數,它們在不同地區對應值存在一定差異。要實現AUV的高效全海域工作,使其在變化的參數中更快地適應新的海洋環境,更準確地調節控制策略,保證其穩定、可靠運行, AUV對海洋環境的自適應能力至關重要。尤其對于執行深海空間復雜環境作業的AUV,在下潛過程中鹽度和溫度的變化帶來AUV浮力的改變,對AUV的航行狀態有復雜的影響。在運行條件不斷變化的過程中,控制AUV的航行姿態和航向,保證AUV在指定深度的定深航行,實現AUV對任務目標的跟蹤和操作,需要更加智能化的海洋環境自適應控制。由于海洋數據過于龐大,人類尚無法完全掌握,因此AUV的海洋環境自適應問題亟待解決。
3.3.2 智能自主規劃與決策
AUV的自主規劃包括自主任務規劃和自主路徑規劃。自主任務規劃是根據預先設定的任務指令,根據已知的海洋環境和自身條件等信息,對任務進行理解并按一定順序分解完成,從而滿足任務要求。自主路徑規劃即AUV根據所處的環境,尋求一條路徑連接起始點到終止點且能自主決策避開環境中障礙物的運動軌跡的過程,根據處理方式可分為在線規劃和離線規劃,又可根據環境信息的完整程度分為全局路徑規劃、局部路徑規劃和最基本的避障。在AUV自主規劃的過程中,除AUV自身的眾多約束和目標的約束外,還要考慮非線性非定常的復雜環境,尤其是隨機因素(隨機出現的動態障礙物等)對AUV任務和路徑規劃所帶來的影響。為更好地應對環境對AUV自主規劃帶來的負面影響,國內外研究人員做了大量研究,Zhu等[17]提出了一種基于SOM神經網絡的AUV動態任務和路徑規劃方法,可以在洋流干擾下實現路徑點跟蹤和自主任務規劃。Mc Mahon等[18]提出了一種無碰低功耗自主路徑和任務規劃算法,能有效抑制復雜水下環境對AUV工作狀態的干擾,并通過在海軍研究實驗室(Naval Research Laboratory)切薩皮克灣的實驗驗證了該算法在某種復雜任務條件下的有效性。如何使UUV在復雜環境下做出更加智能化的規劃和決策,在滿足約束條件的情況下通過增加可接受的計算量提高任務效率,實現多任務和復雜任務的智能規劃,是未來相關學者的研究重點。
3.3.3 智能信息融合
傳感器作為獲取信息的窗口,對AUV的自主性和智能化起到關鍵作用。根據多傳感器信息進行計算、分析和判斷的過程即數據融合。只有通過對傳感器數據的融合,控制系統才能對AUV進行合理的決策,采取適當的控制策略和行為, AUV的自主性和智能化才能得以實現。然而由于體積限制,AUV能攜帶的傳感器數目十分有限。如何通過有限的傳感器類型和精度獲取并挖掘更多AUV所需的信息是AUV智能信息融合的發展方向,如通過單目相機結合深度學習技術代替雙目相機或深度傳感器獲得距離信息[19]。相信在不久的未來,更多的智能信息融合技術會涌現出來。
3.3.4 智能容錯控制
AUV在水下自主執行任務時,由于復雜的水下環境,部分機構或子系統出現故障的情況時有發生。容錯控制的目的是在發生此類故障時保證AUV順利完成任務或自行返回。因此,容錯控制是保障AUV生存及成功完成任務的關鍵技術,也是實現AUV全球海域工作的重要保障。容錯控制初期采用硬件冗余技術,當其中一個或幾個失效時,可切換使用與之并聯的備用系統完成后續任務。然而,這種措施在提高可靠性的同時,增加了系統的成本,加大了能源消耗。通過一定的容錯控制算法對故障進行定位和診斷,進而調整控制策略是一種理想的方法。現有容錯控制算法尚停留在處理簡單故障的層面,更加智能、快速、準確地智能容錯控制方法將在未來AUV領域起到重要作用。
3.3.5 智能協作控制
多AUV智能協作系統作為一種高度智能化的AUV工作形式,具有低成本、高效率、強容錯性等特點,工作形式靈活,可執行單AUV無法完成的復雜任務,可縮短工作時間,擴大工作范圍,是AUV高自主性和智能化的表現形式之一[19]。多AUV智能協作系統自20世紀80年代被提出以來,受到了各國AUV研究機構和學者的高度關注,并相繼開展了相關技術研究。2006年,歐盟組織德國、意大利等國開展了GREX項目 (圖16),旨在研究解決協同導航、編隊控制、通信等問題的方案。該項目主要進行了2次海上試驗,于2009年結題,成果豐碩。美國麻省理工學院的AUV實驗室于2006年公開了其CADRE項目(圖17),通過Bluefin系列AUV研究了多AUV的協作探測與偵查的可行途徑。

圖16 歐盟GREX項目Fig.16 “GREX”project by the EU
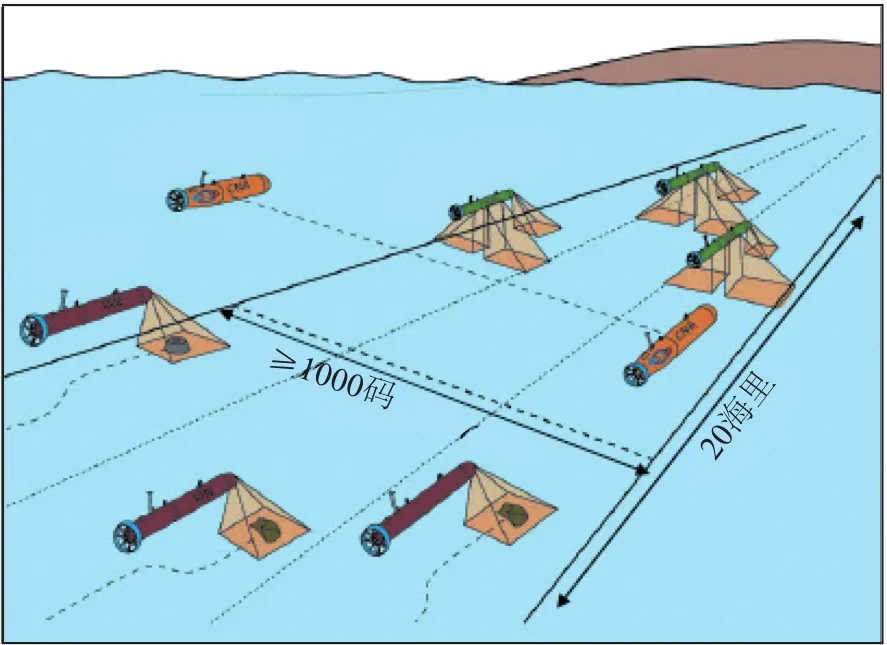
圖17 MIT CADRE項目Fig.17 “CADRE”project by MIT
編隊控制是多AUV智能協作控制的研究重點之一。合理的AUV編隊可以更好地利用各AUV的信息資源,保證多AUV之間高效協作。Cui等[20]提出了一種多欠驅動AUV的主從式編隊控制方法,從AUV只需根據主AUV的位置信息和預先設定好的隊形即可完成對參考軌跡的跟蹤。分布式多AUV協同控制可降低能源消耗,使各AUV通過自身獲得的有限信息進行動作,相互協作達到全局目標,是多AUV智能協作系統的研究熱點。
隨著無人系統和人工智能技術的蓬勃發展, AUV的能力將進一步提高,在海洋資源開發、海洋生態保護和海洋安全領域發揮更加重要的作用。
3.4 導航定位技術
AUV向長航時、遠航程、大深度、全海域發展的趨勢對導航定位系統的精度提出了更高的要求。水下導航與空中導航相比,具有工作時間長、環境復雜、信息源少、隱蔽性要求高等特點,技術難度更大,是影響AUV發展的瓶頸技術之一。
3.4.1 航位推算與慣性導航技術
航位推算技術與慣性導航技術作為最常用的兩種完全自主導航方法有共同的缺點:導航誤差隨時間累積,一般中等導航精度為1n mile/h。航位推算與慣性導航的關鍵技術有載體運動狀態下的初始對準技術、新型慣性器件和慣性器件誤差校正技術。
(1)載體運動狀態下的初始對準技術
初始對準技術為自主導航計算提供必需的初始條件,對自主導航的效果有重要的作用。一般來說,對初始對準的要求是提高對準精度,縮短對準時間。受限于工作環境,AUV需要在運動狀態下進行初始定位。如何提高載體運動狀態下的初始對準效率,降低運動狀態對初始對準帶來的負面影響是重要的研究方向。
(2)新型慣性器件
慣性器件主要包括陀螺儀和加速度計。陀螺儀是實現航位推算與慣性導航的關鍵器件。新型高精度陀螺有激光陀螺、光纖陀螺、MEMS陀螺、原子干涉陀螺等。其中MEMS陀螺有精度高、成本低、小型化、數字化和高可靠性的特點,得到了廣泛的應用。新型加速度計有石英加速度計、MEMS加速度計等。
(3)慣性器件誤差校正技術
慣性器件的主要誤差來源是漂移現象。針對漂移誤差,可采取反補償、自重調和自校正的方法進行校正,或使用GPS、DVL、聲相關計程儀、地磁計程儀等外部設備進行校正。
3.4.2 聲學導航
聲學導航有3種方式:
1)超短基線(Ultra Short Baseline,USBL)導航,基線長度<1m,通過相位測量來進行位置解算;
2)短基線(Short Baseline,SBL)導航,基線長度為1m~50m,通過時間測量得到距離,從而解算目標位置;
3)長基線(Long Baseline,LBL)導航,基線長度為100m~6000m,通過時間測量得到距離,從而解算目標位置。
其中LBL導航是最為常用的導航方式,AUV獲得與應答器間距離后,通過球面交會法、最小二乘估計法等定位算法解算自身位置。為了利用高精度的GPS信息,提高LBL導航精度,可采用LBL聲納浮標導航系統,將GPS收發機與水聲信標集成為一體,定時向AUV報告浮標的位置, AUV根據聲傳播時間及浮標位置計算出自身的位置坐標。然而上述方式都需事先在海域布放換能器或換能器陣,限制了AUV的導航范圍。
3.4.3 水下地理信息輔助導航
水下地理信息導航通過匹配算法,將測量的地理信息與先驗信息進行匹配,估計AUV的位置。理論上可實現全球自主導航,主要作為慣導的輔助手段使用。常用的水下地理信息導航的手段有地磁輔助導航、重力輔助導航、等深線導航和地形匹配導航。SLAM(Simultaneous Localization and Mapping)方法是一種同時定位與制圖方法,不需要先驗的水下地理信息圖,當AUV在水下運動時,利用相關傳感器 (地磁儀、重力計、聲傳感器)感知、提取地理信息,進行自身定位、構建、更新地理信息圖,實現水下全球自主導航。劉明等[21]分析了基于圖像聲吶的SLAM算法在AUV組合導航中的應用,劉明雍等[22]提出了一種基于隨機信標的水下SLAM導航方法,并通過仿真實驗驗證了其有效性。此外,通過分析和模擬生物 (如海龜、海豚等)對水下地理信息的利用機理和方式,還可探索新的仿生導航模式。
3.4.4 組合導航
組合導航是一種 “取長補短”的導航方法,能夠降低難度與成本,同時提高可靠性和容錯性。常見的組合導航方式有:
(1)捷聯慣導+衛星導航
該導航方式要求AUV周期性浮出水面,使用GPS/北斗衛星導航系統進行位置修正,可用于遠航程精確導航定位,但需周期性浮出水面,降低了隱蔽性,且不斷地上浮與下沉將消耗更多的能源。
(2)捷聯慣導+多普勒計程儀
該導航方式通過計程儀測得AUV絕對速度,對捷聯慣導數據進行修正,消除漂移誤差和海流影響,隱蔽性好,能耗低,但多普勒計程儀無法全水深使用,變深控制可部分解決這一問題。
(3)捷聯慣導+計程儀+地理信息
該導航方式能針對AUV的特定導航要求進行工作,有較高導航定位精度,但無法全海域使用。
(4)捷聯慣導+計程儀+衛星導航
該導航方式中,后兩者可互補使用,當計程儀無法獲得絕對速度時,使用衛星導航來校正導航誤差,以滿足全海域導航需求,提高導航精度。該組合導航方式可用于遠航程精確導航定位,但隱蔽性差,且上浮下沉消耗額外能源。
3.4.5 網絡狀態下的協同導航定位技術
在組網狀態下,多AUV攜帶不同類型導航傳感器,通過信息共享,利用時間同步信號和水聲傳播延遲進行位置解算估計,實現協同導航定位。
1)協同導航定位技術(圖18),通過水聲通信共享位置信息、相對位置和方位信息;通過協同導航算法解算得到自身的精確位置估計。協同導航定位技術可分為主從式和并行式。主從式協同導航方式中,主AUV攜帶高精度傳感器,從AUV攜帶低精度傳感器;并行式協同導航方式中,各AUV攜帶同等級傳感器,通過一定的算法設計獲得較高精度的導航定位結果。
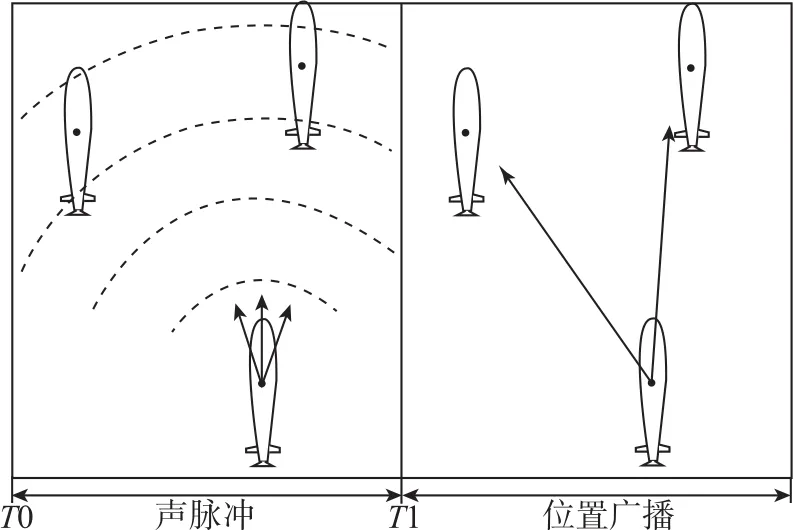
圖18 一種協同導航算法原理圖Fig.18 Diagram of a kind of cooperative navigaiton
2)移動長基線協同導航定位方法[23]是隨著AUV的水聲定位需求發展起來的一種長基線水聲導航定位系統,它與傳統長基線水聲導航定位系統最大的不同是:應答器不是固定布設在海底,而是移動的,多布設在大型AUV上,與被定位AUV組成水聲通信網絡進行協同定位,如圖19所示。
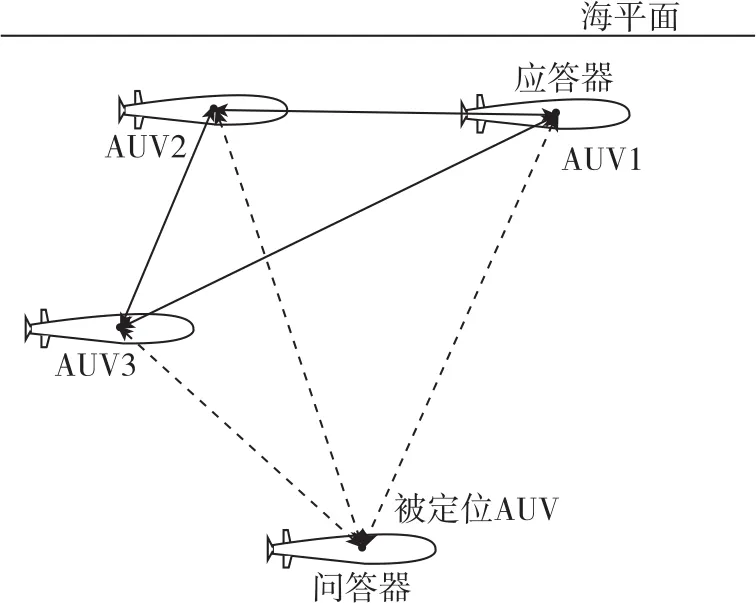
圖19 移動長基線定位原理示意圖Fig.19 Diagram of moving LBL
3.5 布放與回收技術
現代化的AUV布放和回收要求高效率、高安全性、高自動化水平,操作簡單且具備高海況作業的能力。常規AUV布放和回收方式可分為水面方式和水下方式。在水面上,可采用掛鉤布放/回收、滑道布放/回收和中繼布放/回收;在水下可根據AUV外形使用潛艇魚雷管布放/回收或潛艇外殼背負方式。其主要研究內容有:
(1)近距離精確導引對準技術
常用的近距離精確導引方法有基于慣導+ DVL的導引方法和水聲導引法。其中,水聲導引法通過超短基線獲取AUV與目標點的相對空間距離,采用橫向跟蹤控制算法導引AUV沿回塢站中軸線駛入回塢站中。由于聲學導引精確度較低,聲信號更新頻率慢,近距離視覺傳感器導引AUV回塢技術在近幾年獲得了較多關注。Watt等[24]闡述了將AUV與移動潛艇對接的概念,設計了一種基于視覺的導引方法,并于2015年成功將其應用到加拿大新斯科舍省的AUV回收實驗中。嚴衛生等[25]提出了一種基于偶極勢場的導引方法,該方法將回塢過程分為回塢準備階段和回塢階段。在回塢準備階段采用航路點導航方法,使AUV航行到距回塢站一定范圍內;然后利用建立的偶極勢場通過一定的控制算法導引AUV進入回塢站。
(2)布放/回收流體動力學
在AUV的布放/回收過程中,會存在海流海浪的來流、AUV與母船相對運動產生的擾流以及海底或龐大物體邊界產生的繞流。來流、擾流和繞流3方面相互影響、相互作用,產生非線性非定常的復雜流場,對AUV的布放和回收產生負面影響,甚至可能導致碰撞。為實現AUV的高效布放/回收,對該復雜流場的建模分析方法及AUV對該流場擾動的處理方法還需深入研究。
(3)布放/回收協調控制技術
協調控制中的核心技術為AUV和回塢站的對接控制,研究重點為回塢過程中的路徑規劃和相應的控制算法。常用的布放/回收協調控制技術有模糊控制、基于混雜系統的控制和分層遞階控制等。為提高布放/回收協調控制算法對環境的適應性和魯棒性,魯棒模糊控制、自適應滑模控制等新型控制算法得到了廣泛的關注。
4 總結與展望
UUV作為海洋開發利用和海洋安全保障的重要技術手段,在海洋開發和利用中有不可或缺的作用(表3)。本文系統總結了國外UUV的發展歷史和研究現狀,詳細分析了AUV各關鍵技術的研究現狀并指出發展趨勢。隨著相關技術的日益成熟和相關需求的不斷擴展,UUV的應用前景十分廣闊。面對接踵而來的新任務及提出的更高要求,UUV的主要研究應集中在以下4個方面:
1)提高持續工作能力,實現長航時、遠航程工作;
2)提高UUV的自主性和智能化水平,滿足多元應用領域對UUV提出的具備多種功能、執行多種任務的要求;
3)提高UUV對復雜環境的適應能力和全球海域工作能力,提高在大深度和兩極海域的工作效率;
4)提高多UUV協作系統的性能,從而提升UUV應對復雜任務的能力。
人工智能技術正在世界范圍內飛速發展,中國也將迎來人工智能2.0時代。作為人工智能的重要應用領域,無人系統的智能化水平必將在不久的將來達到新的高度,UUV也將在海洋資源開發、海洋生態保護和海洋安全領域發揮更加重要的作用。
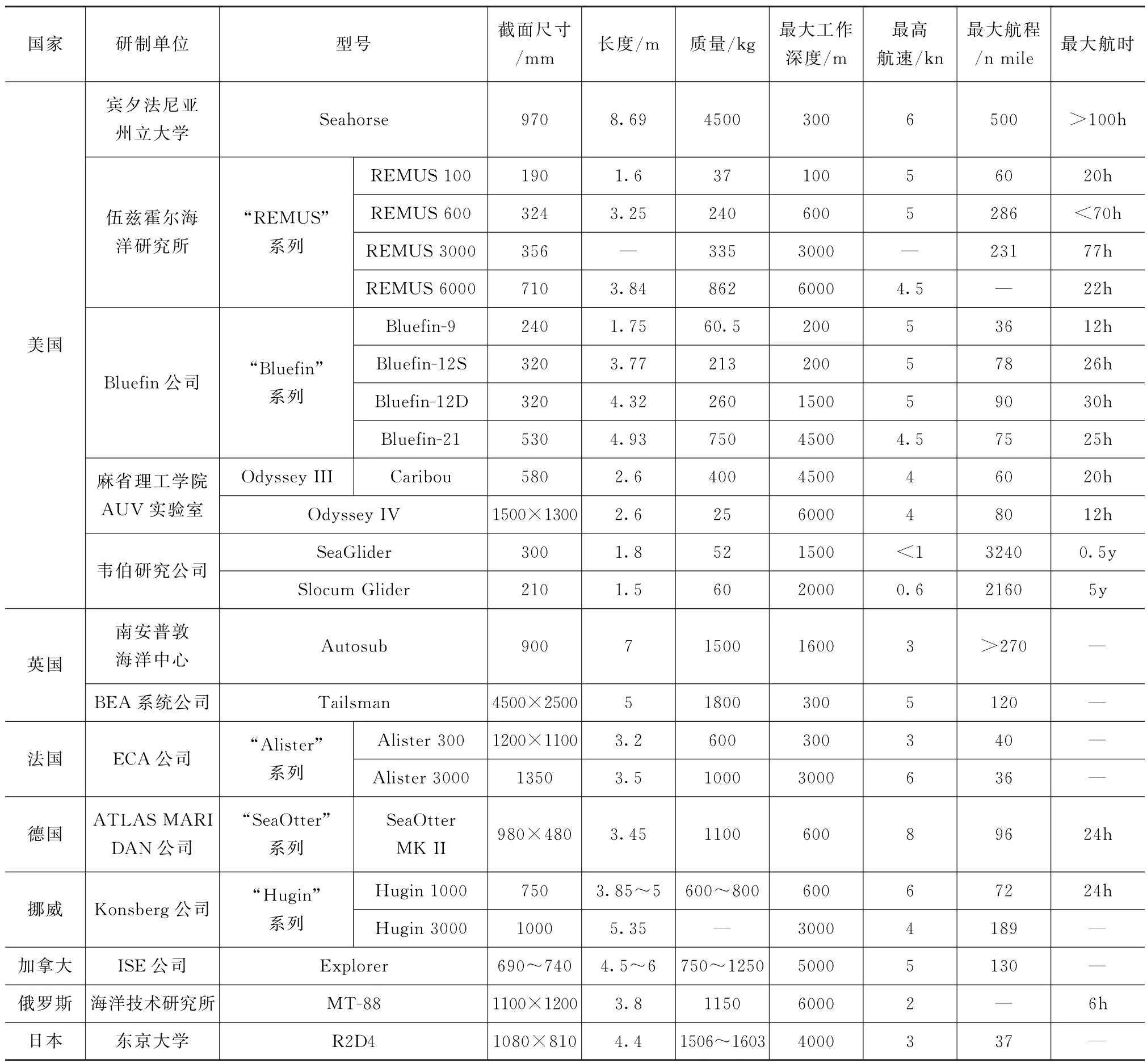
表3 國外典型UUV參數Tab.3 Parameters of typical foreign UUV
[1] Remotely Operated Vehicle“KAIKO7000II”[DB/OL]. http://www.jamstec.go.jp/e/museum/wallpaper/ wp/kaiko7000_2_1024.jpg.
[2] Oceaneering公司[DB/OL].http://www.oceaneering. com/.
[3] ROV Underwater Remotely Operated Vehicles by Saab Seaeye[DB/OL].http://www.seaeye.com/.
[4] Seamor Marine Ltd.|World Class Subsea Remotely Operated Vehicles[DB/OL].http://seamor.com/.
[5] AUV Laboratory at MIT Sea Grant[DB/OL].https:// auvlab.mit.edu/vehicles/#o4.
[6] 陳強.水下無人航行器[M].北京:國防工業出版社,2014.
[7] 日本機器人在印度洋海底發現世界最大熔巖平原[DB/OL].http://news.xinhuanet.com/tech/2007-01/11/content_5593520.htm.
[8] Bluefin-21》Bluefin Robotics[DB/OL].http:// www.bluefinrobotics.com/vehicles-batteries-andservices/bluefin-21/.
[9] Autonomous Underwater Vehicle,REMUS 100-REMUS 100 AUV-Kongsberg Maritime[DB/OL].https://www. km.kongsberg.com/ks/web/nokbg0240.nsf/AllWeb/D24 1A2C835DF40B0C12574AB003EA6AB?OpenDocument.
[10] Autosub6000-AUVAC[DB/OL].http://auvac.org/ configurations/view/86.
[11] Double Eagle MCM System[DB/OL].http://www.seaeye.com/pdfs/military/Double_Eagle_MCM.pdf# view=Fit H.
[12] ハイボット-極限作業におけるロボティクス·ソリューション[DB/OL].http://www.hibot.co.jp/ en/products/robots_1/acm-r5h_33.
[13] US deploys underwater drones to hunt for Iranian drones-Telegraph[DB/OL].http://www.telegraph.co.uk/ news/worldnews/middleeast/iran/9395584/US-deploys-underwater-drones-to-hunt-for-Iranian-drones. html.
[14] SAUV II-AUVAC[DB/OL].http://auvac.org/configurations/view/24.
[15] Seaglider[DB/OL].http://www.apl.washington.edu/ project/project.php?id=seaglider.
[16] Zhang T,Li Q,Zhang C,et al.Current trends in the development of intelligent unmanned autonomous systems[J].Frontiers of Information Technologyamp;E-lectronic Engineering,2017,18(1):68-85.
[17] Zhu D,Huang H,Yang S X.Dynamic task assignment and path planning of multi-AUV system based on an improved self-organizing map and velocity synthesis method in three-dimensional underwater workspace[J].IEEE Transactions on Cybernetics,2013, 43(2):504-514.
[18] Mc Mahon J,Plaku E.Mission and motion planning for autonomous underwater vehicles operating in spatially and temporally complex environments[J]. IEEE Journal of Oceanic Engineering,2016,41(4): 893-912.
[19] Cao Y,Shen C,Shen H T.Exploiting depth from single monocular images for object detection and semantic segmentation[J].IEEE Transactions on Image Processing,2017,26(2):836-846.
[20] Cui R,Ge S S,How B V E,et al.Leader-follower formation control of underactuated autonomous underwater vehicles[J].Ocean Engineering,2010,37 (17):1491-1502.
[21] 劉明,張嚴,徐德民.基于圖像聲納SLAM算法在AUV組合導航中的應用[J].魚雷技術,2011,19 (4):276-281.
[22] 劉明雍,董婷婷,張立川.基于隨機信標的水下SLAM導航方法[J].系統工程與電子技術,2015, 37(12):2830-2834.
[23] 張立川,徐德民,劉明雍,等.基于移動長基線的多AUV協同導航[J].機器人,2009,31(6):581-585.
[24] Watt G D,Roy A R,Currie J,et al.A concept for docking a UUV with a slowly moving submarine under waves[J].IEEE Journal of Oceanic Engineering, 2016,41(2):471-498.
[25] 嚴衛生,齊貝貝,高劍,等.基于偶極勢場的自主水下航行器回塢導引算法[J].系統工程與電子技術, 2016,38(4):902-908.
Development and Key Technologies of Unmanned Underwater Vehicles
WANG Tong-hao1,PENG Xing-guang1,PAN Guang1,XU De-min1,2
(1.School of Marine Science and Technology,Northwestern Polytechnical University,Xi’an 710072,China; 2.Research Center for Unmanned System Strategy Development,Northwestern Polytechnical University,Xi’an 710072,China)
The Unmanned Underwater Vehicle(UUV),including the Remotely Operated Vehicle (ROV)and the Autonomous Underwater Vehicle(AUV),is indispensable in the field of marine science,underwater targets detection,etc.,for safeguarding marine rights and interests.Thus, the UUV has drawn world-wide attention and plenty of efforts have been made to improve related technologies.This work reviews the development and applications of the UUV.In addition,key technologies of the AUV and their prospects are also presented.
Unmanned underwater vehicle(UUV);Remotely operated vehicle(ROV);Autonomous underwater vehicle(AUV)
O375.5 文獻標志碼:A
2096-4080(2017)04-0052-13
2017-09-15;
2017-11-01
國家自然科學基金(61473233)
王童豪(1994-),男,博士,主要研究方向為自主水下航行器控制與導航技術。E-mail:wangth@mail.nwpu.edu.cn