一個(gè)類Lorenz混沌系統(tǒng)Hopf分岔反控制
2018-01-04 12:08:10張良唐駕時(shí)
振動(dòng)工程學(xué)報(bào) 2018年5期
張良 唐駕時(shí)
摘要: 對(duì)混沌系統(tǒng)進(jìn)行反控制可以實(shí)現(xiàn)分岔提前或者延遲發(fā)生,滿足工程實(shí)際需要。以一個(gè)類Lorenz混沌系統(tǒng)為研究對(duì)象,根據(jù)Routh-Hurwitz準(zhǔn)則和高維Hopf分岔理論,分析了系統(tǒng)Hopf分岔特性;提出了一種動(dòng)態(tài)狀態(tài)反饋控制法,對(duì)系統(tǒng)進(jìn)行Hopf分岔反控制。通過(guò)調(diào)控控制參數(shù),可以在預(yù)定任意位置產(chǎn)生Hopf分岔,使Hopf分岔提前或延遲發(fā)生,達(dá)到了預(yù)期的反控制目的。從分析結(jié)果看出,提出的動(dòng)態(tài)狀態(tài)反饋控制法可以避免復(fù)雜的計(jì)算過(guò)程,能夠有效地實(shí)現(xiàn)對(duì)混沌系統(tǒng)的Hopf分岔反控制。
關(guān)鍵詞: 非線性振動(dòng); 混沌系統(tǒng); Routh-Hurwitz準(zhǔn)則; Hopf分岔反控制; 動(dòng)態(tài)狀態(tài)反饋控制法
中圖分類號(hào): O322 文獻(xiàn)標(biāo)志碼:A 文章編號(hào)1004-4523(2018)05-0752-07
DOI:10.16385/j.cnki.issn.1004-4523.2018.05.004
引 言
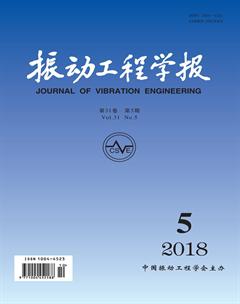
自1963年,E N Lorenz實(shí)驗(yàn)中偶然發(fā)現(xiàn)混沌吸引子,即Lorenz系統(tǒng)以來(lái),對(duì)于混沌系統(tǒng)的認(rèn)識(shí)和研究取得了極大的進(jìn)步。現(xiàn)在人們不僅關(guān)注發(fā)現(xiàn)新的混沌系統(tǒng),更關(guān)注系統(tǒng)自身混沌和分岔特性的研究。楊啟貴等[1]提出了一個(gè)新的類Lorenz系統(tǒng),分析了系統(tǒng)的規(guī)范型。Mello等[2]研究了一個(gè)三維類Lorenz系統(tǒng)的混沌吸引子,通過(guò)第一李雅普諾夫系數(shù)分析了系統(tǒng)的分岔特性。Li等[3]提出了一個(gè)新的類Lorenz混沌系統(tǒng),分析了該系統(tǒng)的同宿軌道,以及系統(tǒng)在不同平衡點(diǎn)下的分岔特性。Shan Wang等[4]提出了一個(gè)五維類Lorenz系統(tǒng),分析了系統(tǒng)分?jǐn)?shù)階分岔。
分岔控制與反控制已成為非線性動(dòng)力學(xué)研究的重點(diǎn)方向之一。而分岔反控制是分岔控制的逆過(guò)程,其主要目的是通過(guò)控制系統(tǒng)參數(shù),使系統(tǒng)在預(yù)先設(shè)置的臨界值上出現(xiàn)預(yù)期的分岔現(xiàn)象,是產(chǎn)生分岔的過(guò)程,而不是避免或者消除[5-10]。
不少學(xué)者對(duì)分岔反控制做了研究,程尊水[11]采用Washout filter法對(duì)Chen系統(tǒng)進(jìn)行Hopf分岔反控制,通過(guò)調(diào)控控制參數(shù),可以實(shí)現(xiàn)在預(yù)定的臨界值發(fā)生Hopf分岔;劉素華等[12]根據(jù)Hopf分岔理論,采用線性與非線性狀態(tài)反饋法對(duì)四維Qi系統(tǒng)零平衡點(diǎn)處的Hopf分岔進(jìn)行了反控制,分岔參數(shù)的不同,可以實(shí)現(xiàn)不同的反控制方案。Yu等[13]提出了一個(gè)新的反控制法,并以該控制法為基礎(chǔ),實(shí)現(xiàn)了一般自治系統(tǒng)的混沌化。伍新等[14]對(duì)三自由度含間隙雙面碰撞振動(dòng)系統(tǒng)的Poincaré映射叉式分岔進(jìn)行反控制,通過(guò)對(duì)控制參數(shù)的調(diào)整,可以實(shí)現(xiàn)穩(wěn)定的叉式分岔解。吳志強(qiáng)等[15]對(duì)Rssler 系統(tǒng)設(shè)置了非線性Washout控制器,對(duì)系統(tǒng)的Hopf分岔臨界值、分岔類型以及極限環(huán)等進(jìn)行了分岔控制。Zhang等[16]對(duì)一維Logistic映射設(shè)置了線性控制器,根據(jù)反饋控制法對(duì)系統(tǒng)二周期倍分岔點(diǎn)進(jìn)行了反控制,實(shí)現(xiàn)了預(yù)期目的。
文獻(xiàn)[17]提出了一種反饋控制方法,受控系統(tǒng)的平衡點(diǎn)與預(yù)設(shè)分岔臨界值有關(guān),具有一定的特殊性。以此為基礎(chǔ),本文提出了一種動(dòng)態(tài)狀態(tài)反饋控制法,不改變平衡點(diǎn)的情況下,可對(duì)系統(tǒng)進(jìn)行Hopf分岔反控制。文中以文獻(xiàn)[3]提出的三維自治類Lorenz系統(tǒng)為研究對(duì)象,根據(jù)Routh-Hurwitz準(zhǔn)則和高維Hopf分岔理論,分析了系統(tǒng)的Hopf分岔特性,采用動(dòng)態(tài)狀態(tài)反饋控制法對(duì)系統(tǒng)進(jìn)行Hopf分岔反控制,通過(guò)調(diào)控控制參數(shù),實(shí)現(xiàn)了預(yù)設(shè)的Hopf分岔現(xiàn)象的發(fā)生,達(dá)到了反控制的目的。