機(jī)動目標(biāo)攔截末制導(dǎo)技術(shù)研究*
2018-01-02 17:24:48董霓徐俊艷
現(xiàn)代防御技術(shù) 2017年6期
董霓,徐俊艷
(1.北京電子工程總體研究所,北京 100854;2.航天系統(tǒng)仿真重點實驗室,北京 100854)
0 引言
一般地,反彈道導(dǎo)彈的攔截過程作戰(zhàn)空域較高,主要在大氣層外飛行,空氣較為稀薄,很難依靠氣動力實現(xiàn)導(dǎo)彈的攔截。作為防御的彈道導(dǎo)彈一般都帶有自動尋的導(dǎo)引頭等探測裝置,以及攔截裝置,便于在接近目標(biāo)時實現(xiàn)直接碰撞來達(dá)到攔截敵方導(dǎo)彈的目的。隨著防御技術(shù)的發(fā)展,敵方彈道導(dǎo)彈的攻擊能力也逐漸增強(qiáng),機(jī)動目標(biāo)為了躲避攔截,需要研究具有攔截機(jī)動目標(biāo)能力的導(dǎo)彈制導(dǎo)控制系統(tǒng),末制導(dǎo)的制導(dǎo)精度將直接的影響到整個攔截過程的成功率。對于目前應(yīng)用的絕大多數(shù)制導(dǎo)律而言,其基本思想都是通過抑制視線轉(zhuǎn)率發(fā)散并控制其達(dá)到零為主要手段來實現(xiàn)精確制導(dǎo)。因此,視線轉(zhuǎn)率參數(shù)信息是制導(dǎo)控制系統(tǒng)中的重要參數(shù)。目標(biāo)的運動主要分為非機(jī)動運動和機(jī)動運動兩種形式,本文針對機(jī)動目標(biāo)進(jìn)行末制導(dǎo)技術(shù)的相關(guān)研究。
彈道導(dǎo)彈的攔截在控制系統(tǒng)設(shè)計方面有兩個主要問題,一是對于目標(biāo)運動狀態(tài)的信息估計;二是制導(dǎo)控制方法研究。其中,有效的目標(biāo)運動狀態(tài)估計是保證制導(dǎo)精度的前提。在導(dǎo)引頭的探測精度很難進(jìn)一步提高的情況下,通過軟件方法提高目標(biāo)運動狀態(tài)的估計精度是一個較為有效的手段。本文通過對目標(biāo)運動狀態(tài)的估計來達(dá)到提高視線轉(zhuǎn)率精度的目的,并針對目標(biāo)機(jī)動采用具有強(qiáng)魯棒性的滑模變結(jié)構(gòu)制導(dǎo)律來實現(xiàn)有效防御。
1 彈目相對運動方程建立
為了得到帶目標(biāo)機(jī)動加速度的視線轉(zhuǎn)率計算表達(dá)式,下面在發(fā)射慣性系中建立導(dǎo)彈-目標(biāo)相對運動方程。在視線坐標(biāo)系中,取相對距離矢量r,對時間求一階導(dǎo)數(shù)有

(1)

再對式(1)求時間的二階導(dǎo)數(shù)有
(2)
式中:下標(biāo)F代表表達(dá)式在發(fā)射慣性坐標(biāo)系下的數(shù)學(xué)意義;同理有下標(biāo)4代表表達(dá)式在視線坐標(biāo)系下的數(shù)學(xué)意義。
經(jīng)整理,并忽略計算過程中的二階小量,可得到彈目相對方程為
(3)
式中:at為目標(biāo)加速度;am為導(dǎo)彈加速度。
式(3)則為帶有目標(biāo)機(jī)動加速度的彈目相對運動方程。
2 機(jī)動目標(biāo)攔截末制導(dǎo)信息研究
2.1 視線轉(zhuǎn)率信息提取
相較傳統(tǒng)的視線轉(zhuǎn)率提取過程,以往的做法是忽略目標(biāo)機(jī)動加速度,將其含在系統(tǒng)的量測噪聲中一并處理。本文針對目標(biāo)機(jī)動,采用Singer模型對其加速度運動信息做了濾波估計,在視線轉(zhuǎn)率提取的過程中,考慮目標(biāo)機(jī)動加速度變化對濾波系統(tǒng)的影響[1-3]。
假定目標(biāo)加速度a(t)的自相關(guān)函數(shù)為
(4)
式中:σa為目標(biāo)加速度方差。
經(jīng)離散化得到
a(k+1)=e-αTa(k)+w(k+1),
(5)
對式(5)兩邊同時取期望,進(jìn)行數(shù)學(xué)運算,可得
E(a(k+1))=E(e-αTa(k)+w(k+1))=
E(e-αTa(k))+E(w(k+1))=E(e-αTa(k)).
(6)
由于卡爾曼濾波是最小均方意義下的濾波方法,則有


(7)
代入式(7),得到
(8)
對式(8)進(jìn)行變換有
(9)

運用現(xiàn)代控制理論知識,并選取狀態(tài)變量為i再將式(9)寫成狀態(tài)方程形式,可得
(10)
式中:Δay=aty-amy;Δaz=atz-amz。
經(jīng)分析,系統(tǒng)矩陣為線性部分,輸入矩陣中rcosx1項呈現(xiàn)為非線性項。由于實際中,x1為一個很小的值,因此非線性項cosx1變化很小,微乎其微,考慮該非線性項和忽略該項仿真結(jié)果幾乎不受到影響。因此,實際仿真中,認(rèn)為高低視線角為小量,則本節(jié)推導(dǎo)的公式均可以看作線性狀態(tài)方程處理,簡化了實際的濾波計算過程。視線轉(zhuǎn)率濾波系統(tǒng)的量測值為導(dǎo)引頭輸出的視線角,分別為高低角qε、方位角qβ。式(10)中,Δay,Δaz可以經(jīng)濾波估計得到的目標(biāo)機(jī)動加速度得出。
2.2 滑模變結(jié)構(gòu)末制導(dǎo)律研究
隨著目標(biāo)運動復(fù)雜程度的增加,傳統(tǒng)的制導(dǎo)律已經(jīng)不能滿足攔截彈的需求,為了快速響應(yīng)目標(biāo)的機(jī)動加速度的運動變化情況,考慮到滑模變結(jié)構(gòu)制導(dǎo)律較強(qiáng)的魯棒性,選取滑模變結(jié)構(gòu)制導(dǎo)律進(jìn)行制導(dǎo)過程的研究[5]。
考察視線坐標(biāo)系內(nèi)的相對運動形式,在末制導(dǎo)過程中,可以將相對運動分解為縱向平面O4x4y4和側(cè)向平面的運動O4x4z4。
(11)
式中:u1=amy(t);u2=aty(t)。

ε(λ)>0,f(0,λ)=0,sf(s,λ)>0,
ifs≠0,
(12)
式中:λ為系統(tǒng)參數(shù)。
令系統(tǒng)的自適應(yīng)滑模趨近律為
k=const>0,ε=const>0.
(13)

已知s=r(t)x2代入自適應(yīng)動態(tài)滑模表達(dá)式中,有

(14)
經(jīng)過數(shù)學(xué)變化可以得到

(15)
由狀態(tài)方程有
(16)
通過式(15)和(16)可以得出:
(17)
當(dāng)小時間間隔δt取得無限小時,可以認(rèn)為縱向平面內(nèi)的視線角增量為qε變化很小,且視線角qε本身也為小量。在縱向平面內(nèi),容易實現(xiàn)得到的縱向平面自適應(yīng)滑模變結(jié)構(gòu)的導(dǎo)引律表達(dá)式為
(18)
式(18)中引入的符號項函數(shù)sgns是非連續(xù)函數(shù),在趨近于滑模動態(tài)平面時,容易帶來高頻的抖動現(xiàn)象,并誘發(fā)攔截彈彈體產(chǎn)生共振現(xiàn)象,這點對于處于末制導(dǎo)關(guān)鍵階段的導(dǎo)彈是非常不利的[10-15]。工程應(yīng)用中,一般選取高增益函數(shù)近似代替式(18)中的符號函數(shù)項,對抑制抖動有明顯的效果。
(19)

3 機(jī)動目標(biāo)攔截末制導(dǎo)仿真結(jié)果
3.1 仿真條件
仿真過程初始參數(shù)如下述:
導(dǎo)彈運動初始條件:在慣性坐標(biāo)系下,導(dǎo)彈初始位置為x0=60 km,y0=20 km,z0=-6 km,初始速度vx0=3 km/s,vy0=100 m/s,vz0=-200 m/s。
目標(biāo)運動初始條件:在慣性坐標(biāo)系下,目標(biāo)初始位置為xt0=67 km,yt0=30 km,zt0=10 km,初始速度vtx0=-400 m/s,vty0=1 km/s,vtz0=2 km/s。

3.2 仿真結(jié)果
本節(jié)中給出的仿真結(jié)果如圖1~6所示,是在導(dǎo)彈和目標(biāo)相對距離為25 km時,目標(biāo)開始做正弦機(jī)動。此時,量測系統(tǒng)裝置測量到目標(biāo)位置的變化,制導(dǎo)系統(tǒng)通過目標(biāo)機(jī)動加速度估計環(huán)節(jié)預(yù)估出目標(biāo)當(dāng)前的機(jī)動加速度,目標(biāo)機(jī)動加速度信息的變化反饋到視線轉(zhuǎn)率信息中,制導(dǎo)律以抑制視線轉(zhuǎn)率發(fā)散并控制其達(dá)到零為目的,實現(xiàn)對機(jī)動目標(biāo)的有效制導(dǎo)。

圖1 攔截過程相對運動關(guān)系Fig.1 Relative movement trajectory

圖2 攔截過程脫靶量變化曲線Fig.2 Miss distance curve of intercepting process

圖3 視線角速率濾波曲線Fig.3 Curve of line of sight rate
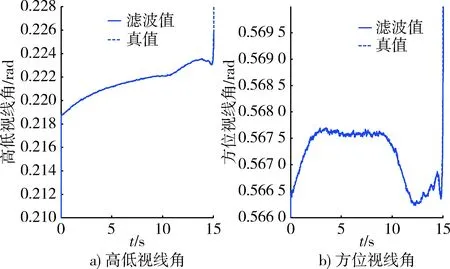
圖4 視線角濾波曲線Fig.4 Curve of line of sight
當(dāng)目標(biāo)在兩者相對距離為20 km時做幅值(過載)為2的機(jī)動運動時,若采用傳統(tǒng)的比例導(dǎo)引,即使有目標(biāo)加速度的估計環(huán)節(jié)也很難命中目標(biāo)。圖7所示,若采用傳統(tǒng)的比例導(dǎo)引應(yīng)對機(jī)動目標(biāo),會造成較大的脫靶量。因此,對于機(jī)動目標(biāo),基于估計目標(biāo)機(jī)動加速度的方法采用滑模變結(jié)構(gòu)制導(dǎo)律,可以有效實現(xiàn)對機(jī)動目標(biāo)的攔截。

圖5 相對距離和相對速度曲線Fig 5 Curve of relative distance and relative velocity

圖6 目標(biāo)機(jī)動加速度估計曲線Fig.6 Curve of estimated target maneuvering acceleration

圖7 攔截過程脫靶量變化曲線Fig.7 Miss distance curve of intercepting process with non maneuvering target via PNG
4 結(jié)束語
本文研究了機(jī)動目標(biāo)的視線轉(zhuǎn)率算法,將目標(biāo)機(jī)動加速度的估計值帶入導(dǎo)彈-目標(biāo)相對運動方程中,可以得到含有目標(biāo)機(jī)動的視線轉(zhuǎn)率方程。經(jīng)過仿真分析可以發(fā)現(xiàn),含有目標(biāo)機(jī)動加速度的視線轉(zhuǎn)率信息精度高于不含機(jī)動信息的視線轉(zhuǎn)率,并且隨著目標(biāo)機(jī)動強(qiáng)度的增大,估計目標(biāo)機(jī)動加速度的必要性增加。針對機(jī)動目標(biāo),以往的傳統(tǒng)制導(dǎo)律不再適用,在獲得含有機(jī)動信息的視線轉(zhuǎn)率后,考慮具有強(qiáng)魯棒性的滑模變結(jié)構(gòu)制導(dǎo)律,并將目標(biāo)的機(jī)動加速度信息作為制導(dǎo)律的輸入?yún)?shù)。經(jīng)過仿真分析,證明了估計機(jī)動加速度的必要性,并且滑模變結(jié)構(gòu)制導(dǎo)律對目標(biāo)機(jī)動具有較強(qiáng)的適用性,控制效果較好。
[1] SINGER R A.Estimating Optimal Tracking Filter Performance for Manned Maneuvering Targets[J].IEEE Trans.on Aerospace and Electrical System,1970,6(7):473-483.
[2] 王軍政,沈偉,趙江波.機(jī)動目標(biāo)跟蹤中機(jī)動頻率的自適應(yīng)調(diào)整[J].北京理工大學(xué)學(xué)報,2007,27(1):38-41.
WANG Jun-zheng,SHEN Wei,ZHAO Jiang-bo.Adaptive Adjustment of Maneuvering Frequency in Target Tracking[J].Journal of Beijing Institute of Technology,2007,27(1):38-41.
[3] 劉昌云,劉進(jìn)忙,陳長興,等.機(jī)動目標(biāo)跟蹤的機(jī)動頻率自適應(yīng)算法[J].控制理論與應(yīng)用,2004,21(6):961-965.
LIU Chang-yun,LIU Jin-mang,CHEN Chang-xing,et al.Maneuvering Frequency Adaptive Algorithm of Tracking a Maneuvering Object[J].Control Theory & Applications,2004,21(6):961-965.
[4] MEHROTRA K,MAHAPATRA P R.A Jerk Model for Tracking Highly Maneuvering Targets[J].IEEE Transaction on Aerospace and Electronic Systems,1997,33(4):1094-1105.
[5] 周荻.尋的導(dǎo)彈新型導(dǎo)引規(guī)律[M],北京:國防工業(yè)出版社,2002.
ZHOU Di.New Guidance Law for Homing Missile[M].Beijing:National Defense Industry Press,2002.
[6] 何友,修建娟,張晶煒,等.雷達(dá)數(shù)據(jù)處理及應(yīng)用[M].北京:電子工業(yè)出版社,2009.
HE You,XIU Jian-juan,ZHANG Jing-wei,et al.Radar Data Processing with Applications[M].Beijing:Publishing House of Electronics Industry,2009.
[7] LAWRENCE R V.Precision Guidance Against Maneuvering Targets[C]∥Proceedings of the American Control Conference (Seattle WA,USA) USA:American Automatic Control Council,1995:4127-4130.
[8] ZARCHAN P.Tactical and Strategic Missile Guidance[M].3rd ed.Washington DC,USA:American Institute of Aeronautics and Astronautics,1997.
[9] RICKERG G,WILLIAMS J R.Adaptive Tracking Filter for Maneuvering Targets[J].IEEE Transaction on Aerospace and Electronic System,1978,AES-14:185-193.
[10] BEZICK S,Han Rusnak,Steven Gray W.Guidance of a Homing Missile via Nonlinear Geometric Control Methods[J].Journal of Guidance,Control and Dynamics,1995,18(3):441-448.
[11] BABUK R,SARMA I G,SWAMY K N.Switched Bias Proportiona Navigation for Homing Guidance Against Highly Maneuvering Target[J].Journal of Guidance, Control,and Dynamics,1994,17(5):1357-1363.
[12] ZHOU Di,MU Chun-di,XU Wen-li.Adaptive Sliding-mode Guidance of a Homing Missile[J].Journal of Guidance, Control, and Dynamics,1999,22(4):589-594.
[13] LI R X,JILKOV V P.A Survey of Maneuvering Target Tracking:Dynamic Models[C]∥Proceedings of SPIE,2000,4048:212-236.
[14] JULIER S J,UHLMANN J K,DURRANT-Whyte H F.A New Method for the Nonlinear Transformation of Means and Covariances in Filters and Estimators[J].IEEE Trans.on Automatic Control,2000,45(3):477-482.
[15] WAN E A,MERWE R V.The Unscented Kalman Filter for Nonlinear Estimation[C]∥IEEE Symposium 2000(AS-SPCC),Lake Louise,Alberta,Canada,Oct.2000:153-158.