大粘滯摩擦因數(shù)的永磁伺服系統(tǒng)自適應(yīng)反步控制*
2018-01-05 04:41:31朱孝勇左月飛
電機(jī)與控制應(yīng)用 2017年12期
吳 晶, 朱孝勇, 左月飛, 張 超, 全 力
(江蘇大學(xué) 電氣信息工程學(xué)院,江蘇 鎮(zhèn)江 212013)
大粘滯摩擦因數(shù)的永磁伺服系統(tǒng)自適應(yīng)反步控制*
吳 晶, 朱孝勇, 左月飛, 張 超, 全 力
(江蘇大學(xué) 電氣信息工程學(xué)院,江蘇 鎮(zhèn)江 212013)
對(duì)于粘滯摩擦系數(shù)大的永磁伺服系統(tǒng),傳統(tǒng)的自適應(yīng)反步控制會(huì)導(dǎo)致參數(shù)辨識(shí)結(jié)果波動(dòng)較大、不易穩(wěn)定、轉(zhuǎn)速跟蹤性能較差。設(shè)計(jì)了一種實(shí)時(shí)辨識(shí)粘滯摩擦因數(shù)的自適應(yīng)反步控制器,同時(shí)對(duì)轉(zhuǎn)動(dòng)慣量、負(fù)載轉(zhuǎn)矩和粘滯摩擦因數(shù)進(jìn)行辨識(shí),提高了對(duì)粘滯摩擦因數(shù)較大系統(tǒng)的轉(zhuǎn)速跟蹤性能和轉(zhuǎn)動(dòng)慣量及負(fù)載轉(zhuǎn)矩辨識(shí)精度。所提方法結(jié)構(gòu)簡(jiǎn)單、易于實(shí)現(xiàn),在dSPACE公司的DS1103系統(tǒng)試驗(yàn)平臺(tái)上對(duì)其進(jìn)行了試驗(yàn)驗(yàn)證,試驗(yàn)結(jié)果表明了所提方法的正確性和有效性。
永磁同步電機(jī);粘滯摩擦因數(shù);自適應(yīng)反步控制;轉(zhuǎn)動(dòng)慣量
0 引 言
永磁同步電動(dòng)機(jī)(Permanent Magnet Synchronous Motor,PMSM)以其結(jié)構(gòu)簡(jiǎn)單、運(yùn)行可靠、高功率密度和高效率等優(yōu)點(diǎn),被廣泛應(yīng)用于工業(yè)機(jī)器人、精密數(shù)控機(jī)床和航空航天等伺服系統(tǒng)領(lǐng)域。其控制結(jié)構(gòu)大多采用雙閉環(huán)的PI控制器,但PI控制方法不僅對(duì)系統(tǒng)參數(shù)的不確定性敏感、抗干擾能力弱,而且對(duì)負(fù)載變化的適應(yīng)能力不強(qiáng);而PMSM作為伺服電機(jī)應(yīng)用受到未知負(fù)載、摩擦等機(jī)械參數(shù)變化的影響,線性PI控制不能滿足控制性能要求[1]。對(duì)此學(xué)者們研究了非線性PI控制[1-2]、滑模控制[3-4]、模糊控制[5-6]、神經(jīng)網(wǎng)絡(luò)控制[7]等現(xiàn)代控制算法,但這些控制策略存在系統(tǒng)抖振或算法較復(fù)雜等問(wèn)題,因此需要研究更簡(jiǎn)單的控制方法。
反步控制理論在永磁伺服控制系統(tǒng)的應(yīng)用引起了廣泛的關(guān)注[8-12]。其根據(jù)系統(tǒng)控制目標(biāo),基于狀態(tài)方程來(lái)反推出系統(tǒng)的輸入,設(shè)計(jì)過(guò)程簡(jiǎn)單,且能保證系統(tǒng)的全局穩(wěn)定性。文獻(xiàn)[8]基于反步法設(shè)計(jì)控制器,與PI控制相比減少了調(diào)節(jié)參數(shù)數(shù)目,只需調(diào)節(jié)3個(gè)參數(shù),其本質(zhì)是保留了比例調(diào)節(jié)器而取消積分調(diào)節(jié)器,系統(tǒng)參數(shù)已知且不變時(shí)通過(guò)精確的靜態(tài)補(bǔ)償實(shí)現(xiàn)狀態(tài)的無(wú)靜差跟蹤,具有較快的動(dòng)態(tài)響應(yīng)。
然而伺服系統(tǒng)經(jīng)常運(yùn)行于復(fù)雜的工況,系統(tǒng)參數(shù)經(jīng)常發(fā)生變化,此時(shí)反步控制器會(huì)出現(xiàn)較大的穩(wěn)態(tài)誤差和動(dòng)態(tài)誤差,因此必須對(duì)未知參數(shù)進(jìn)行準(zhǔn)確地在線估計(jì),與自適應(yīng)控制相結(jié)合實(shí)現(xiàn)更好的參數(shù)魯棒性。目前已有文獻(xiàn)對(duì)系統(tǒng)參數(shù)進(jìn)行辨識(shí)實(shí)現(xiàn)自適應(yīng)反步控制。文獻(xiàn)[13]對(duì)定子電阻和負(fù)載轉(zhuǎn)矩進(jìn)行辨識(shí)來(lái)提高系統(tǒng)抗干擾能力。文獻(xiàn)[14]對(duì)負(fù)載轉(zhuǎn)矩及粘滯摩擦因數(shù)實(shí)時(shí)辨識(shí),為低速性能的改善提供了新的解決方法。文獻(xiàn)[15]對(duì)電阻、負(fù)載轉(zhuǎn)矩及摩擦因數(shù)進(jìn)行準(zhǔn)確辨識(shí),更好地抑制參數(shù)變化對(duì)速度跟蹤性能的影響。可見(jiàn)已有的反步文獻(xiàn)主要對(duì)定子電阻、負(fù)載轉(zhuǎn)矩及粘滯摩擦因數(shù)進(jìn)行自適應(yīng)辨識(shí),考慮轉(zhuǎn)動(dòng)慣量變化對(duì)轉(zhuǎn)速跟蹤性能影響的文獻(xiàn)很少。文獻(xiàn)[16]設(shè)計(jì)了轉(zhuǎn)動(dòng)慣量和負(fù)載轉(zhuǎn)矩自適應(yīng)反步控制器,但設(shè)計(jì)過(guò)程中忽略了粘滯摩擦因數(shù)的影響,導(dǎo)致粘滯摩擦因數(shù)較大的伺服系統(tǒng)的參數(shù)辨識(shí)不穩(wěn)定,影響轉(zhuǎn)速跟蹤性能。
本文同時(shí)考慮了影響伺服系統(tǒng)轉(zhuǎn)速環(huán)跟蹤性能的轉(zhuǎn)動(dòng)慣量、負(fù)載轉(zhuǎn)矩及粘滯摩擦因數(shù)的變化,對(duì)三個(gè)參數(shù)同時(shí)辨識(shí),實(shí)現(xiàn)自適應(yīng)反步控制。首先給出了傳統(tǒng)自適應(yīng)反步控制器設(shè)計(jì)過(guò)程,分析了傳統(tǒng)自適應(yīng)反步未辨識(shí)摩擦因數(shù)對(duì)辨識(shí)結(jié)果的影響;接著推導(dǎo)了實(shí)時(shí)辨識(shí)粘滯摩擦因數(shù)的自適應(yīng)反步控制器;最后在dSPACE公司的DS1103系統(tǒng)試驗(yàn)平臺(tái)上對(duì)本文所提方法進(jìn)行試驗(yàn)驗(yàn)證,試驗(yàn)結(jié)果表明了參數(shù)辨識(shí)準(zhǔn)確、收斂速度快,說(shuō)明系統(tǒng)具有良好的參數(shù)魯棒性和轉(zhuǎn)速跟蹤性能。
1 PMSM數(shù)學(xué)模型
本文以交流伺服系統(tǒng)中通常采用的表貼式PMSM為研究對(duì)象。PMSM在轉(zhuǎn)子磁場(chǎng)定向的同步旋轉(zhuǎn)坐標(biāo)系下的機(jī)械運(yùn)動(dòng)方程為
(1)
定子電壓方程為
(2)

式中:J——系統(tǒng)的轉(zhuǎn)動(dòng)慣量,kg·m2;
B——系統(tǒng)的粘滯摩擦因數(shù),N·m·s/rad;
TL——負(fù)載轉(zhuǎn)矩,N·m;
Ω——機(jī)械角速度,rad/s;
Kt——轉(zhuǎn)矩常數(shù),N·m/A;
id、iq——d、q軸電流,A;
ud、uq——d、q軸電壓,V;
pn——電機(jī)極對(duì)數(shù);
ψf——永磁磁鏈,Wb;
R——定子電阻,Ω;
L——定子電感,H。
2 系統(tǒng)控制器設(shè)計(jì)
2. 1 傳統(tǒng)的自適應(yīng)反步控制器設(shè)計(jì)
永磁伺服系統(tǒng)的控制目標(biāo)是速度跟蹤,定義角速度跟蹤誤差e=Ω*-Ω,則跟蹤誤差狀態(tài)方程為
(4)
取如下正定函數(shù)
(5)
對(duì)式(5)求導(dǎo)并令
(6)
式(6)表明,令de/dt=-ke(k>0)即可使系統(tǒng)漸近穩(wěn)定,結(jié)合式(4)可得轉(zhuǎn)速環(huán)的控制量為
(7)
為實(shí)現(xiàn)電流跟蹤,定義iq和id的跟蹤誤差分別為eq=iq*-iq、ed=id*-id,電流跟蹤誤差的狀態(tài)方程為
(8)
取如下正定函數(shù)
(9)
求導(dǎo)可得
(10)
令deq/dt=-k1eq、ded/dt=-k2ed(k1>0,k2>0)即可使系統(tǒng)漸近穩(wěn)定,于是可得電流環(huán)的控制量ud、uq為
(11)

(12)

(13)
將式(7)中的參數(shù)J和TL分別用其估計(jì)值代替,則系統(tǒng)實(shí)際控制量為
(14)
將式(14)代入式(4)可得
(15)
取如下正定函數(shù)
(a>0,b>0)(16)
對(duì)式(16)求導(dǎo)可得
(17)
考慮到J及其估計(jì)值均始終為正數(shù),因此式中的第一項(xiàng)始終是負(fù)數(shù),只要令后兩項(xiàng)為零,則可保證系統(tǒng)漸近收斂,于是參數(shù)的自適應(yīng)律為
(18)
可得轉(zhuǎn)動(dòng)慣量和負(fù)載轉(zhuǎn)矩的辨識(shí)公式為
(19)

由式(14)和式(19)可得傳統(tǒng)自適應(yīng)反步轉(zhuǎn)速控制器結(jié)構(gòu)框圖如圖1所示。轉(zhuǎn)動(dòng)慣量及負(fù)載轉(zhuǎn)矩初始值在積分器中設(shè)置。參數(shù)k影響轉(zhuǎn)速的跟蹤性能,k越大,轉(zhuǎn)速跟蹤性能越好,但k不能無(wú)限增大,否則會(huì)導(dǎo)致噪聲太大。自適應(yīng)參數(shù)a、b取值太小容易導(dǎo)致參數(shù)辨識(shí)收斂速度慢,而取值太大則會(huì)使辨識(shí)結(jié)果振蕩不收斂,需根據(jù)系統(tǒng)實(shí)際情況選取。
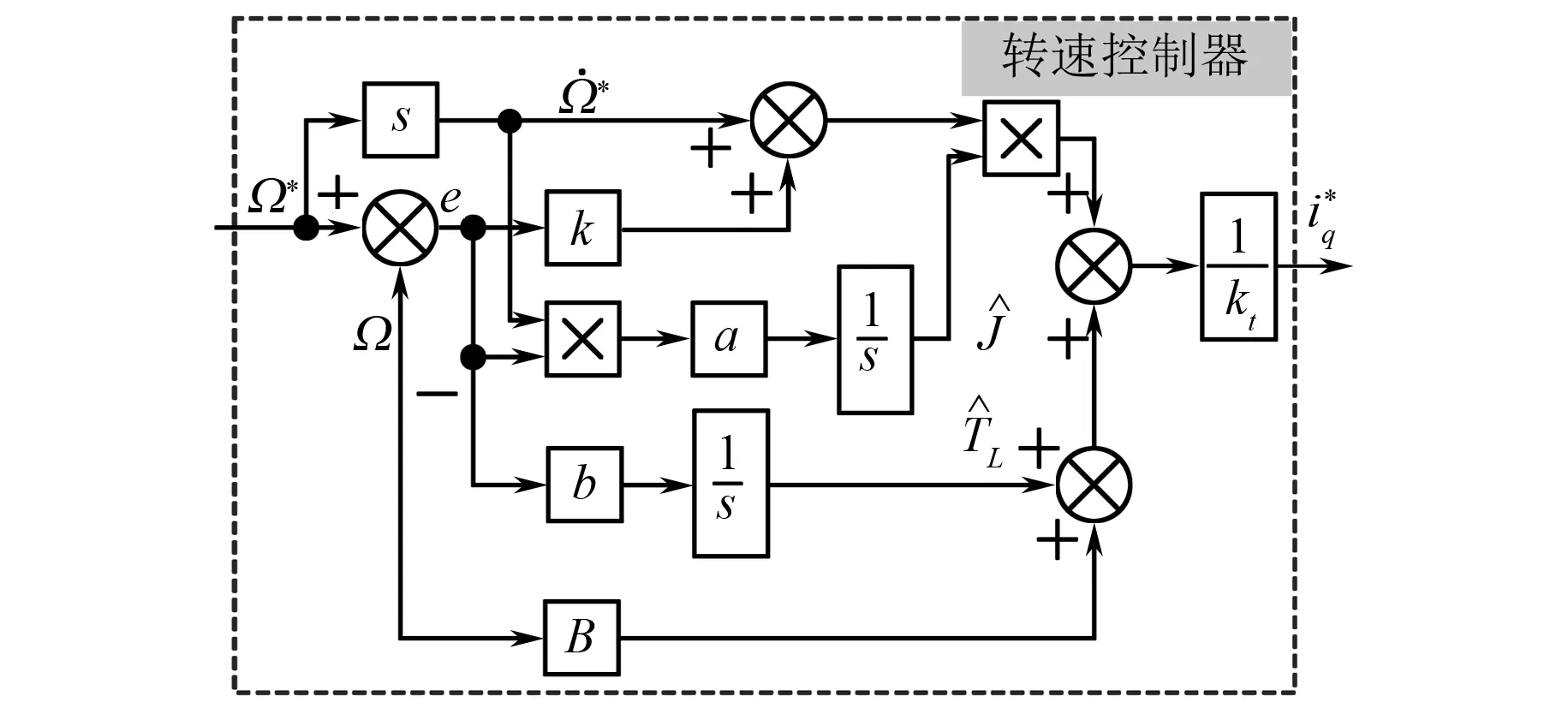
圖1 傳統(tǒng)的自適應(yīng)反步轉(zhuǎn)速控制器結(jié)構(gòu)框圖
此外,由電機(jī)運(yùn)動(dòng)方程可知,轉(zhuǎn)動(dòng)慣量J與角速度變化率d/dt以乘積的形式存在,只有角速度變化率不為零時(shí)才能辨識(shí)出J,因此試驗(yàn)中給定正弦轉(zhuǎn)速。
2. 2 傳統(tǒng)自適應(yīng)反步控制器存在的問(wèn)題
傳統(tǒng)的自適應(yīng)反步控制器把粘滯摩擦因數(shù)當(dāng)成已知且不變,但實(shí)際伺服系統(tǒng)中粘滯摩擦因數(shù)B往往未知且容易發(fā)生變化,導(dǎo)致傳統(tǒng)自適應(yīng)反步轉(zhuǎn)速控制器跟實(shí)際電機(jī)模型之間存在一個(gè)與摩擦力矩BΩ有關(guān)的誤差。從式(19)的辨識(shí)公式來(lái)看,轉(zhuǎn)動(dòng)慣量和負(fù)載轉(zhuǎn)矩辨識(shí)結(jié)果與模型誤差有關(guān)。若系統(tǒng)粘滯摩擦因數(shù)較小則不會(huì)對(duì)辨識(shí)結(jié)果產(chǎn)生太大影響,但對(duì)于存在較大粘滯摩擦因數(shù)的伺服系統(tǒng)來(lái)說(shuō),未實(shí)時(shí)辨識(shí)粘滯摩擦因數(shù)的傳統(tǒng)自適應(yīng)反步轉(zhuǎn)速控制器受摩擦項(xiàng)BΩ影響,導(dǎo)致辨識(shí)結(jié)果隨速度變化而變化。試驗(yàn)中轉(zhuǎn)速給定為正弦信號(hào),導(dǎo)致轉(zhuǎn)動(dòng)慣量、負(fù)載轉(zhuǎn)矩辨識(shí)結(jié)果產(chǎn)生較大的波動(dòng),影響轉(zhuǎn)速跟蹤性能。
3 實(shí)時(shí)辨識(shí)粘滯摩擦因數(shù)的控制器設(shè)計(jì)


(20)
將式(7)中的參數(shù)J、TL和B分別用其估計(jì)值代替,可得系統(tǒng)實(shí)際控制量為
(21)
將式(21)代入式(4)可得
(22)
取正定函數(shù)
求導(dǎo)可得
顯然式中的第一項(xiàng)始終是個(gè)負(fù)數(shù),因此只要令后三項(xiàng)為零,即可保證系統(tǒng)漸近收斂,于是有
(25)
可得出轉(zhuǎn)動(dòng)慣量、負(fù)載轉(zhuǎn)矩和粘滯摩擦因數(shù)辨識(shí)公式為
(26)

由式(26)可得實(shí)時(shí)辨識(shí)粘滯摩擦因數(shù)的控制器結(jié)構(gòu)框圖如圖2所示。自適應(yīng)參數(shù)c跟參數(shù)a、b取值原則一樣,根據(jù)系統(tǒng)實(shí)際情況選取。
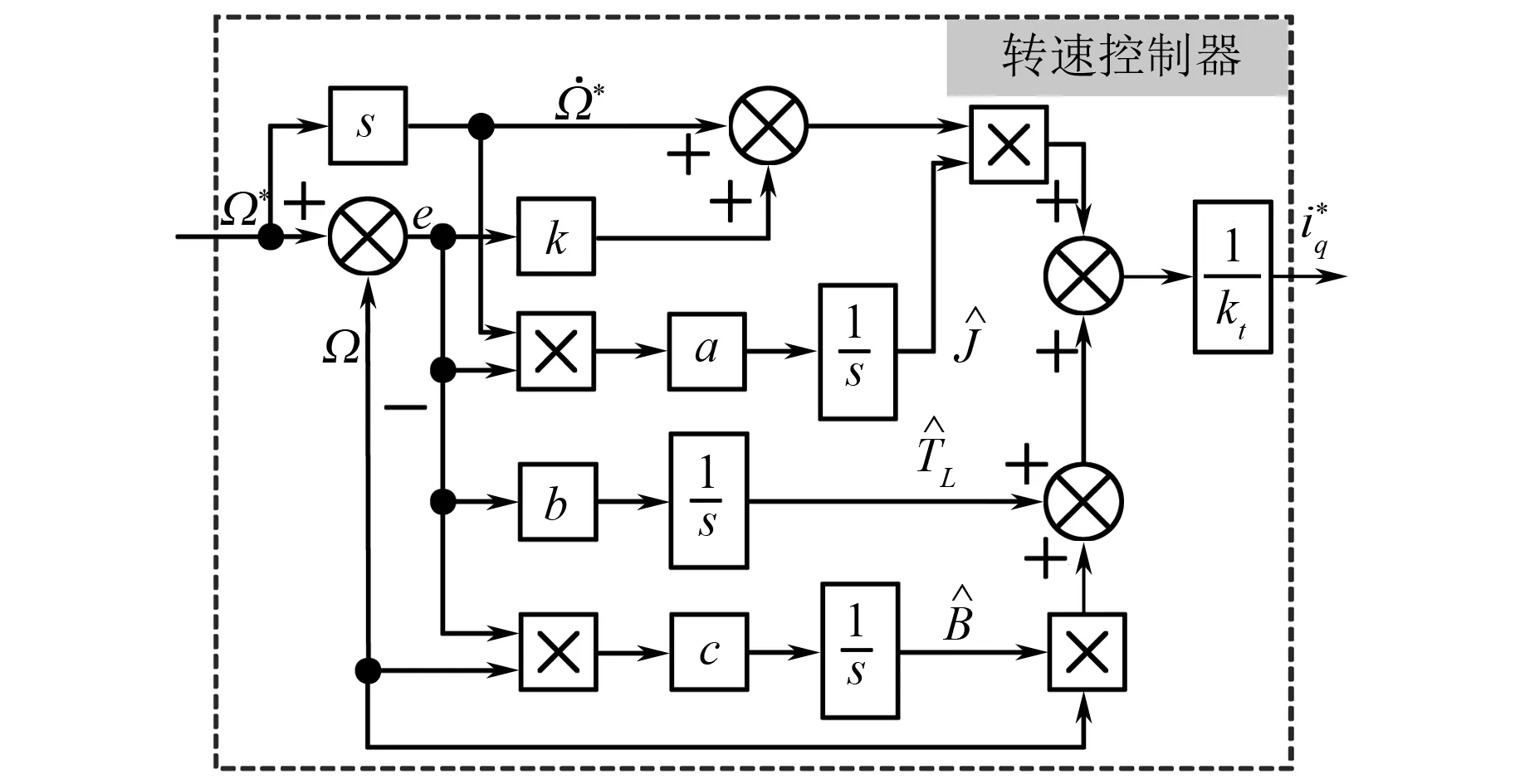
圖2 實(shí)時(shí)辨識(shí)粘滯摩擦因數(shù)的控制器結(jié)構(gòu)框圖
4 試驗(yàn)驗(yàn)證
為驗(yàn)證本文方法的有效性,對(duì)PMSM伺服系統(tǒng)進(jìn)行試驗(yàn)驗(yàn)證,所用PMSM參數(shù)如表1所示。
表1 電機(jī)參數(shù)
試驗(yàn)平臺(tái)如圖3所示。試驗(yàn)平臺(tái)基于dSPACE公司實(shí)時(shí)仿真系統(tǒng)DS1103,逆變器開(kāi)關(guān)頻率為10 kHz,轉(zhuǎn)速環(huán)和電流環(huán)采樣周期及系統(tǒng)的計(jì)算步長(zhǎng)均為0.1 ms。試驗(yàn)平臺(tái)主要由DS1103、控制板、PMSM、聯(lián)軸器及負(fù)載電機(jī)構(gòu)成。試驗(yàn)系統(tǒng)存在較大的粘滯摩擦因數(shù)。由于電機(jī)按正弦轉(zhuǎn)速給定,轉(zhuǎn)速時(shí)刻在變化,不便于對(duì)系統(tǒng)施加額外的負(fù)載轉(zhuǎn)矩,故試驗(yàn)中的負(fù)載轉(zhuǎn)矩只由負(fù)載電機(jī)摩擦產(chǎn)生。
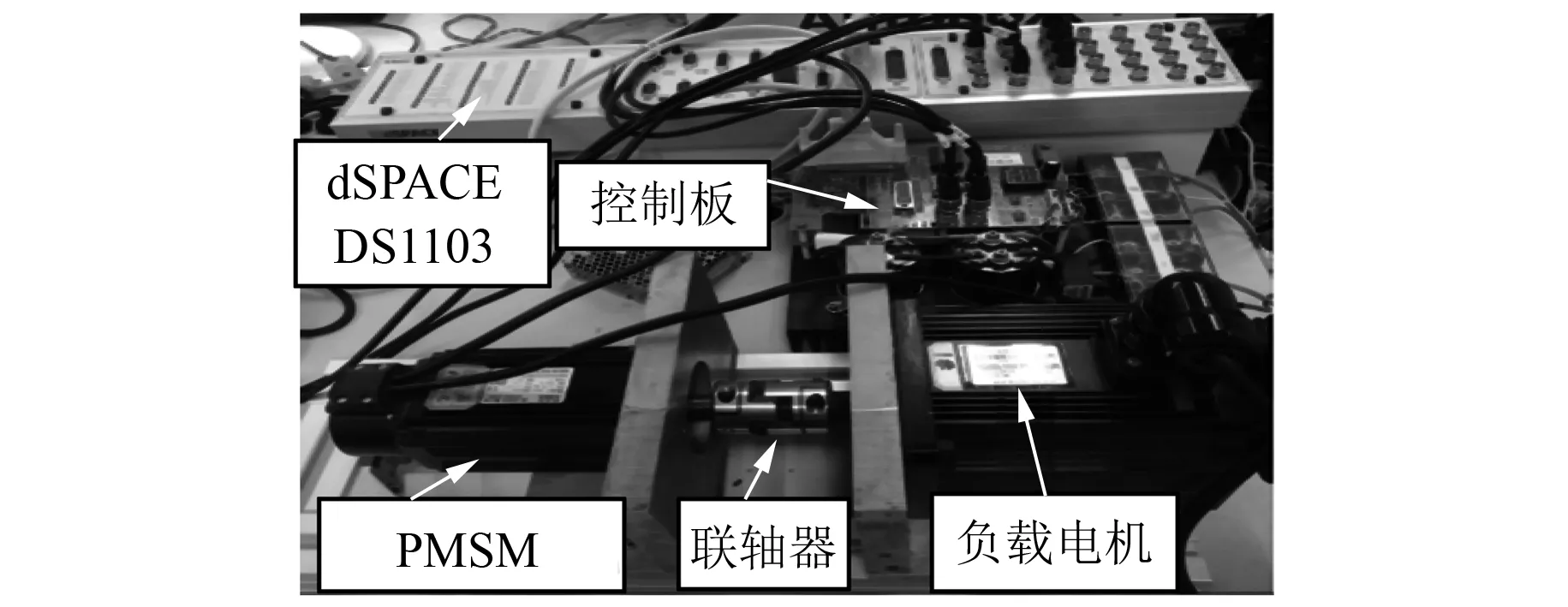
圖3 試驗(yàn)平臺(tái)
4. 1 傳統(tǒng)自適應(yīng)反步控制器的試驗(yàn)驗(yàn)證
給定轉(zhuǎn)速為500 r·min-1/5 Hz的正弦信號(hào),控制器參數(shù)設(shè)置k=80、a=1×10-6、b=1。轉(zhuǎn)動(dòng)慣量初值Jest(0)分別為1 g·m2和3 g·m2時(shí)的試驗(yàn)結(jié)果如圖4所示。由圖4的(a)、(b)可看出轉(zhuǎn)動(dòng)慣量辨識(shí)值在1.6~2.0 g·m2范圍內(nèi)波動(dòng),負(fù)載轉(zhuǎn)矩估計(jì)值在-0.2~0.2 N·m內(nèi)波動(dòng),辨識(shí)結(jié)果不準(zhǔn)確,有明顯的波動(dòng),驗(yàn)證了傳統(tǒng)的自適應(yīng)反步存在問(wèn)題的理論分析的正確性。由圖4的(c)、(d)可看出由于參數(shù)辨識(shí)值不準(zhǔn)確,導(dǎo)致轉(zhuǎn)速跟蹤誤差較大,為±40 r·min-1。
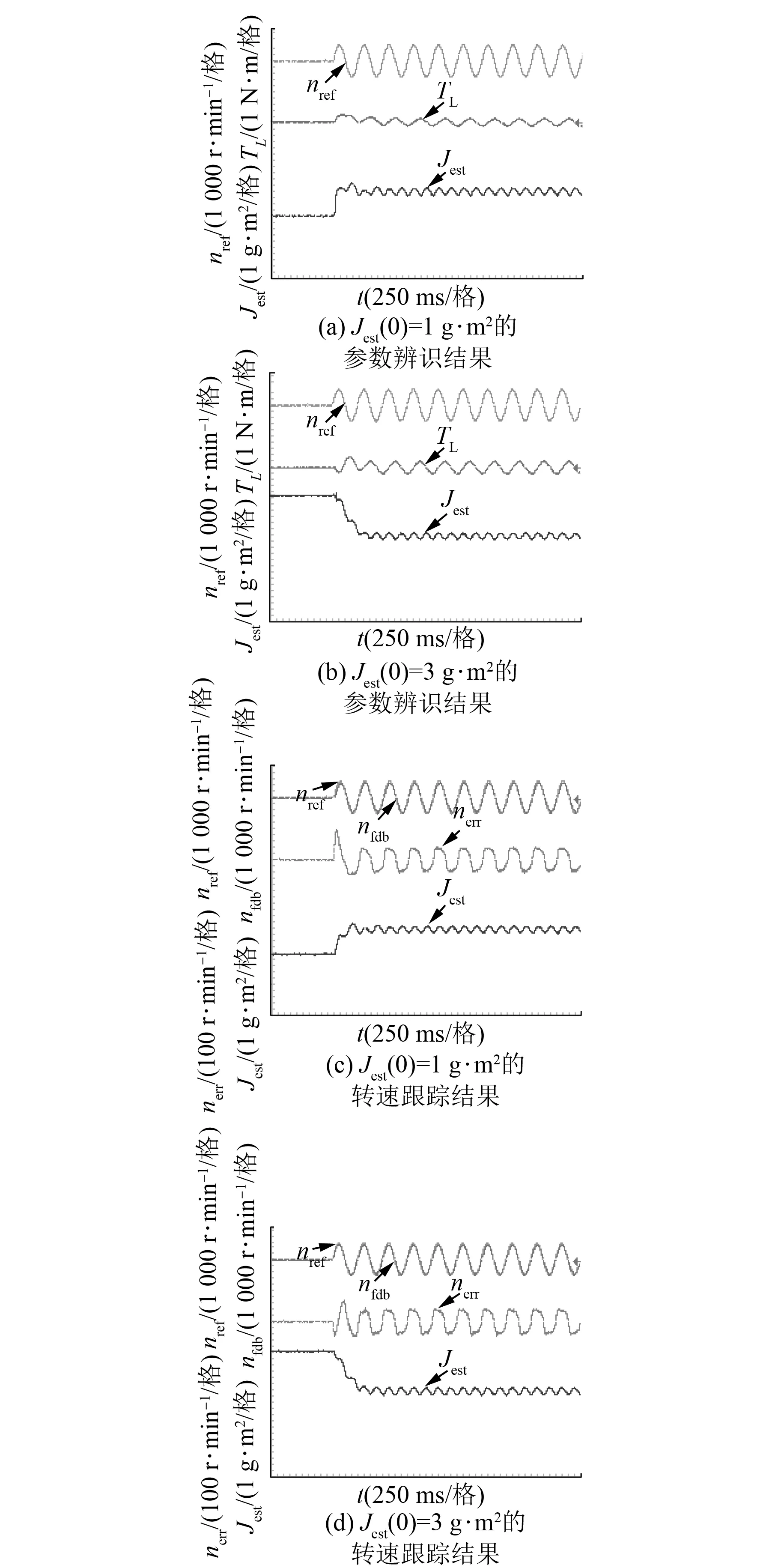
圖4 傳統(tǒng)自適應(yīng)反步控制器的試驗(yàn)結(jié)果
4. 2 實(shí)時(shí)辨識(shí)粘滯摩擦因數(shù)控制器的試驗(yàn)驗(yàn)證
給定500 r·min-1/5 Hz的正弦轉(zhuǎn)速,控制器參數(shù)設(shè)置k=80、a=1×10-6、b=1、c=0.000 5。轉(zhuǎn)動(dòng)慣量初值Jest(0)分別為1 g·m2和3 g·m2時(shí)的試驗(yàn)結(jié)果如圖5所示。由圖5的(a)、(b)可看出無(wú)論估計(jì)轉(zhuǎn)動(dòng)慣量初值大于或小于真實(shí)慣量值,慣量辨識(shí)值均穩(wěn)定收斂至1.8 g·m2,慣量初值為3 g·m2時(shí)經(jīng)過(guò)兩個(gè)周期0.4 s,慣量即可收斂至真實(shí)值;慣量初值為1 g·m2時(shí)收斂速度更快,經(jīng)過(guò)一個(gè)周期0.2 s即可穩(wěn)定至真實(shí)值,負(fù)載轉(zhuǎn)矩辨識(shí)值為0,粘滯摩擦因數(shù)經(jīng)過(guò)0.5 s即可得到辨識(shí)值為0.012 N·m·s·rad-1。由圖5的(c)、(d)可看出轉(zhuǎn)動(dòng)慣量在達(dá)到真實(shí)值前轉(zhuǎn)速跟蹤誤差較大,一旦慣量收斂至真實(shí)值,那么轉(zhuǎn)速跟蹤誤差則從±100 r·min-1減小到±10 r·min-1。
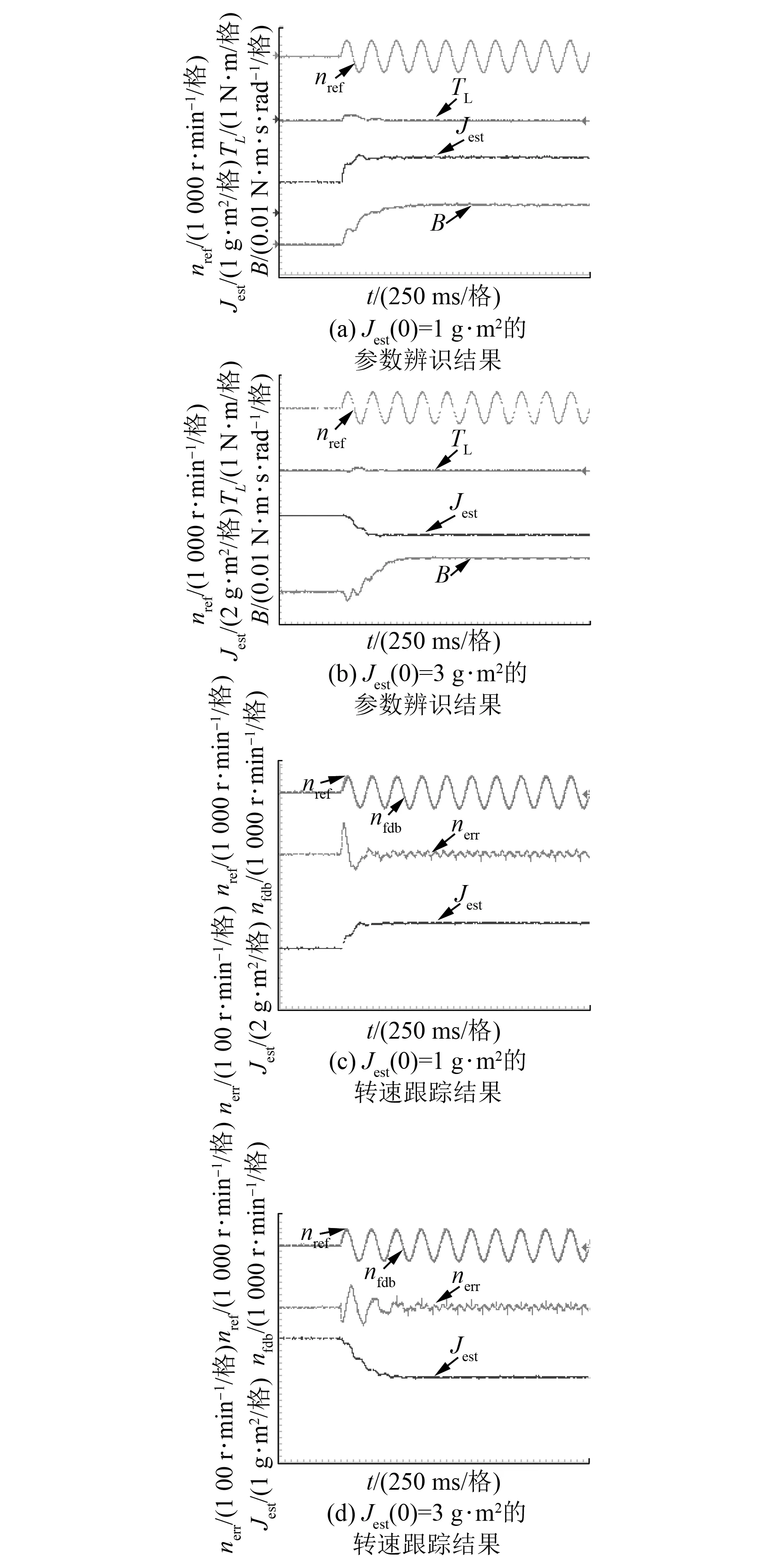
圖5 跟蹤500 r·min-1/5 Hz正弦轉(zhuǎn)速的試驗(yàn)結(jié)果
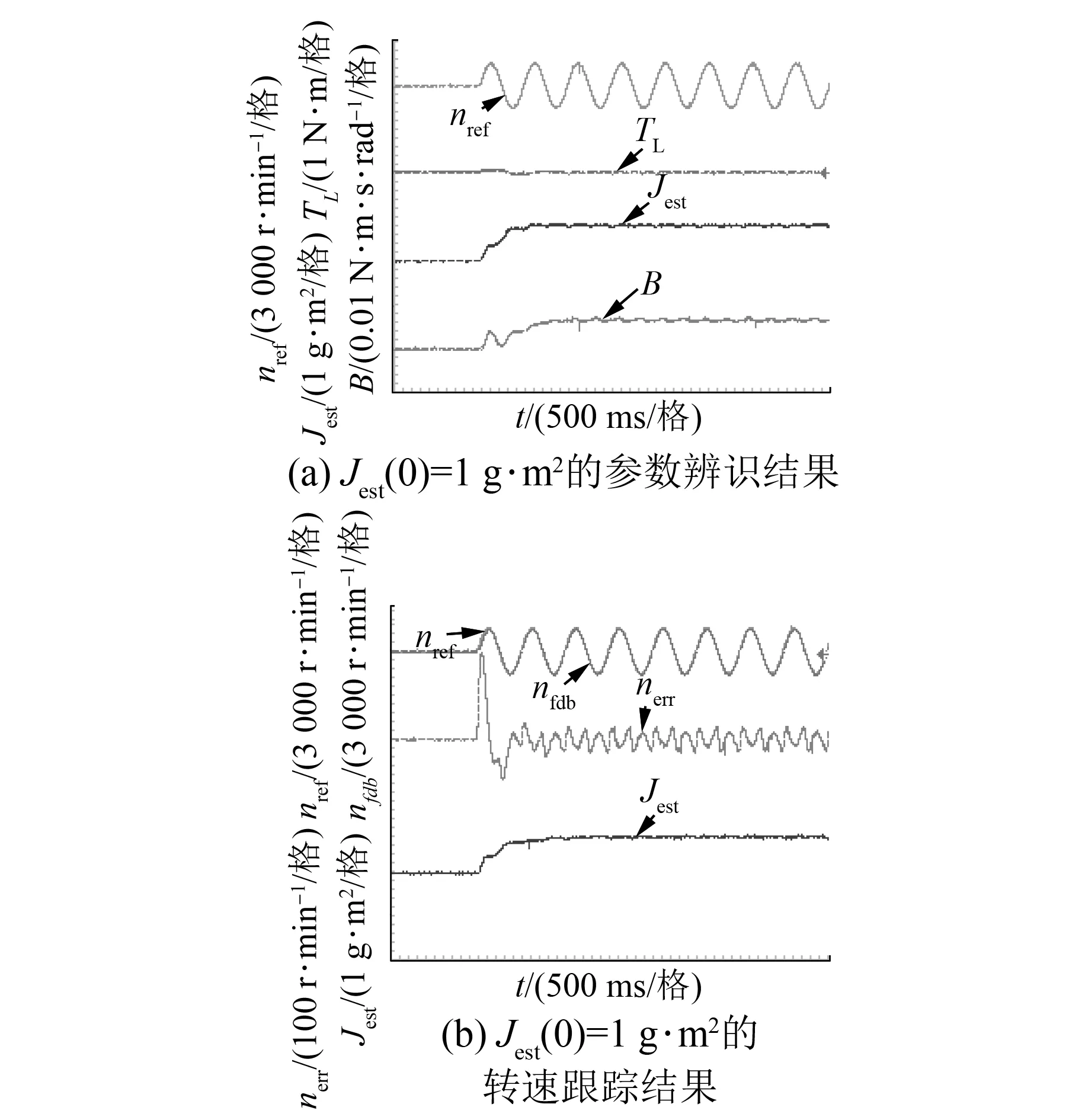
圖6 跟蹤1 500 r·min-1/2 Hz正弦轉(zhuǎn)速的試驗(yàn)結(jié)果
改變電機(jī)轉(zhuǎn)速為1 500 r·min-1/2 Hz,k=80、a=2×10-7、b=0.5、c=5×10-5。慣量初值Jest(0)為1 g·m2的試驗(yàn)結(jié)果如圖6所示。可看出只需經(jīng)過(guò)一個(gè)周期0.5 s,慣量即可收斂至1.8 g·m2,負(fù)載辨識(shí)值穩(wěn)定至0,粘滯摩擦因數(shù)經(jīng)過(guò)1 s可收斂至0.006 N·m·s·rad-1。一旦慣量收斂至真實(shí)值,轉(zhuǎn)速跟蹤誤差減小到±20 r·min-1。
圖5和圖6表明,本文所提算法能在不同轉(zhuǎn)速幅值及頻率和不同初始慣量值同時(shí)實(shí)現(xiàn)轉(zhuǎn)動(dòng)慣量、負(fù)載轉(zhuǎn)矩和粘滯摩擦因數(shù)的準(zhǔn)確辨識(shí),且轉(zhuǎn)速跟蹤誤差小,驗(yàn)證了本文設(shè)計(jì)方法的正確性和有效性。
讓電機(jī)以恒定轉(zhuǎn)速運(yùn)行,空載測(cè)量q軸電流值,以轉(zhuǎn)速n為橫坐標(biāo),轉(zhuǎn)矩Te為縱坐標(biāo),可得圖7所示的轉(zhuǎn)矩-轉(zhuǎn)速曲線,曲線斜率即為粘滯摩擦因數(shù)。粘滯摩擦因數(shù)與轉(zhuǎn)速關(guān)系曲線如圖8所示。
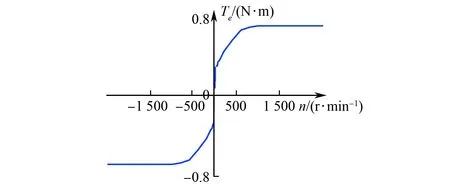
圖7 轉(zhuǎn)矩-轉(zhuǎn)速曲線
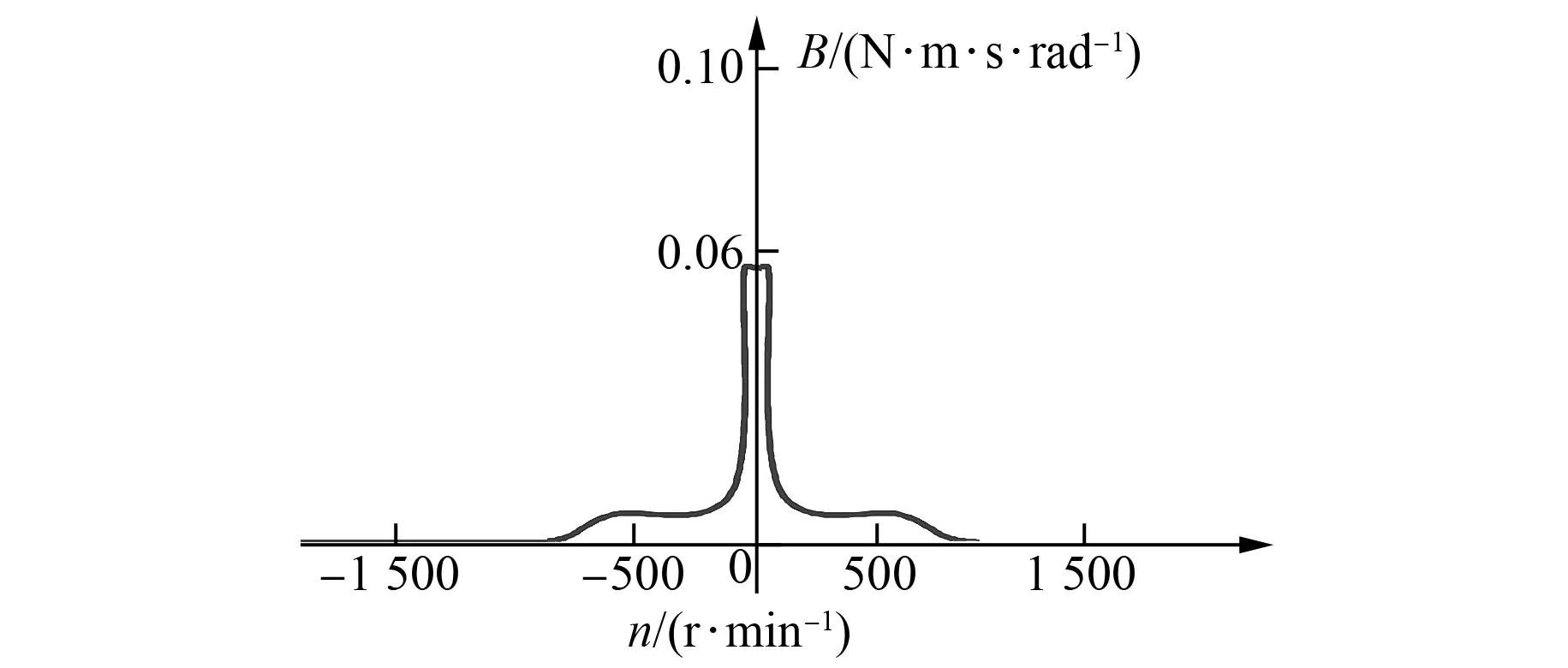
圖8 粘滯摩擦因數(shù)-轉(zhuǎn)速曲線
從圖7和圖8可明顯看出粘滯摩擦因數(shù)隨轉(zhuǎn)速不同而變化,轉(zhuǎn)速越大粘滯摩擦因數(shù)越小。試驗(yàn)辨識(shí)的粘滯摩擦因數(shù)為平均值,與給定正弦轉(zhuǎn)速的幅值有關(guān)。從圖8可看出1 500 r·min-1的粘滯摩擦因數(shù)平均值比500 r·min-1的粘滯摩擦因數(shù)平均值小,驗(yàn)證了圖6的粘滯摩擦因數(shù)辨識(shí)結(jié)果比圖5辨識(shí)值小。
5 結(jié) 語(yǔ)
大摩擦因數(shù)的伺服系統(tǒng)參數(shù)辨識(shí)結(jié)果不準(zhǔn)確,轉(zhuǎn)速跟蹤誤差較大。本文設(shè)計(jì)了一種同時(shí)辨識(shí)粘滯摩擦因數(shù)、轉(zhuǎn)動(dòng)慣量和負(fù)載轉(zhuǎn)矩的自適應(yīng)反步轉(zhuǎn)速控制器,有效減小了轉(zhuǎn)速跟蹤誤差。該方法結(jié)構(gòu)簡(jiǎn)單,易于實(shí)現(xiàn)。試驗(yàn)結(jié)果表明系統(tǒng)的參數(shù)辨識(shí)值準(zhǔn)確穩(wěn)定、1 s以內(nèi)即可收斂至真實(shí)值,辨識(shí)速度快、精度高,具有良好的轉(zhuǎn)速跟蹤性能和參數(shù)魯棒性。
[1] 王江,王靜,費(fèi)向陽(yáng).永磁同步電動(dòng)機(jī)的非線性PI速度控制[J].中國(guó)電機(jī)工程學(xué)報(bào),2005,25(7): 125-130.
[2] 王瑞萍,皮佑國(guó).基于分?jǐn)?shù)階PI速度控制器的永磁同步電動(dòng)機(jī)控制[J].電工技術(shù)學(xué)報(bào),2012,27(11): 69-75.
[3] 黃慶,黃守道,馮垚徑,等.基于變結(jié)構(gòu)自抗擾的永磁電動(dòng)機(jī)速度控制系統(tǒng)[J].電工技術(shù)學(xué)報(bào),2015,30(20): 31-39.
[4] 張曉光,趙克,孫力,等.永磁同步電動(dòng)機(jī)滑模變結(jié)構(gòu)調(diào)速系統(tǒng)新型趨近率控制[J].中國(guó)電機(jī)工程學(xué)報(bào),2011,31(24): 77-82.
[5] 劉棟良,崔言飛,趙曉丹,等.基于反推控制的永磁同步電動(dòng)機(jī)速度的模糊控制[J].電工技術(shù)學(xué)報(bào),2014,29(11): 38-44.
[6] LI S, GU H. Fuzzy adaptive internal model control schemes for PMSM speed-regulation system[J].IEEE Transactions on Industrial Informatics,2012,8(4): 767-779.
[7] 王同旭,馬鴻雁,聶沐晗.電梯用永磁同步電機(jī)BP神經(jīng)網(wǎng)絡(luò)PID調(diào)速控制方法的研究[J].電工技術(shù)學(xué)報(bào),2015,30(S1): 43-47.
[8] 王家軍,趙光宙,齊冬蓮.反推式控制在永磁同步電動(dòng)機(jī)速度跟蹤控制中的應(yīng)用[J].中國(guó)電機(jī)工程學(xué)報(bào),2004,24(8): 95-98.
[9] 劉棟良,鄭謝輝,崔麗麗.無(wú)速度傳感器永磁同步電機(jī)反推控制[J].電工技術(shù)學(xué)報(bào),2011,26(9): 67-72.
[10] 付培華,陳振,叢炳龍,等.基于反步自適應(yīng)滑模控制的永磁同步電機(jī)位置伺服系統(tǒng)[J].電工技術(shù)學(xué)報(bào),2013,28(9): 288-293,301.
[11] 徐艷平,雷亞洲,馬靈芝,等.基于反推控制的永磁同步電機(jī)新型直接轉(zhuǎn)矩控制方法[J].電工技術(shù)學(xué)報(bào),2015,30(10): 83-89.
[12] TING C, CHANG Y, SHI B, et al. Adaptive backstepping control for permanent magnet linear synchronous motor servo drive[J].IET Electr Power Appl,2015,9(3): 265-279.
[13] 劉棟良,王家軍,崔麗麗.永磁同步電機(jī)參數(shù)自適應(yīng)調(diào)速控制[J].電工技術(shù)學(xué)報(bào),2011,26(8): 159-165.
[14] 郭閻彥,劉銳,史婷娜,等.基于反推自適應(yīng)控制的永磁同步電機(jī)摩擦力矩補(bǔ)償策略[J].中國(guó)電機(jī)工程學(xué)報(bào),2013,33(33): 76-84.
[15] ZHOU J, WANG Y. Adaptive backstepping speed controller design for a permanent magnet synchronousmotor[J].IEE Proceedings-Electric Power Applications,2002,149(2): 165-172.
[16] 范仁凱.直接驅(qū)動(dòng)永磁同步電機(jī)的轉(zhuǎn)速跟蹤控制[D].南京: 南京航空航天大學(xué),2013.
AdaptiveBacksteppingControlofPermanentMagnetServoSystemwithLargeViscousCoefficient*
WUJing,ZHUXiaoyong,ZUOYuefei,ZHANGChao,QUANLi
(School of Electrical and Information Engineering, Jiangsu University, Zhenjiang 212013, China)
For permanent magnet servo system with large coefficient of viscous friction, traditional adaptive backstepping control could result in fluctuated and unstable identification results and poor performance of speed tracking. Adaptive backstepping controller identifying viscous friction coefficient was proposed, which was used to estimate the inertia, load torque and viscous friction coefficient simultaneously, improved parameter identification accuracy. The method proposed in this paper had merits of simple structure and usability. The validity and accuracy were verified by experiments based on the platform using dSPACE DS1103 system.
permanentmagnetsynchronousmotor(PMSM);viscousfrictioncoefficient;adaptivebacksteppingcontrol;inertia
國(guó)家自然科學(xué)基金項(xiàng)目(51477069);國(guó)家自然科學(xué)基金項(xiàng)目(51377073)
吳 晶(1992—),女,碩士研究生,研究方向?yàn)橛来磐诫姍C(jī)的參數(shù)辨識(shí)。
朱孝勇(1975—),男,博士生導(dǎo)師,教授,研究方向?yàn)殡妱?dòng)汽車驅(qū)動(dòng)控制技術(shù)、新型電機(jī)設(shè)計(jì)與控制等。
TM 301.2
A
1673-6540(2017)12- 0030- 06
2017 -02 -24
