肘桿式伺服曲柄機構的分析研究
2017-12-28 09:11:22許振華迪茹俠
裝備制造技術 2017年10期
許振華,迪茹俠,周 琪
(1.長安大學 工程機械學院,陜西 西安710064;2.溫州市交通工程質量監督局,浙江 溫州325000)
肘桿式伺服曲柄機構的分析研究
許振華1,迪茹俠1,周 琪2
(1.長安大學 工程機械學院,陜西 西安710064;2.溫州市交通工程質量監督局,浙江 溫州325000)
為提高沖床柔性化制造及增力比效果,根據其動力性能參數及結構特點,設計一種肘桿式伺服曲柄機構并進行分析。利用matlab對機構進行優化分析,找出符合沖床性能的最佳結構尺寸參數,然后分析其運動學、動力學特征。最后,運用adams對此優化結構進行驗證分析。結果表明,經過優化分析的肘桿式伺服曲柄機構具有明顯的急回特性,并且運行過程并無結構干涉等問題的出現。因此,利用matlab與adams兩種軟件相結合,可有效分析肘桿式伺服曲柄機構,為機械結構的分析設計提供參考依據。
沖床;肘桿式;伺服電機;曲柄機構
傳統沖床柔性化制造程度低,伺服沖床又有傳動系統增力比小、功耗大等缺點。為達到機械制造的綠色節能效果,就促使人們探索一種較好的增力傳動機構。程永奇[1]等人利用UG對肘桿式機構進行動力學分析,并分析沖床滑塊運動特性及其受力情況。閆興[2]對肘桿式機構存在的誤差和滑塊運動性能進行研究,分析了滑塊自鎖現象,建立肘桿式壓力機三維模型,并進行相關仿真分析。張同同[3]利用adams、ansys軟件對各種肘桿式傳動機構進行運動學分析,發現三角肘桿式傳動機構的優點,找出肘桿式機構的薄弱點處。杜二虎[4]對上、中、下三種三角肘桿式傳動機構進行研究分析,并指出各個傳動機構優缺點。孟強偉等[5]利用matlab對肘桿式機構進行運動學和動力學分析。朱新武等[6]對肘桿式伺服壓力機進行了深入研究,并對比曲柄連桿式壓力機,從而證明肘桿式機構的優良性能。
通過對肘桿式伺服曲柄機構的研究現狀分析發現,大多數的理論研究成果局限性較大。目前,很少有針對精密型高速沖床肘桿式伺服曲柄機構的研究分析。本文采用JC23-35型數控沖床作為參考對象,主要對精密型高速沖床肘桿式伺服曲柄機構進行優化設計并進行相應的動力學、運動學分析。
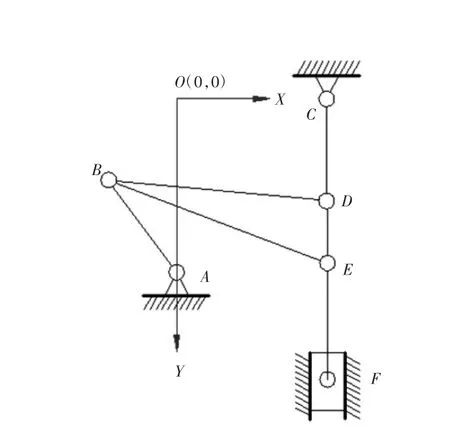
圖1 機構模型簡圖
1 優化設計
1.1 機構基本原理
肘桿式伺服曲柄機構模型簡圖如圖1所示。
如圖1 所示,模型鉸鏈點分別為 A、B、C、D、E、F點,以鉸鏈點A正上方距離為y的點O為坐標原點,則 A 點坐標為 A(0,y),記桿 AB、BD、BE、DE、CD 及EF 的名稱和距離分別為 L1、L2、L3、L4、L5、L6.以曲柄 L1的逆時針方向為正向,并以圖1所示為機構死點位置和初始位置。建立坐標系,假設垂直于OA的線段OC長為x,并假設各桿與X軸正向瞬時夾角分別為θ0、θ2、θ3、θ4、θ5、θ6,瞬時角速度分別為 ω0、ω2、ω3、ω4、ω5、ω6,記θ1為曲柄經過時間t過程的轉動角度。此時,各鉸鏈點的坐標為 A(0,y)、B(L1cosθ0,y+L1sinθ0)、C(x,0)、D(x,L5)、E(x,L4+L5)、F(x,L4+L5+L6).
1.2 優化分析
為保證增力效果及滑塊良好工作狀態,以有效扭矩為優化目標函數,使平均有效扭矩最小。在一個設計周期內,為滿足滑塊性能要求,目標函數可定義為:

其中,vi為曲柄實際速度;vˉ為平均速度;n為曲柄的控制點數。按照前述要求,構建優化扭矩子函數,設計變量為各桿長。
根據所參考JC23-35型沖床的空間尺寸要求,建立約束條件,各桿長 L1、L2、L3、L4、L5、L6取值范圍分別 為 :(40,55)、(400,500)、(500,600)、(180,250)、(130,170)、(120,150),單位是 mm.
結合四桿機構成立條件,利用matlab相關函數及算法,得到 L1、L2、L3、L4、L5以及 L6的最優解分別為:47.6 mm、431.55 mm、517.08 mm、194.29 mm、152.74 mm、133.33 mm. 此時,θ0值為 249.709°,y的值為 85.6 mm,x的值為400 mm.
2 運動學和動力學分析
依據JC23-35型沖床的總體結構尺寸以及優化分析結果,對各桿分別進行運動學分析。基于機構本身特點和幾何結構正余弦定理,建立各桿初始角度與最優解各桿長度之間的關系,從而求出各桿的初始角度值。然后,關于時間t進行求導,就可得到各桿初始位置時的瞬時角速度值。最后,再對t進行求導,就可得到初始位置時的瞬時角加速度。于是,可求得各個桿件的運動參數。
若已知各桿的質量,根據最優解結果,定義各桿慣性力、慣性力矩以及各桿轉動慣量。本肘桿式伺服曲柄機構采用三角肘桿式,質心在形心位置,其余構件質心在y軸正向2/5長處。在理想狀態下,可通過各桿的受力分析和結構特點建立加速度方程和力矩方程,從而對各桿進行動力學分析。
利用matlab對滑塊在一個周期內隨曲柄運動的特性進行分析,如圖2所示。
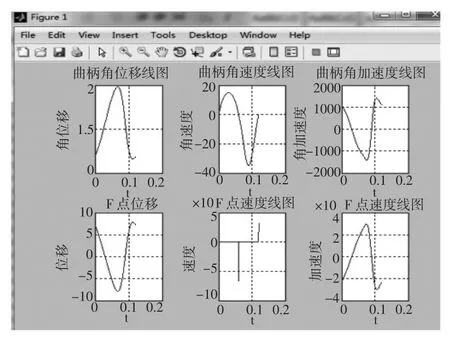
圖2 滑塊特性分析
由圖2可知,鉸鏈點F即滑塊具有明顯的急回特性,工作過程緩慢而平穩。
3 驗證分析
利用adams進行優化結果的驗證,初選曲柄速度為30 r/min,提取鉸鏈點D驗證結果如圖3所示。
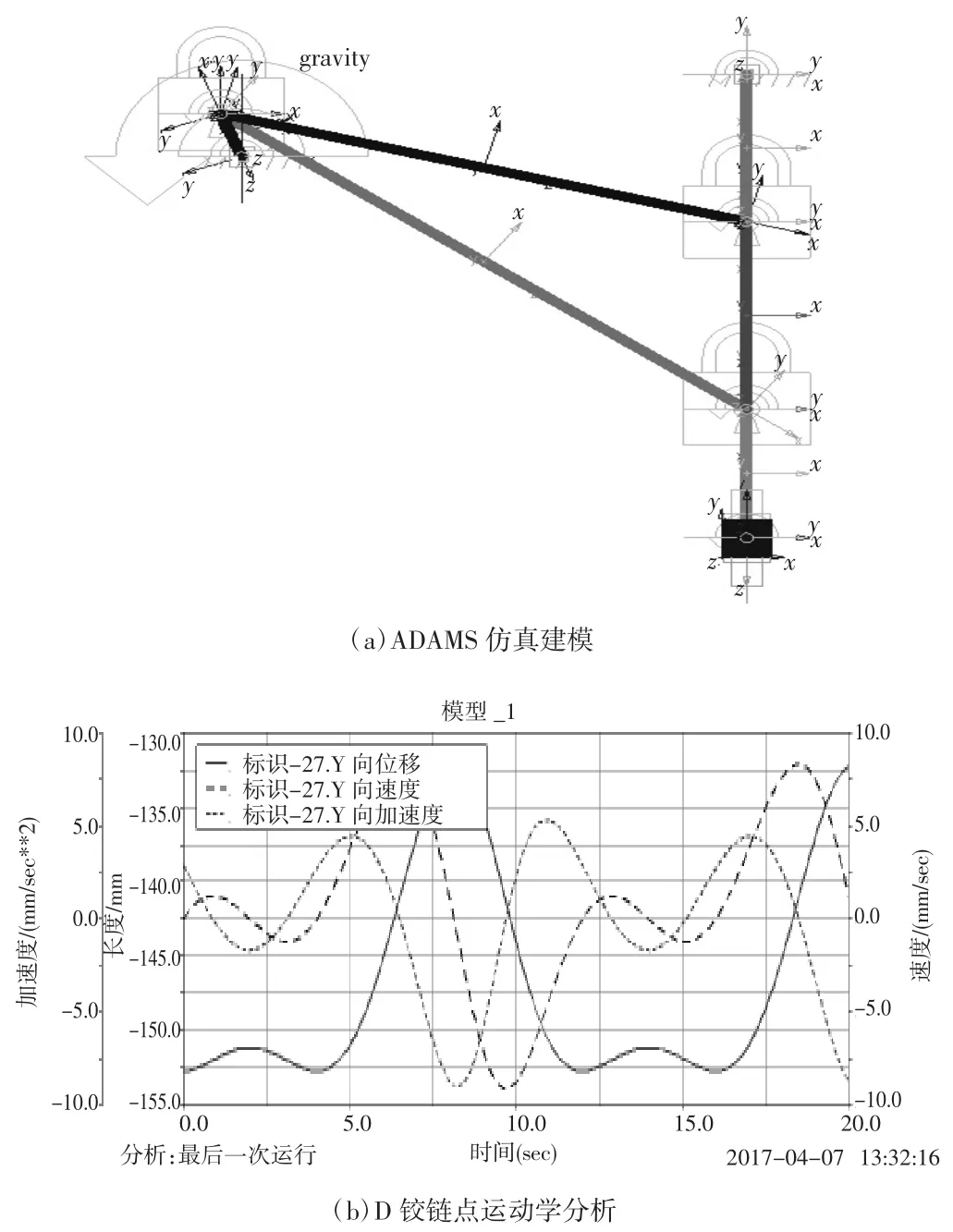
圖3 adams驗證分析
由圖3可知,機構工作過程穩定,且無機構干涉問題存在。
4 結束語
本文采用matlab和adams對肘桿式伺服曲柄機構進行分析研究。結果表明,經過優化分析得出最優解的三角肘桿式伺服曲柄機構具有良好的增力沖壓效果,沖壓過程緩慢平穩,符合實際沖床的工作要求。
[1]程永奇,張 鵬,魏良模.基于UG的肘桿式伺服壓力機動力學分析方法研究[J].機械工程師,2009(11):61-63.
[2]閆 興.1250噸廣義肘桿式冷鍛壓力機設計及仿真[D].秦皇島:燕山大學,2012.
[3]張同同.250噸數控伺服壓力機傳動機構運動特性及機架有限元分析[D].長春:吉林大學,2013.
[4]杜二虎.三角肘桿式伺服壓力機主傳動系統研究[D].武漢:華中科技大學,2012.
[5]孟強偉,葉春生,莫健華,等.基于Matlab-Simulink的肘式伺服壓力機動力學仿真[J].鍛壓裝備與制造技術,2012,282(6):27-30.
[6]朱新武,聞開斌,任東杰.肘桿式伺服壓力機的運動分析[J].鍛壓裝備與制造技術,2011(4):29-32.
Analysis of Elbow Servo Crank Mechanism
XU Zhen-hua1,DI Ru-xia1,ZHOU Qi2
(1.Chang’an University,Engineering Machinery Institute,Xi’an Shaanxi 710064,China;2.Wenzhou Traffic Engineering Quality Supervision Bureau,Wenzhou Zhejiang 325000,China)
In order to improve the flexible manufacturing and force ratio effectof punch,according to its dynamic performance parameters and structural characteristics,a elbow servo crank mechanism is designed and analyzed.Using matlab to optimize the mechanism,the best structure size parameter that accords with the performance of the punch machine is found out,and then its kinematics and dynamics characteristics are analyzed.Finally,adams is used to verify and analyze the optimized structure.The results show that after the elbow servo crank mechanism optimization analysis with quick return characteristics obviously,and there are no structural interference during operation.Therefore,the use of matlab and adamscan effectively analyze the elbow servo crank mechanism,provide the reference for the design and analysis of mechanical structure.
punch;elbow;servo motor;crank mechanism
TG315.5
A
1672-545X(2017)10-0214-03
2017-07-02
許振華(1989-),男,河南商丘人,碩士研究生,主要研究機械制造及其自動化。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
現代企業(2015年2期)2015-02-28 18:45:09
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44