基于虛擬樣機(jī)的ATV轉(zhuǎn)向系統(tǒng)優(yōu)化
2017-12-28 09:11:24趙東升劉進(jìn)偉嚴(yán)天雄朱明超
裝備制造技術(shù) 2017年10期
趙東升,劉進(jìn)偉,嚴(yán)天雄,朱明超
(隆鑫通用動(dòng)力股份有限公司,重慶400052)
基于虛擬樣機(jī)的ATV轉(zhuǎn)向系統(tǒng)優(yōu)化
趙東升,劉進(jìn)偉,嚴(yán)天雄,朱明超
(隆鑫通用動(dòng)力股份有限公司,重慶400052)
針對(duì)某公司現(xiàn)有ATV產(chǎn)品存在的問題,運(yùn)用虛擬樣機(jī)技術(shù)建立了“前懸架-轉(zhuǎn)向系統(tǒng)”動(dòng)力學(xué)模型,結(jié)合轉(zhuǎn)向系統(tǒng)設(shè)計(jì)相關(guān)理論對(duì)轉(zhuǎn)向系統(tǒng)進(jìn)行優(yōu)化并獲得優(yōu)化方案。基于現(xiàn)有試驗(yàn)條件制定了合適的試驗(yàn)方案,經(jīng)實(shí)車驗(yàn)證優(yōu)化方案效果達(dá)到預(yù)期。
虛擬樣機(jī);ATV;轉(zhuǎn)向系統(tǒng);優(yōu)化
某700cc排量ATV是某公司現(xiàn)有產(chǎn)品,專業(yè)評(píng)價(jià)人員認(rèn)為該車轉(zhuǎn)向困難。由于該車已基本設(shè)計(jì)定型,設(shè)計(jì)部門要求在盡可能少改動(dòng)零件的前提下改善該車的轉(zhuǎn)向性能,目標(biāo)是該車的轉(zhuǎn)向性能優(yōu)于現(xiàn)狀并接近競(jìng)品(同行業(yè)相近排量標(biāo)桿產(chǎn)品)的水平。
1 基礎(chǔ)理論
1.1 阿克曼轉(zhuǎn)角誤差
車輛低速轉(zhuǎn)向行駛時(shí),在可忽略輪胎側(cè)偏角的影響情況下,為使車輛轉(zhuǎn)向過程中車輪都盡可能保持純滾動(dòng),轉(zhuǎn)向內(nèi)、外輪轉(zhuǎn)角應(yīng)該滿足阿克曼轉(zhuǎn)角幾何關(guān)系[1]:
cotα -cotβ =K/L
式中:α是外輪轉(zhuǎn)角,β是內(nèi)輪轉(zhuǎn)角,K是車輪主銷中心線的延長(zhǎng)線與地面交點(diǎn)之間的距離,L是軸距。
車輛轉(zhuǎn)向時(shí)滿足阿克曼轉(zhuǎn)角幾何的程度常用阿克曼轉(zhuǎn)角誤差(Ackerman Error)Δ來表征[2]。阿克曼轉(zhuǎn)角誤差定義:外輪實(shí)際轉(zhuǎn)角與理想轉(zhuǎn)角的差值。該誤差越小,轉(zhuǎn)向系統(tǒng)滿足阿克曼轉(zhuǎn)角幾何的程度越高,一般要求在最大轉(zhuǎn)角時(shí)該誤差低于3°[3]。
根據(jù)圖1幾何關(guān)系,可以確定車輛最小轉(zhuǎn)彎半徑Rmin,Rmin表征車輛機(jī)動(dòng)性能。設(shè)ε為主銷偏移距,αmax為外輪極限轉(zhuǎn)角,則αmax與Rmin關(guān)系滿足[1]:

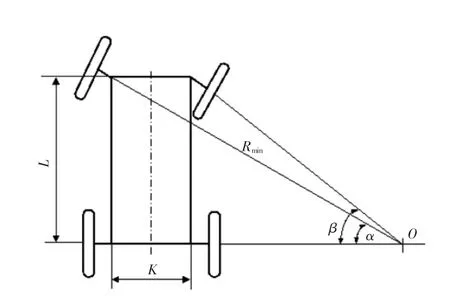
圖1 理想阿克曼轉(zhuǎn)角幾何關(guān)系
1.2 轉(zhuǎn)向系統(tǒng)基本設(shè)計(jì)原則
轉(zhuǎn)向輪定位參數(shù)設(shè)置目的是:保證轉(zhuǎn)向輕便、行駛穩(wěn)定、防止輪胎磨損。這些參數(shù)主要包括:轉(zhuǎn)向輪前束角δ,轉(zhuǎn)向輪外傾角ε,主銷后傾角τ及主銷內(nèi)傾角σ.轉(zhuǎn)向系統(tǒng)與懸架系統(tǒng)是兩套獨(dú)立的系統(tǒng),當(dāng)把這兩套系統(tǒng)作為整體分析時(shí),它們的運(yùn)動(dòng)關(guān)系相互干涉[4]。轉(zhuǎn)向系統(tǒng)的設(shè)計(jì)要盡量減小這種運(yùn)動(dòng)干涉,保證兩套系統(tǒng)的匹配,減小車輪上下跳動(dòng)時(shí)轉(zhuǎn)向輪定位參數(shù)變化的范圍,以保證轉(zhuǎn)向性能穩(wěn)定并減少輪胎的磨損。
2 建模仿真
2.1 多體模型建立
采用CAD軟件建立的3D幾何模型如圖2所示。根據(jù)原狀態(tài)ATV的相關(guān)幾何坐標(biāo)參數(shù)在ADAMS View中建立了“前懸架系統(tǒng)-轉(zhuǎn)向系統(tǒng)”總成虛擬樣機(jī)多體模型如圖3所示。

圖2 原始3D幾何模型
圖3 “前懸架系統(tǒng)-轉(zhuǎn)向系統(tǒng)”多體模型
該總成由轉(zhuǎn)向系統(tǒng)和懸架系統(tǒng)組成。如圖3所示,轉(zhuǎn)向系統(tǒng)包括轉(zhuǎn)向柱、轉(zhuǎn)向柱下聯(lián)板、轉(zhuǎn)向拉桿;懸架系統(tǒng)包括轉(zhuǎn)向節(jié)、輪轂、上搖臂、下?lián)u臂和車架。各構(gòu)件主要由運(yùn)動(dòng)副連接。試驗(yàn)臺(tái)與大地由平移副連接可在豎直方向上滑動(dòng),車架與大地固聯(lián)。
2.2 試驗(yàn)設(shè)計(jì)與仿真分析
2.2.1 原地轉(zhuǎn)向試驗(yàn)設(shè)計(jì)
在進(jìn)行仿真前模型簡(jiǎn)化假設(shè)如下:(1)模型中部件間運(yùn)動(dòng)副都視為理想運(yùn)動(dòng)副,內(nèi)部無間隙及摩擦力;(2)零部件都視為不可變形的剛體。
第三,包容性和保護(hù)性。作為兒童福利制度的基礎(chǔ),困境兒童概念體系的建立,需要考慮到兒童保護(hù)的各個(gè)方面。盡量使用包容性的詞匯,避免各種歧視性和排斥性的詞匯。
對(duì)多體模型進(jìn)行原地轉(zhuǎn)向仿真,在轉(zhuǎn)向柱上添加驅(qū)動(dòng)以模擬轉(zhuǎn)向柱由中心位置轉(zhuǎn)動(dòng)到某側(cè)極限位置(0°~ 45°)的工況。
由cotα-cotβ=K/L可知,外輪的轉(zhuǎn)角可由內(nèi)輪的轉(zhuǎn)角表示,理論外輪轉(zhuǎn)角αβt可表示為:
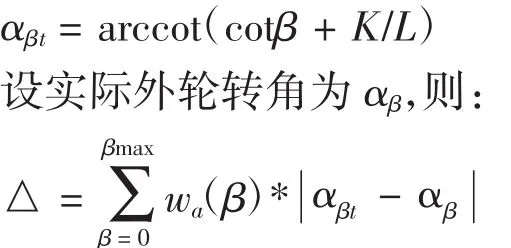
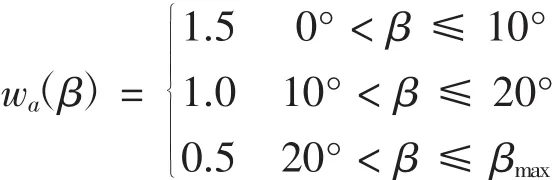
其中,wa(β)為權(quán)重系數(shù)。不同工況下對(duì)阿克曼轉(zhuǎn)角誤差要求也不同,一般在最常用的小轉(zhuǎn)角以及車輪小幅跳動(dòng)工況時(shí)應(yīng)盡量小,而在不常用的大轉(zhuǎn)角大幅跳動(dòng)工況時(shí),可以適當(dāng)降低要求。對(duì)于wa(β),考慮到大部分工況下車輪轉(zhuǎn)角都小于20°,并且10°以內(nèi)的小轉(zhuǎn)角使用頻率較高,wa(β)可認(rèn)為是分段函數(shù):
2.2.2 車輪同步跳動(dòng)試驗(yàn)設(shè)計(jì)
一般由兩個(gè)標(biāo)準(zhǔn)來評(píng)價(jià)轉(zhuǎn)向輪定位參數(shù)設(shè)置的合理程度:
(1)轉(zhuǎn)向輪中心和車身靜平衡時(shí)轉(zhuǎn)向輪的定位參數(shù)和預(yù)設(shè)值之間的符合程度。
對(duì)多體模型進(jìn)行轉(zhuǎn)向輪同步跳動(dòng)試驗(yàn),在試驗(yàn)臺(tái)上施加平移驅(qū)動(dòng)模擬轉(zhuǎn)向輪中心由最下端運(yùn)動(dòng)到最上端的工況(-40 mm~140 mm).
3 優(yōu)化分析
轉(zhuǎn)向梯形首先應(yīng)滿足阿克曼轉(zhuǎn)向特性的要求,同時(shí)使得車輪在正常的跳動(dòng)范圍內(nèi)車輪前束角變化量最小。優(yōu)化時(shí)應(yīng)根據(jù)這兩個(gè)設(shè)計(jì)要求來設(shè)計(jì)約束條件和目標(biāo)函數(shù)。
根據(jù)設(shè)計(jì)部門的要求只能對(duì)轉(zhuǎn)向柱下聯(lián)板的安裝位置和幾何形狀進(jìn)行調(diào)整,圖4展示了該下聯(lián)板的位置,對(duì)應(yīng)的設(shè)計(jì)變量分別為:下聯(lián)板偏移距、臂長(zhǎng)、臂夾角。
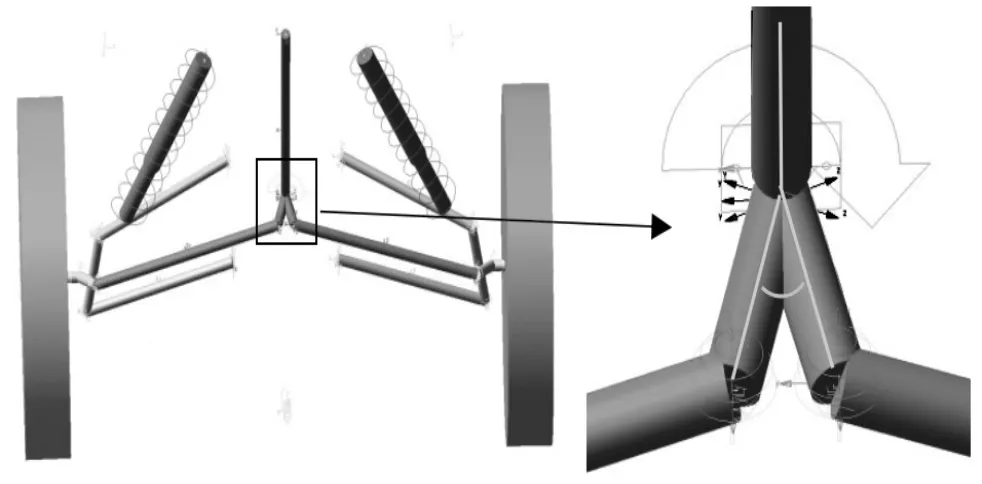
圖4 下聯(lián)板位置示意圖
優(yōu)化模型參數(shù)設(shè)置如表1所示,優(yōu)化結(jié)果見表2,為了方便對(duì)比表2中同時(shí)展示了原狀態(tài)的相關(guān)數(shù)據(jù)。
表1 優(yōu)化模型參數(shù)設(shè)置
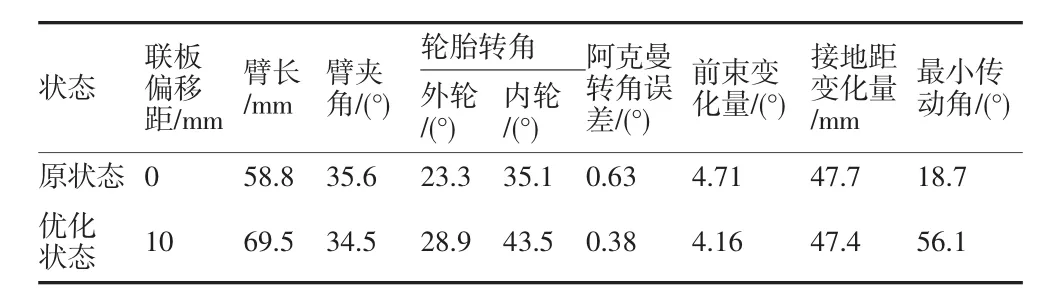
表2 優(yōu)化結(jié)果
優(yōu)化結(jié)果顯示:在原地轉(zhuǎn)向時(shí),相同的方向盤轉(zhuǎn)角,優(yōu)化狀態(tài)內(nèi)輪和外輪的極限轉(zhuǎn)角以及最小傳動(dòng)角都遠(yuǎn)大于原狀態(tài),同時(shí)阿克曼轉(zhuǎn)角誤差稍小于原狀態(tài),即轉(zhuǎn)向能力更強(qiáng)更省力更順暢;在輪胎同步跳動(dòng)時(shí),相同的輪胎跳動(dòng)量,優(yōu)化狀態(tài)前束變化量和接地距變化量都稍小于原狀態(tài),即輪胎磨損機(jī)會(huì)稍小。
4 效果驗(yàn)證
為了驗(yàn)證優(yōu)化效果,對(duì)原車、優(yōu)化車和競(jìng)品車進(jìn)行了最小轉(zhuǎn)彎試驗(yàn)和蛇行試驗(yàn)。受試驗(yàn)條件所限,蛇行試驗(yàn)僅對(duì)比往返最短通過時(shí)間(同駕駛員、同場(chǎng)地、同路徑)。試驗(yàn)現(xiàn)場(chǎng)如圖5、圖6所示,試驗(yàn)結(jié)果如表3所列。

圖5 最小轉(zhuǎn)彎試驗(yàn)

圖6 蛇行試驗(yàn)
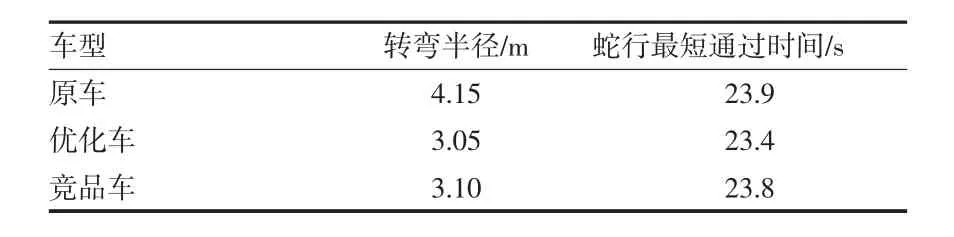
表3 試驗(yàn)結(jié)果
試驗(yàn)結(jié)果表明:優(yōu)化車的轉(zhuǎn)向性能遠(yuǎn)優(yōu)于原車,接近甚至優(yōu)于競(jìng)品車。
5 總結(jié)
本文以某ATV為載體,對(duì)轉(zhuǎn)向性能進(jìn)行了仿真分析,通過仿真優(yōu)化分析確定了優(yōu)化方案。經(jīng)實(shí)車驗(yàn)證,確認(rèn)優(yōu)化方案達(dá)到了比較理想的效果,在基本不增加成本的基礎(chǔ)上整車轉(zhuǎn)向性能大幅提高達(dá)到競(jìng)品水平,專業(yè)駕駛員主觀評(píng)價(jià)認(rèn)為整車操穩(wěn)性能甚至優(yōu)于競(jìng)品,達(dá)到預(yù)期目標(biāo)。
[1]王霄峰.汽車底盤設(shè)計(jì)[M].北京:清華大學(xué)出版社,2010.
[2]Er.Neeraj Singh Gautam,Prashant Awadhiya.Kinematic Syn thesis of a Modified Ackermann Steering Mechanism for Auto mobiles[C]//Vehicle Dynamics and Intelligent Control Systems,CA,USA:Asia Pacific Automotive Engineering Conference,August,2007.
[3]Manfred Mitschke.Dynamik der Kraftfahrzeuge[M].Version4.German,2009.
[4]周 兵,楊 凡,徐 琪.基于ADAMS的轉(zhuǎn)向機(jī)構(gòu)的優(yōu)化設(shè)計(jì)[J].湖南大學(xué)學(xué)報(bào)(自然科學(xué)版),2008(12):23-26.
Optimization of ATV Steering System Based on Virtual Prototype
ZHAO Dong-sheng,LIU Jin-wei,YAN Tian-xiong,ZHU Ming-chao
(Loncin Co.,Ltd.,Chongqing 400052,China)
Aiming at the existing problems of ATV products in a company,the dynamic model of“front suspensionsteering system”was established by using virtual prototyping technology,and the steering system was optimized and optimized according to the theory of steering system design.Based on the existing experimental conditions to develop a suitable test program,verified by the actual vehicle to achieve the desired effect.
virtual prototyping;ATV;steering system;optimization
U489
A
1672-545X(2017)10-0225-04
2017-07-10
趙東升(1983-),男,河南南陽人,工程碩士,工程師,研究方向:車輛操穩(wěn)平順性控制。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24