彈載前斜視SAR BP成像算法與實現*
2018-01-02 17:12:12張筱靖何岷賀志毅張鈞
現代防御技術 2017年6期
關鍵詞:信號
張筱靖,何岷,賀志毅,張鈞
(北京遙感設備研究所,北京 100039)
0 引言[1-3]
國外彈載合成孔徑雷達(synthetic aperture radar,SAR)系統已經投入使用,許多戰術導彈導引頭都采用了SAR技術,主要應用于目標探測及識別、導航彈道修正等領域。在彈載SAR處理過程中,通常會涉及下面2個重要的技術問題:①彈道前側方大斜視角成像;②快速成像以提供足夠高的數據率供導彈控制使用。因此選用合理的成像處理方法是非常重要的。
常規SAR成像一般是對進行飛行軌跡正側方附近區域進行成像,而前斜視SAR的成像區域靠近飛行軌跡(彈道),算法實現難度更大。后向投影(back project,BP)是一種時域成像算法,其成像過程就是計算各方位時刻雷達平臺位置與目標點的瞬時斜距,進行相位補償后再將不同方位時刻對應的回波信號進行相干累加,最后得出目標二維圖像的過程。BP算法在原理上不存在任何理論近似,解決了距離方位耦合的問題,因此適用于彈載大斜視角或者非線性航跡等復雜成像幾何下的成像聚焦處理。
本文提出一種逐脈沖SAR實時成像算法,該算法在BP算法基礎上進行改進,具備逐脈沖實時處理的特性,適合彈載條件下的延遲時間短、實時率高、快速成像的特點。仿真和機載驗證表明,該方法可以有效進行大前斜視角的SAR成像,實現SAR實時成像處理。
1 BP成像算法原理[4-8]
1.1 前斜視SAR成像幾何關系
前斜視SAR成像的幾何關系如圖1所示。
導彈在末制導階段大斜視角成像場景如圖1所示,此時前斜視角θsq一般在80°以上,對應圖2中的地面水平方位角θ0小于10°。O為目標成像區域的中心點,在北天東坐標系下的坐標為(Tx,Ty,Tz)。設導彈在t0時刻位置坐標(Px,Py,Pz),運動速度(vx,vy,vz),加速度(ax,ay,az)。則在ti時刻,導彈與目標間斜距為
(1)

圖1 前斜視SAR成像幾何關系Fig.1 Squinted mode SAR model
圖2為水平面內導彈與目標的幾何關系。由圖可見,在成像的相干積累時間t內,導彈可近似認為沿切向飛行了一小段直線。導彈相對于目標的視角變化[9]為
Δθ=vtsinθ0/R0.
(2)
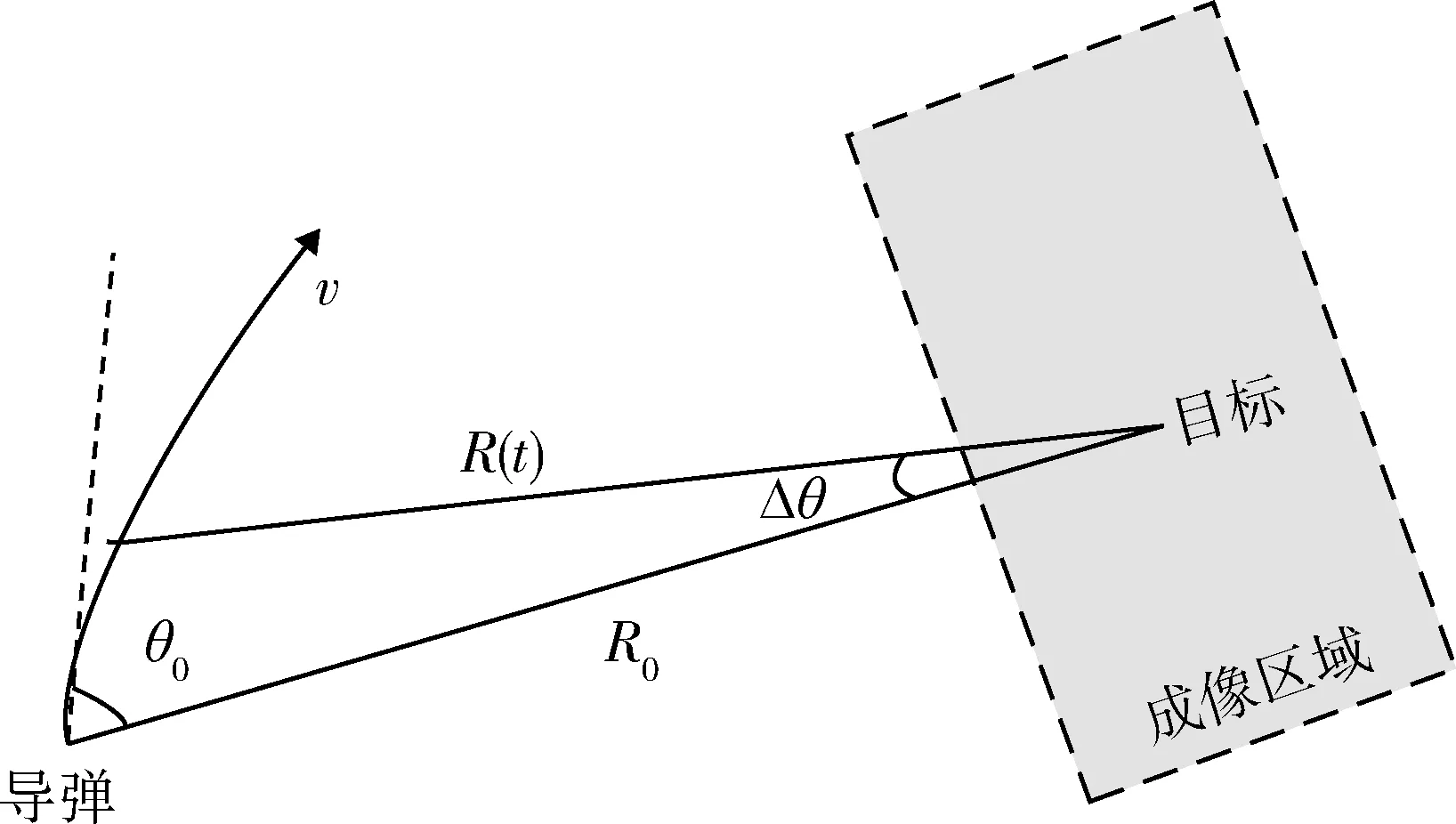
圖2 水平面內導彈與目標幾何關系Fig.2 Relations between missile and target on plane ground
前斜SAR的方位分辨率[10]為

(3)
可見彈載SAR的方位分辨率與彈道以及成像幾何關系有密切關系,其值依賴于許多參數包括地距R0、飛行速度v、積累時間t、水平方位角θ0等。當SAR雷達系統其他參數固定時,為獲得更佳的方位分辨率,總是盡可能的增大水平方位角。
1.2 回波信號模型[11-14]
雷達發射信號為線性調頻信號,回波信號為發射信號的調制和延遲的結果,經解調后,回波信號表達式[15]為
(4)
式中:τ為距離向快時間變量;Kr為發射LFM信號的調頻率;ti方位向慢時間變量;R(ti)為距離歷程模型;λ為載波波長;σ為回波幅度。
在回波信號式(4)中,由距離歷程模型R(ti)引入的相位變化為

(5)
脈壓后的回波信號表達式為
s1(ti,τ)=IFFT{S0(ti,fτ)H(fτ)}=
(6)
式中:fτ為距離頻域變量;H(fτ)為頻域匹配濾波函數;S0(ti,fτ)為回波信號頻域表達式,有
(7)

(8)
式中:T為信號持續時間。
由式(6)可知,經過脈沖壓縮后,距離歷程模型R(ti)的影響體現在點目標的回波信號包含2項:第1指數項為R(ti)帶來的相位延遲,主要影響目標的峰值相位;第2指數項為R(ti)帶來的距離延遲,主要影響目標的峰值位置,峰值位置的變化就是距離徙動現象。
1.3 相干積累
BP算法通過實時獲取導彈與目標間的瞬時斜距,并根據此斜距信息進行相應的相位補償,然后將回波信號反向投影至成像區域進行相干累加,從而實現對目標區域的精確成像。
具體地,將成像區域目標場景用一個距離-方位的二維矩陣來表示。對于場景中的每一點矩陣元素(xj,yj),存在確定的距離歷程函數。利用該距離歷程函數,就可以從脈壓后的回波數據中找到該點目標對應的幅度值。將所有投影到成像區域的回波進行相干疊加,即可得到目標的SAR圖像:

(9)
式中:s1(ti,τ)為脈壓后回波信號;R(ti,xj,yj)為ti時刻導彈與成像區域各像素點(xj,yj)間的斜距。
1.4 運動補償
運動補償的目的是實時計算出每個脈沖收發時刻,天線相位中心在參考坐標系下的坐標變化量,然后根據式(5)轉化為回波相位的補償值。要完成高分辨SAR成像,精確的運動補償是不可缺少的。彈載雷達通過慣導裝置獲得用于運動補償的信息,包括:彈體位置坐標、速度矢量、加速度矢量,成像區域中心點位置坐標等。彈載雷達據此遞推出每個脈沖收發時刻的精確彈目幾何關系。
為了圖像能良好聚焦,必須保證回波補償精度,精度保證由2部分實現:①數據源精度:即慣導裝置提供的數據的測量精度、測量周期、數據格式的表示精度等。為避免補償后的方位向散焦,慣導測速精度通常要保持在1 m/s的量級;②彈載雷達內部DSP計算精度:即DSP軟件需要充分利用慣導的數據,完成無損的運動補償計算,數字量坐標計算精度通常滿足1/20波長的要求。
1.5 逐脈沖SAR實時成像算法處理流程
圖3為逐脈沖SAR實時成像算法的基本步驟。成像過程中,需要先生成成像區域在參考坐標系下的網格坐標。網格坐標尺寸的選取要根據信號處理的計算能力,一般小于或等于距離/方位分辨率。回波在距離向脈壓后,開始逐脈沖的方位向積累。輸入的慣導信息用于計算回波補償因子。網格中的每一像素點都對應一個運動補償因子和一個回波位置序號,將兩者復乘的結果進行相參積累,最終就可獲得成像區域的二維SAR圖像。
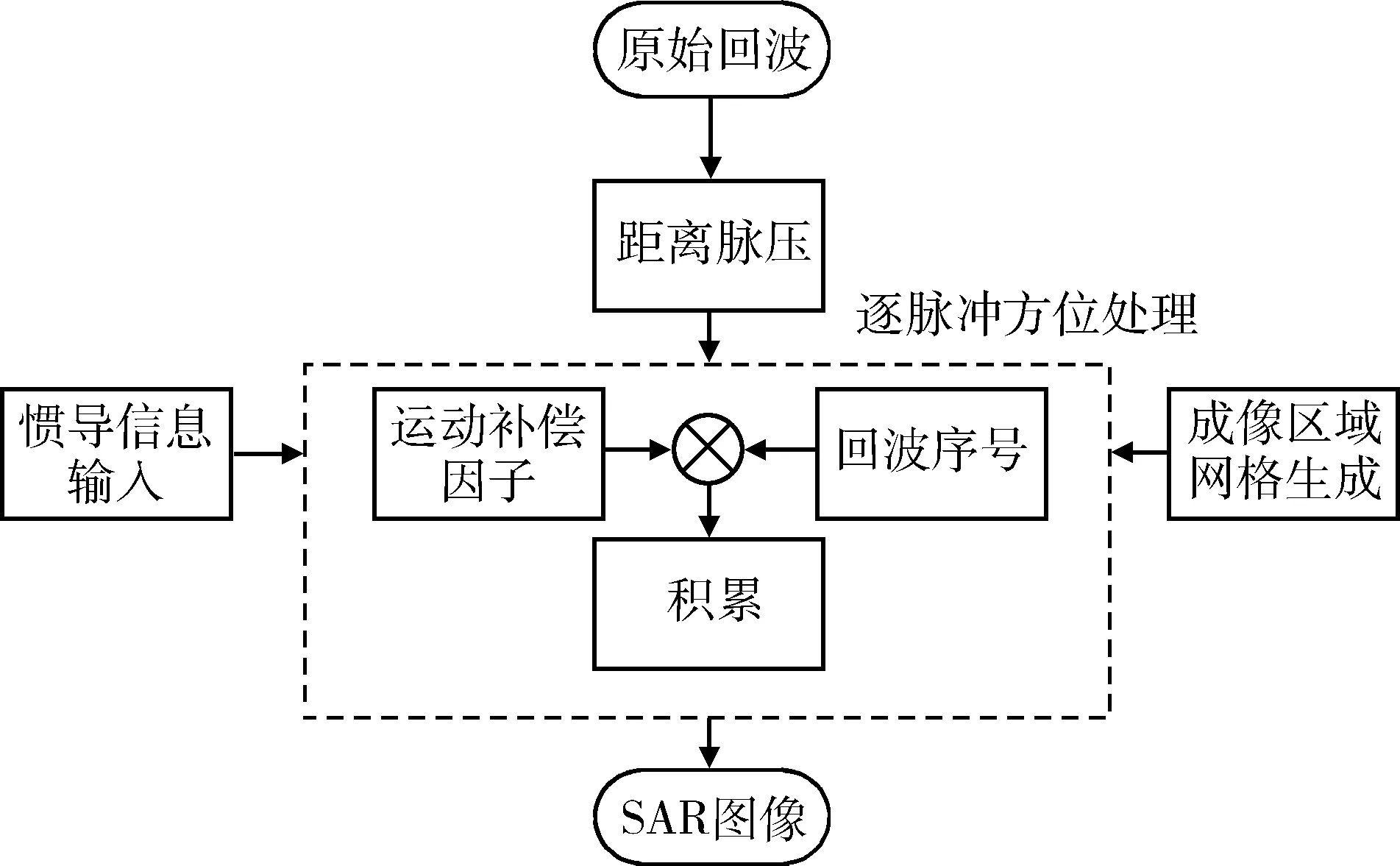
圖3 逐脈沖SAR實時成像算法步驟Fig.3 Procedures of SAR real-time imaging algorithm based on per pulse
運算量方面,當成像區域網格為N×N點且合成孔徑長度也為N點時,逐點計算的算法復雜度為O(N3)。依據目前的芯片發展水平,可以通過合理的軟硬件構架設計,克服計算量大的問題實現彈載實時成像。
2 仿真驗證
為驗證算法有效性,對圖4所示一艘長65 m,寬12 m,包含30個散射點的模型船進行回波成像仿真,散射點在空間位置上的分布圖如圖5所示,仿真參數見表1。

圖4 模型船散射點示意圖Fig.4 RCS model of a vessel

圖5 模型船散射點位置分布圖Fig.5 Distribution of RCS model of a vessel
圖6是對模型船生成回波進行BP算法處理后的SAR圖像,圖像聚焦程度良好,目標散射點特征與模型船相符。選擇圖6中最大值點作為圖像分辨率的評估點。圖7為評估點局部的三維圖像,沿圖像的方位、距離向分別作切片,得到近似的點目標沖擊響應圖。在圖8,9中根據3 dB主瓣寬度,估算出圖像的方位分辨率約為4.3 m,距離分辨率約為3.9 m,與理論值基本相符。

表1 成像仿真參數取值Table 1 Parameters of imaging simulation

圖6 模型船SAR圖像Fig.6 SAR Image of a vessel
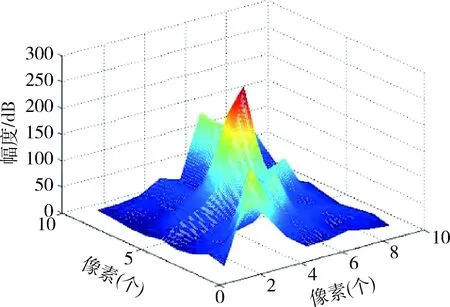
圖7 評估點三維圖像Fig.7 Image of the point target evaluated
3 試驗驗證
在機載掛飛試驗中,對地面目標進行前斜視SAR回波數據錄取,利用本文算法進行數據處理,在大斜視角、水平方位角約為7.7°的條件下獲取了預期的前斜視SAR成像結果。如圖10所示,為同一地區的光學圖像和SAR圖像。圖像中每像素代表5 m,成像區域總大小2 km×2 km。

圖8 方位向沖擊響應圖Fig.8 Impulse response along cross range direction
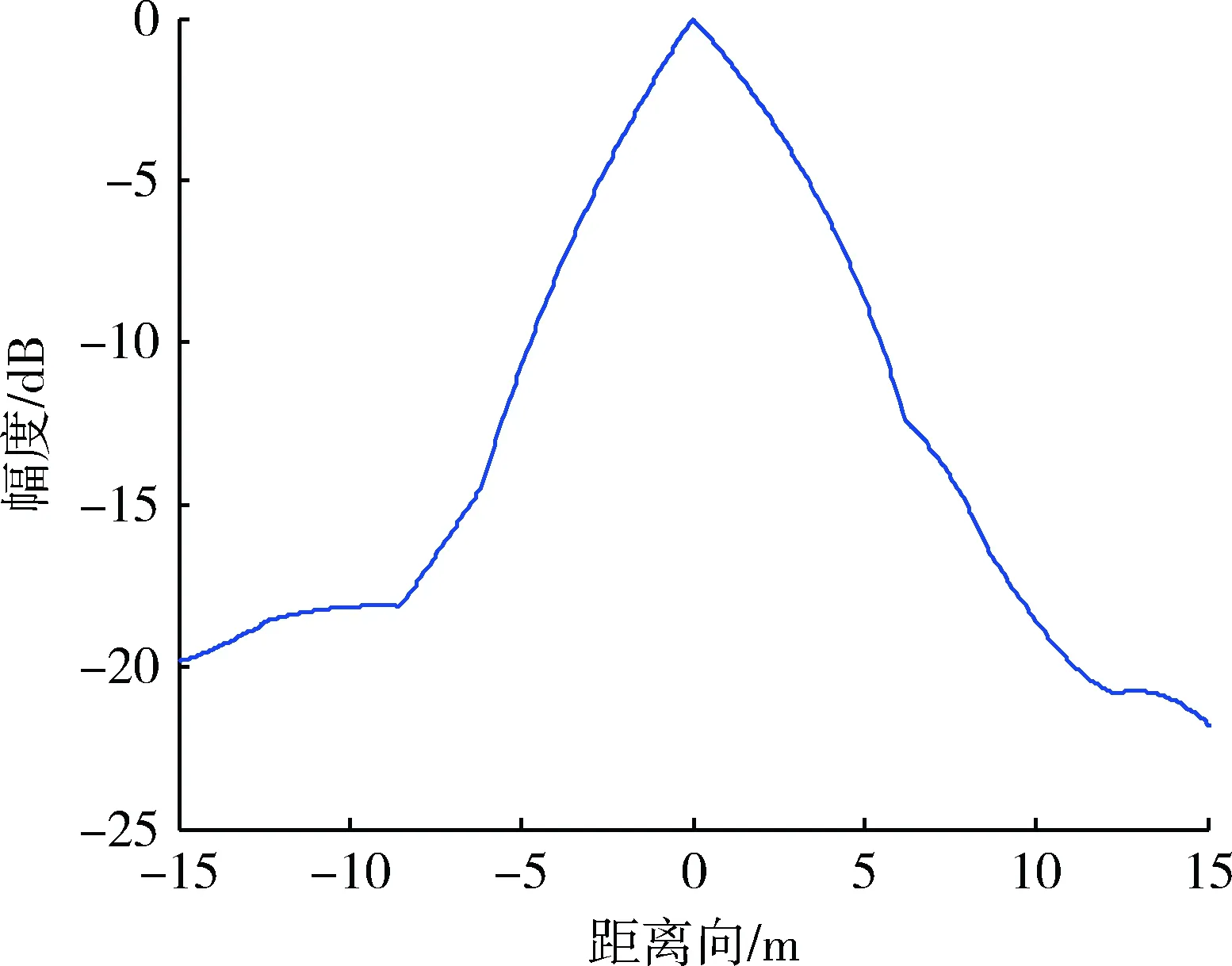
圖9 距離向沖擊響應圖Fig.9 Impulse response along range direction

圖10 機載前斜視SAR成像結果(斜距23 km)Fig.10 Air borne squinted mode SAR image result (with range 23 km)
4 結束語
大斜視角SAR在導彈末制導成像精確打擊中有著重要的應用。本文從解決彈載大斜視SAR實時成像制導問題出發,提出了一種逐脈沖的時域處理方法。對模型船的仿真 SAR圖像和機載對地成像試驗結果都表明,該算法在方位向和距離向都取得了良好的聚焦性能,可以有效解決大前斜視角的SAR成像,實現彈載SAR成像實時處理。
[1] 安道祥.高分辨率SAR成像處理技術研究[D].長沙:國防科學技術大學,2011.
AN Dao-xiang.Study on the Imaging Techniques for High Resolution SAR Systems[D].Changsha:National University of Defense Technology,2011.
[2] 鄭曉雙.機載合成孔徑雷達運動補償技術研究[D].北京:中國科學院研究生院,2007.
ZHENG Xiao-shuang.The Study of Motion Compensation for Airborne Synthetic Aperture Radar[D].Beijing:Chinese Academy of Sciences,2007.
[3] 苗慧.機載SAR定位精度的研究[D].北京:中國科學院研究生院,2007.
MIAO Hui.Research on Airborne SAR Geolocation Accuracy[D].Beijing:Chinese Academy of Sciences,2007.
[4] 劉斌.機載SAR BP算法成像的運動補償及GPU并行化實現研究[D].成都:電子科技大學,2013.
LIU bin.Research on Motion Compensation and GPU Parallel Implementation of BP Algorithm Imaging for Airborne SAR[D].Chengdu:University of Electronic Science and Technology of China,2013.
[5] 李浩林,陳露露,張磊,等.快速分解后向投影SAR成像的自聚焦算法研究[J].電子與信息學報,2014,36(4):938-945.
LI Hao-lin,CHEN Lu-lu,ZHANG Lei,et al.Study of Autofocus Method for SAR Imagery Created by Fast Factorized Backprojection[J].Journal of Electronics and Information Technology,2014,36(4):938-945.
[6] 陳思,趙惠昌,張淑寧,等.基于dechirp彈載SAR的改進后向投影算法[J].物理學報,2013,62(21):1-9.
CHEN Si,ZHAO Hui-chang,ZHANG Shu-ning,et al.An Improved Back Projection Imaging Algorithm for Dechirped Missile-Borne SAR[J].Acta Physica Sinica, 2013,62(21):1-9.
[7] 林翊青,李景文.大距離徙動情況下距離多普勒(RD)算法與后向投影(BP)算法的比較[J].雷達科學與技術,2004,2(6):349-352.
LIN Yi-qing,LI Jing-wen.Comparison of RD Algorithm and BP Algorithm Under Severe Range Migration[J].Radar Science and Technology,2004,2(6):349-352.
[8] 劉光平,梁甸農.適用于大場景高分辨合成孔徑雷達的快速BP算法[J].系統工程與電子技術,2003,25(5):546-549.
LIU Guang-ping,LIANG Dian-nong.A Fast Back-Projection Algorithm for the SAR with Large Scene and High Resolution[J].Systems Engineering and Electronics,2003,25(5):546-549.
[9] 周強,曲長文,王穎.彈載SAR大斜視擴展CS成像算法[J].彈箭與制導學報,2009,29(3):26-29.
ZHOU Qiang,QU Chang-wen,WANG Ying.Extended Chirp Scaling Approach for Onboard High Squint SAR[J].Journal of Projectiles,Rockets,Missiles and Guidance,2009,29(3):26-29.
[10] 劉永坦.雷達成像技術[M].哈爾濱:哈爾濱工業大學出版社,1999:29-31.
LIU Yong-tan.Radar Imaging Technology[M].Harbin:Publishing House of Harbin University of Technology,1999:29-31.
[11] 保錚,邢孟道,王彤.雷達成像技術[M].北京:電子工業出版社,2004.
BAO Zheng,XING Meng-dao,WANG Tong.Radar Imaging Technology[M].Beijing:Publishing House of Electronics Industry,2004.
[12] 賀知明,朱江,周波.彈載SAR實時信號處理研究[J].電子與信息學報,2008,30(4):1011-1013.
HE Zhi-ming,ZHU Jiang,ZHOU Bo.Research on Real-Time Signal Processing of the Missile-Borne SAR[J].Journal of Electronics and Information Technology,2008,30(4):1011-1013.
[13] Roger J Sullivan.Microwave Radar Imaging and Advanced Concepts[M].London:Artech House Publishers Boston-London,2000.
[14] 張明友,汪學剛.雷達系統[M].北京:電子工業出版社,2006.
ZHANG Ming-you,WANG Xue-gang.Radar System[M].Beijing:Publishing House of Electronics Industry,2006.
[15] Ian G Cumming,Frank H Wong.Digital Processing of Synthetic Aperture Radar Data Algorithms and Implementation[M].Beijing:Publishing House of Electronics Industry,2012,156-167.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06