一種簡化SVPWM算法研究與實現*
2017-12-20 11:01:42檀永侯明國張道農
電測與儀表 2017年5期
檀永,侯明國,張道農
(1.國電南瑞科技股份有限公司智能電網保護和運行控制國家重點實驗室,南京210061;2.華北電力設計院有限公司,北京100120)
0 引 言
空間矢量脈寬調制SVPWM技術是在20世紀80年代提出的一種先進的PWM技術,它通過控制復平面的電壓空間矢量,使其磁鏈軌跡盡量逼近圓形,從而達到減少開關器件的開關次數、提高直流電壓利用率、獲得較好的諧波抑制效果的目的。與傳統的正弦矢量調制SPWM技術相比,其開關器件的開關次數可以減少1/3,直流電壓利用率可提高15%,且易于實現實時的數字化控制[1-7]。
本文在研究基于轉子磁場定向FOC的永磁同步電機控制的基礎上,通過對SVPWM算法的基本原理及實現方法的深入研究,提出了一種簡化的SVPWM算法,并在基于ARM Cortex-M4內核的高性能處理器STM32F407上,實驗驗證了該簡化算法的可行性。圖1描述了基于轉子磁場定向FOC的永磁同步電機控制的基本模型[8]。

圖1 i d=0的永磁同步電機FOC矢量控制基本架構Fig.1 Basic structure of FOCmotor control with i d=0
1 SVPWM的基本原理
一個典型的兩電平三相三線PWM逆變器拓撲結構如圖2所示。
其中,Udc是直流母線電壓,UAO、UBO、UCO是負載相電壓,線電壓的表達式如下:

圖2 兩電平三相三線PWM逆變器Fig.2 DC/AC PWM converter
若把圖2上臂中與A,B,C相連的開關管的開關狀態(Sa,Sb,Sc)作為其開關狀態量,1表示導通,0表示截止,則有(0,0,0)至(1,1,1)共8個狀態量。
每一種開關狀態輸出的合成電壓空間矢量Up分別記為U0至U7,其中U0與U7為零矢量,其他六個則為非零矢量,這八個矢量統稱為基本矢量。若開關狀態量(Sa,Sb,Sc)每600切換一次,則可將電壓矢量空間分為6個扇區,其矢量分布如圖3所示。

圖3 電壓矢量和扇區空間分布Fig.3 Voltage vector and space sector
利用這八個基本電壓矢量來線性擬合期望參考電壓矢量,是SVPWM的基本思想。因此,在一個PWM輸出周期Ts內,輸出電壓矢量Vo可由其扇區內的兩個相鄰矢量加上零矢量構成。根據伏秒平衡原理,各基本矢量的作用時間滿足式(2)[9]。

經過數學推導[10],可以求出 Tx、Ty、Tz的數學表達式如公式(3)所示。其中,M是直流電壓利用率,通常也稱為調制深度或者調制比。
在圖1所示的電機控制模型中,當經過逆Park變換,求出αβ坐標系下的電壓參考Vo=Vα+j Vβ矢量后,需要根據式(4)通過反正切函數運算求出該合成電壓矢量的相角θ,再根據θ求得扇區號S,并根據式式(3)計算基本電壓矢量的作用時間。
由上文可以看出,基本的SVPWM空間矢量算法需要使用反正切函數及求平方根等數學運算,其算法實現較為復雜、計算量大、計算精度也會受到不可忽視的影響,而且很難滿足電機控制的實時性要求。
2 簡化SVPWM算法
對式(3)使用三角函數公式展開,并結合式(5):

可以推導出式(6):
為分析方便,令:
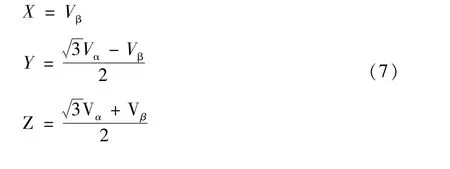
根據式(7),并結合各扇區 Vα、Vβ的數學關系,可以方便的推導出各扇區的分布情況。以第一扇區為例,當合成電壓矢量Vo位于第一扇區時,Vα、Vβ、的數學關系如式(8)。

從而可以得出:X>0,Y>0,Z<0;依次類推,可以得到表1所示的扇區分布表格。

表1 扇區分布與XYZ的關系Tab.1 Relationship between sectors and XYZ
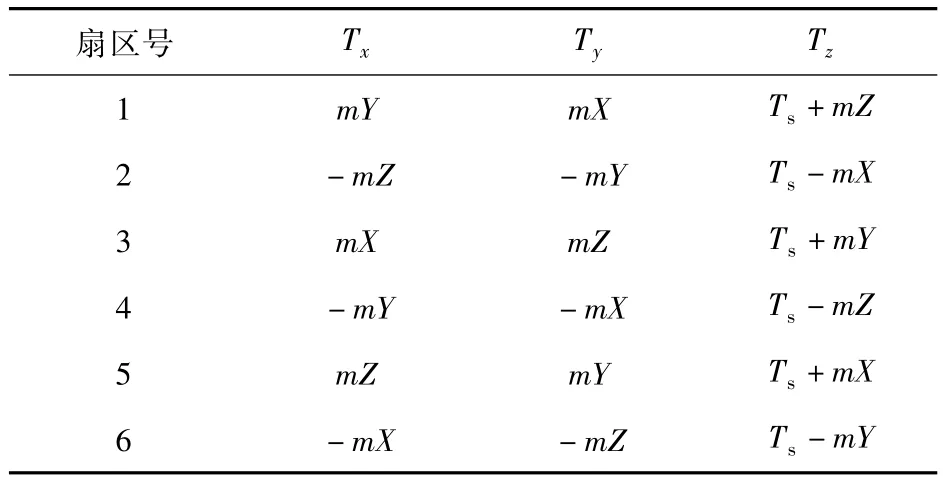
表2 各扇區的基本矢量作用時間Tab.2 Basic vector time of each sector
由以上推導可以看到,經過對X、Y、Z進行簡單的四則運算,便可以判斷出合成電壓所處的扇區,并計算出各基本矢量的作用時間,無需經過三角函數等復雜運算,大大簡化了計算的復雜程度,便于如ARM微處理器等嵌入式微處理器實現。
下面本文將探討X、Y、Z的實際物理意義。根據電機學控制理論,任一合成電壓空間矢量Vo可表示為公式(9)所示。對式(9)進行展開,可以得到Vo在αβ坐標系下的數學表達式。


從而可以得到:
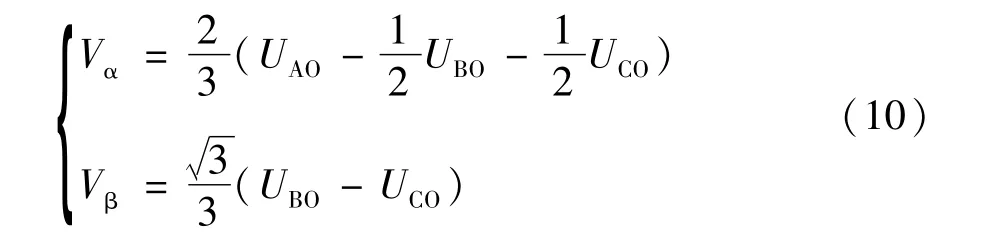
進而可以使用Vα、Vβ推導出三相線電壓的表達式:
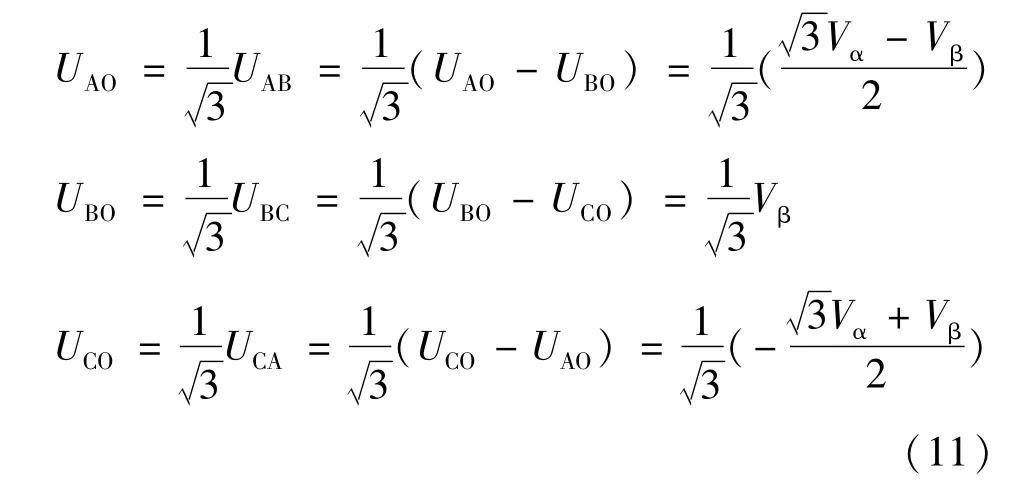
由公式(7)與公式(11)可以看到,X、Y、Z與線電壓之間的本質物理聯系,而且通過對線電壓在各扇區的物理特性,也可以推導出表1所示的扇區分布。
3 基于STM32F407的SVPWM算法實現
在SVPWM的實際應用中,七段式對稱調制算法因具有如下特點而取得了廣泛的應用:
(1)每個扇區雖有多次開關狀態切換,但每次切換只有一個開關動作,開關損耗較小;
(2)利用基本電壓矢量直接生成波形,便于軟件實現;
(3)在每個PWM波里,都以電壓矢量U0開始和結束,電壓矢量U7插在中間,且兩個零矢量作用時間相等,可以改善電流波形,電機運行平穩。
圖4描述了在各扇區下的七段式SVPWM調制輸出波形。根據表2可得到各扇區下基本電壓空間矢量的作用時間,從而計算出每個開關的切換點時間,再將計算得到的切換點時間數值存入相應的STM32F407的定時器比較寄存器CCR1、CCR2、CCR3中,即可實現SVPWM算法。
STM32F407是一款基于Cortex-M4F內核的高性能嵌入式ARM微處理器,它具有浮點運算處理單元,最高運行速度可達168 MHz,其片上外設資源豐富,性能強大,性價比高。該芯片具有17個片上定時器,其中定時器1和定時器8與其它定時器完全獨立,且具有死區發生器、剎車控制、PWM互補輸出等專用于電機控制的功能。本文將定時器1設置在PWM中央對齊模式1下,利用其3路PWM互補輸出通道實現三相SVPWM輸出。


圖4 七段式SVPWM各扇區調制輸出波形Fig.4 Modulation outputwaveform of seven-segment SVPWM in each sector
結合圖4和表2,可以推導出每個開關的切換點時間,即寫入定時器比較寄存器CCR1、CCR2、CCR3中的值如表3所示。
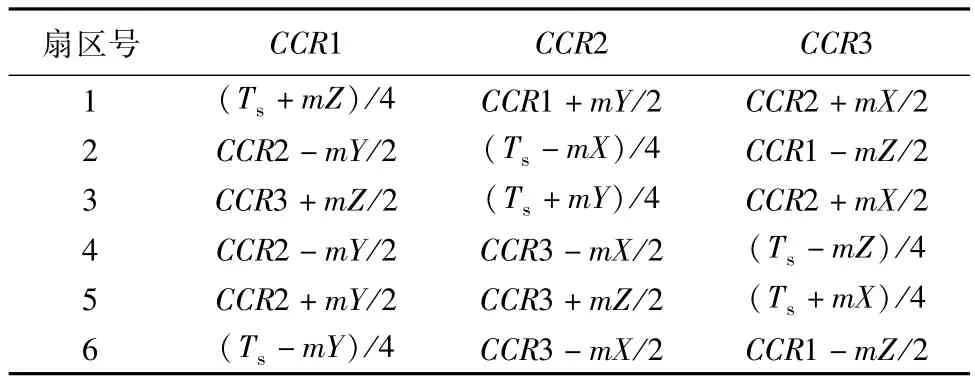
表3 各扇區的定時器值Tab.3 Register value in different sectors
4 實驗
按照圖1設計了基于STM32F407的永磁同步電機控制器,永磁同步電機為通潤驅動的VM450,其參數如下:額定轉速76轉/分;額定功率1.1 kW;額定電壓220 V;額定電流5.6 A;額定頻率20.3 Hz;額定轉矩:138 N·m;極對數32極。圖5為38轉/分時的電機電流波形,圖6為額定轉速下的電機電流波形,由于電機空載運行,因此電流較小,同時由于未加入死區補償,因此電流波形含有諧波,有一定失真。
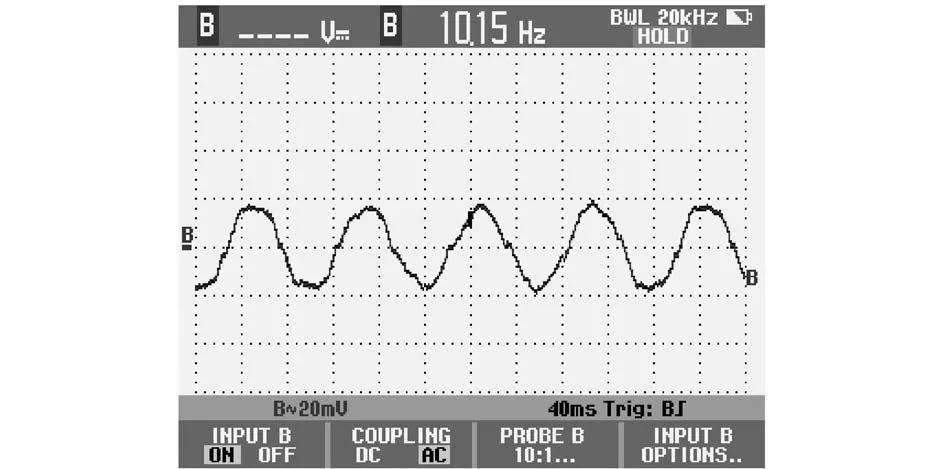
圖5 永磁同步電機電流(38轉/分)Fig.5 PMSM current(38round/min)
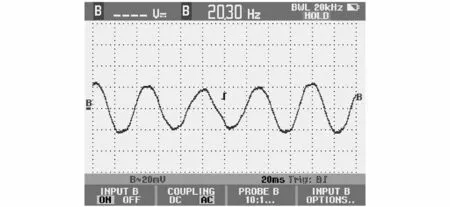
圖6 永磁同步電機電流(76轉/分)Fig.6 PMSM current(76round/min)
5 結束語
本文深入的分析了空間脈寬矢量調制SVPWM的基本原理及其簡化算法的實現,并在STM32F407上驗證了該算法的可行性,為實現FOC電機控制算法及相關SVPWM研究提供了參考。
