基于銅耗最小的五相永磁同步電機單相斷路故障解耦容錯控制*
2018-01-05 04:39:17趙美玲朱孝勇
電機與控制應用 2017年12期
趙美玲, 全 力, 張 超, 朱孝勇
(江蘇大學 電氣信息工程學院,江蘇 鎮江 212013)
基于銅耗最小的五相永磁同步電機單相斷路故障解耦容錯控制*
趙美玲, 全 力, 張 超, 朱孝勇
(江蘇大學 電氣信息工程學院,江蘇 鎮江 212013)
為提高五相永磁同步電機故障狀態下的轉矩性能,提出了一種基于銅耗最小的解耦容錯控制方法。在磁動勢不變原理與銅耗最小原則的基礎上,求解出故障后電機的容錯電流,然后根據所求得的補償電流,推導出電機缺相后的降維變換矩陣,從而建立故障后五相永磁同步電機的數學模型,實現故障后電機的解耦控制。采用聯合仿真的方法來驗證所提出的容錯控制算法。仿真結果表明,缺相后電機的轉矩脈動得到了有效的降低,實現了電機的無擾容錯運行。
五相永磁同步電機;開路故障;銅耗;解耦;容錯控制
0 引 言
電機驅動系統中常見的故障可分為電機繞組故障和逆變器故障,每一類又存在開路和短路故障[1]。發生短路故障時,可以通過硬件故障隔離的方法轉換為電機缺相運行[2]。相比于三相電機,多相電機擁有更多的控制自由度,多出的自由度可用來實現電機無擾容錯運行[3-5]。這已經成為國內外的研究熱點。
目前國內外研究學者提出了多種容錯控制算法,大體可以分為兩大類:第一類是容錯電流的優化控制。基于故障前后磁動勢不變原理,通過對剩余相電流的幅值和相位的控制,對故障后的繞組電流進行補償,從而實現了缺相后電機的平穩運行[6-7]。但是這種方法沒有建立電機缺相后的數學模型,因而只能采用電流滯環控制;然而電流滯環控制會導致開關頻率不固定,開關損耗增加,諧波含量增多,轉矩脈動變大等問題。第二類是采用故障后電機的磁場定向控制方法。Zhao Y等[8-9]建立了六相感應電機在缺相故障下的解耦變換數學模型,實現了電機的矢量控制。然而,這種方法需要處理電機模型在發生故障后的非對稱性。文獻[10]建立了解耦反變換矩陣,并研究了奇數次諧波分量對基波轉矩電流分量產生的影響,從而提出了三次諧波注入的容錯控制策略。但是這種方法只適用于反電勢中富含三次諧波分量的電機。文獻[11]以非對稱的雙三相永磁同步電機為研究對象,構建的解耦變換矩陣可以使電機同時適用于正常運行狀態和容錯運行狀態,從而簡化了容錯控制策略。然而,這種方法只適用于雙三相電機。文獻[12]通過解耦變換和故障前后電機磁動勢不變原理,推導出了故障后電機的降維變換矩陣,進一步降低了容錯控制的復雜性,可是這種方法只是考慮了幅值相等的約束條件,并沒有考慮到電機性能的其他因素。
本文以五相永磁同步電機(Five-Phase Permanent Magnet Synchronous Motor,FPMSM)為研究對象,對一相繞組開路故障進行研究。在磁動勢不變原理與銅耗最小約束條件的基礎上求解出故障后相電流的表達式,從而在氣隙中形成了圓形旋轉磁動勢,保證電機缺相后的平穩運行。推導了FPMSM發生故障后的正交降維變換矩陣,通過解耦變換矩陣使缺相后的電機電感、磁鏈矩陣對角化,從而實現了勵磁電流分量和轉矩電流分量的解耦控制。在矢量控制中,與轉矩相關的零序電流分量可以通過傳統的PI控制器控制為零,因而降低了轉矩脈動以及電流諧波含量。本文的方法能夠在電機發生故障后,實現電機控制的完全解耦,降低了系統的復雜性。同時,在降低電機轉矩脈動的條件下,實現電機繞組銅耗最小化,實現電機高效率、高性能運行。最后,構建FPMSM聯合仿真的模型,對本文所提出的單相開路故障下容錯控制系統的先進性和有效性進行驗證。
1 電機結構及控制策略
圖1是本文研究的20/36極的FPMSM示意圖。采用分數槽集中式繞組,保證了各相之間磁路的獨立性,因此增強了電機的容錯性能。FPMSM運行時,損耗主要包括電機銅耗和永磁體的渦流損耗。永磁體的渦流損耗可以通過優化電機結構的方法降低,而電機銅耗可以通過運行時的控制降低。本文圍繞銅耗最小進行研究。
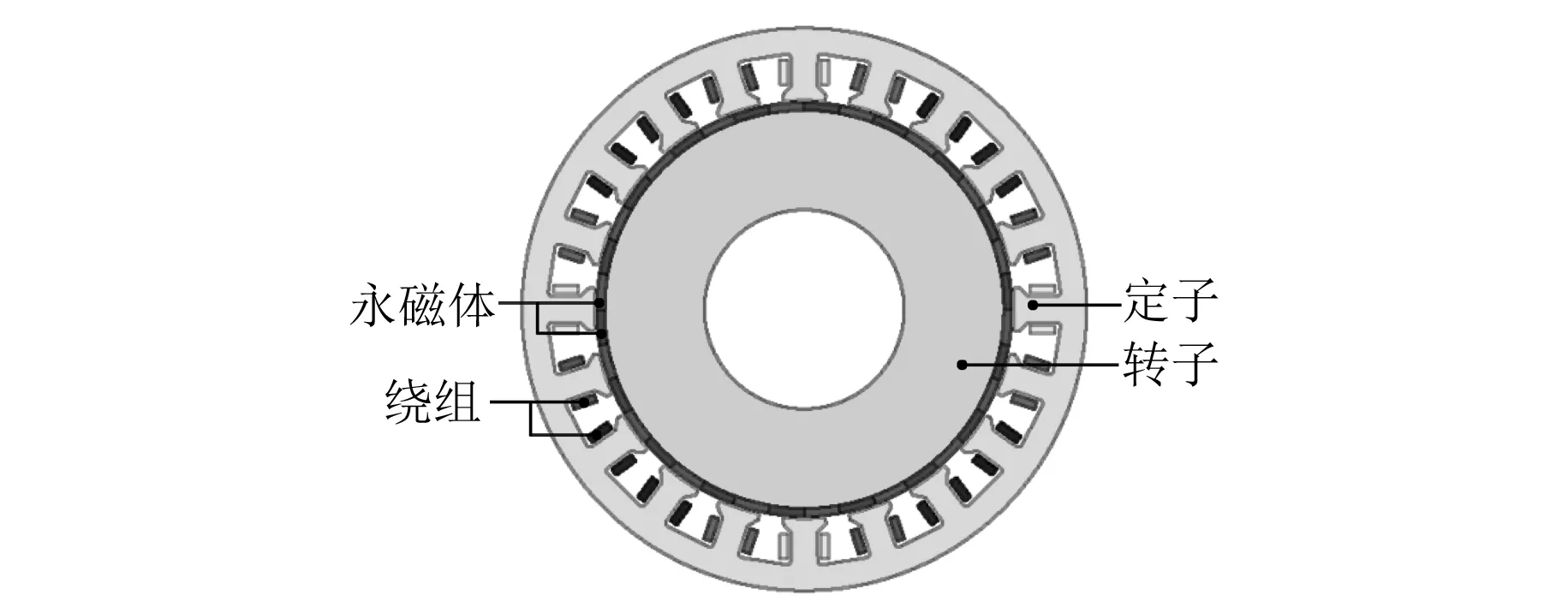
圖1 FPMSM截面示意圖
電機在正常狀態下,由自然坐標系變換到兩相靜止坐標系的擴展Clarke變換矩陣為[13](等幅值變換)

其中:α=2π/5
本文所研究的20/36極的FPMSM空載反電動勢正弦度高,因此反電動勢的方程可表示為
(2)
式中:E——FPMSM反電勢的幅值;
θ——轉子電角度。
轉子表貼式電機在正常狀態下,為了保證最大輸出轉矩,繞組中通入的電流應該與電機的空載反電動勢相位相同,即采用id=0控制。根據式(1)、式(2),FPMSM正常狀態下相電流可以計算出來[14]。
(3)
式中:iA、iB、iC、iD、iE——相電流;
id、iq——定子d、q軸電流。
定子繞組的總磁動勢MMF為
NiA+aNiB+a2NiC+a3NiD+a4NiE(4)
其中:a=cosα+jsinα
式中:N——相繞組的匝數。
2 電機容錯控制策略
2. 1 缺相后的正交降維變換矩陣
容錯控制策略的根本目的是保證電機在發生故障后仍能夠輸出平滑的轉矩,維持電機的平穩運行[15]。分析過程中,設A相發生斷路故障,故障后該相繞組電流為零,因此A相不參與機電能量轉換。缺相后通過對剩余相電流的幅值和相位進行補償,實現故障前后定子繞組磁動勢相等,進而實現電機的穩定運行。A相開路故障后,合成磁動勢可以表示為

FPMSM采用星型連接,且電機的中性點與直流側母線電容的中性點不相連,故剩余相電流滿足如下的約束條件:

式(5)和式(6)組成的線性方程組中含有3個方程4個變量,存在無窮多個解,將電機銅耗最小為目標函數進行優化,如式(7)所示。

則在滿足式(5)和式(6)的情況下,采用拉格朗日乘數法求解式(7)的最小值,從而推導出A相斷路故障下的電流表達式:
(8)
令
對比式(3)和式(8)可以看出,故障后電機A相電流為零,剩余正常相的電流幅值和相位均發生了變化。A相斷路故障后,去除式(1)中與A相相關的元素,得到故障后的變換矩陣:
(9)
式(9)中的行向量不再兩兩正交,如果仍然采用該解耦變換矩陣進行電機故障下的控制將會產生耦合電流。為了讓磁場定向控制能夠應用于容錯狀態,變換矩陣就需要重新定義。
電機在發生缺相故障后,對應相的電流為零,此時電機系統只含有3個控制自由度,選擇T1和T2作為基波子空間的基,Z1作為廣義零序子空間的基,這三個基兩兩正交。
電機發生故障后,基波子空間參與機電能量轉換。由于式(8)在電機故障下求解電流表達式的過程中隱含電流約束條件,且I1、I2正交,因此可以選擇I1、I2作為基波子空間的兩個正交基。
廣義零序子空間不參與機電能量轉換,但是會產生零序電流分量,與電機的銅耗相關,所以選擇合適的廣義零序子空間的基Z1,使得式(8)所示的缺相后容錯電流在廣義零序子空間的電流分量為零,也就是說與T1和T2正交,即:

Z1Is=0(11)
根據式(10)、式(11),取Z1為
(12)
考慮到剩余四相電流之和為零,所以擴展的Clarke變換矩陣為
(13)
其反變換矩陣為
(14)
Park和反Park變換矩陣如式(15)所示。
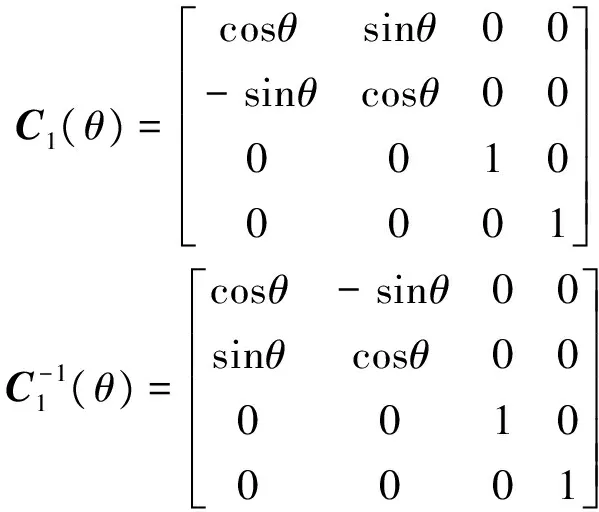
根據式(13)~式(15)可得電機發生缺相故障后由自然坐標系到旋轉坐標系的變換矩陣。
2. 2 故障后電機的數學模型
自然坐標系下,電機的電壓方程如式(16)所示。
(16)
將式(16)兩邊同時乘以T1(θ),變換到旋轉坐標系下,可得
式中:u=[uBuCuDuE]T;
i=[iBiCiDiE]T;
ψs=ψPM[cos(θ-α) cos(θ-2α) cos(θ+2α) cos(θ+α)];
ψPM——永磁磁鏈基波幅值。
令udqs=T1(θ)u、idqs=T1(θ)i、ψdqs=T1(θ)ψs,電機在旋轉坐標系下的電壓方程為
(18)
其中:
Ldqs=
從式(16)~式(18)可以看出,基于電機定子繞組銅耗最小求得的解耦變換矩陣在旋轉坐標系下電機的電壓方程中,d-q軸之間以及d-q子空間與零序諧波子空間之間的電感未能實現解耦,所以傳統的控制方法無法實現對各相電流分量的解耦控制。
2. 3 故障后的解耦容錯控制
構造矩陣P,使電感矩陣及磁鏈矩陣進一步簡化。
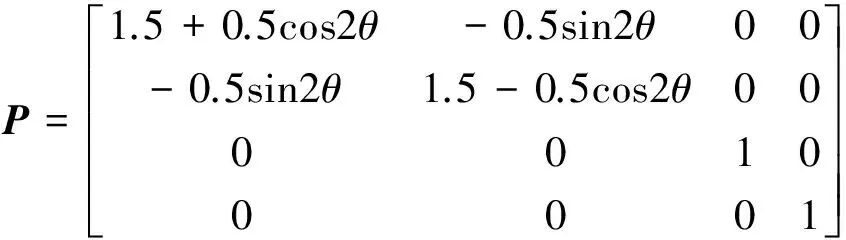
(19)

(20)
在式(20)中,相電阻中的交變量與交叉耦合量的幅值與轉速無關,因而可以忽略這一項的影響。從式(20)所示的電壓表達式可以看出,FPMSM正常狀態下的電壓方程形式與電機發生單相斷路故障后的形式是一致的,因而具有完全解耦的能力,所以矢量控制可以運用于電機的容錯運行。
由虛位移法求得電機工作在缺相故障狀態下的轉矩方程,如式(21)所示。
(21)
式中:Wco——電機的磁共能;
θm——轉子機械角;
p——電機極對數。
雖然i0不參與機電能量轉換,但是卻會產生脈動轉矩,所以i0應該控制為零,因此電機輸出轉矩與q軸電流成線性關系。
故障狀態下系統框圖如圖2所示。電機發生故障后,剩余相電流經過正交降維變換矩陣后得到d、q軸電流分量,與給定電流的誤差值經過PI控制器后得到電壓分量,然后經過P(θ)和正交降維變換矩陣轉換為相電壓的期望值。相電壓的期望值經過逆變器作用在FPMSM的輸入端,實現電機的容錯控制。
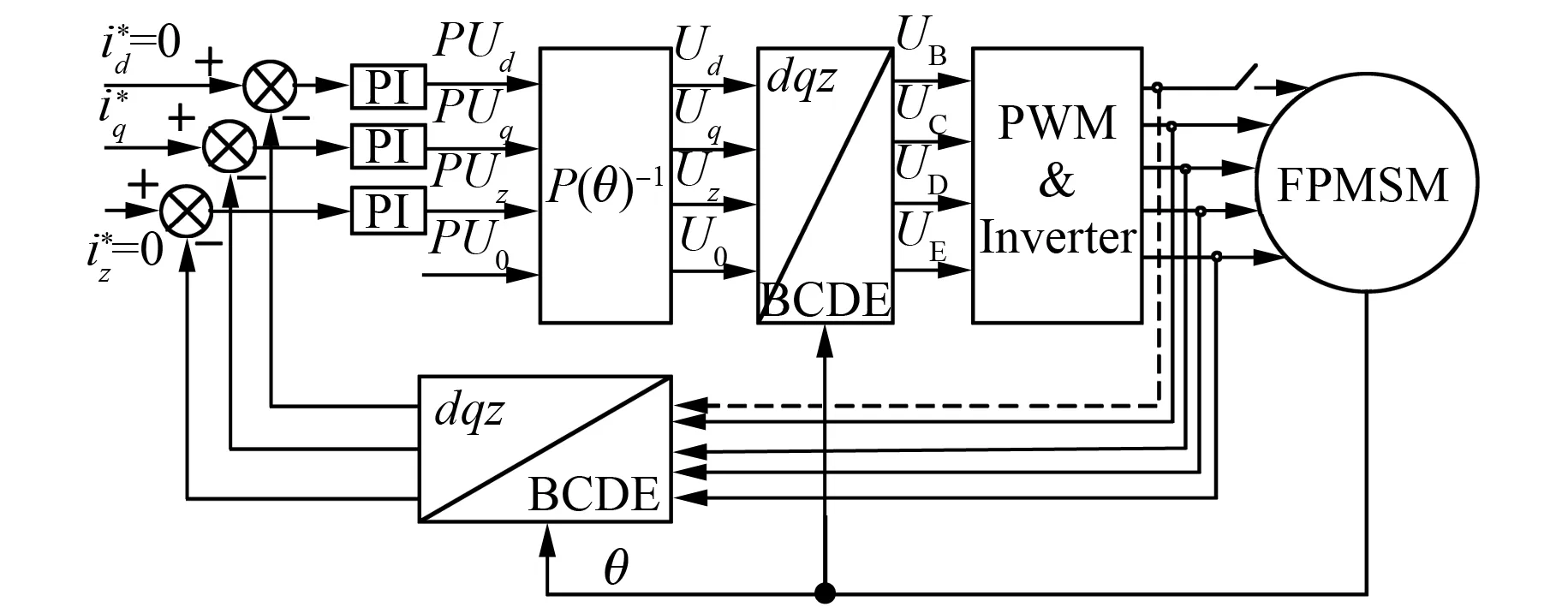
圖2 故障狀態下系統框圖
3 仿真及結果分析
考慮電機的磁路飽和以及強耦合的影響,本文采用Maxwell與Simplorer軟件聯合仿真的方法,實現電路和磁路的聯合仿真,使得仿真結果更接近于實際工況。20/36極的FPMSM聯合仿真模型如圖3所示。通過讓電機分別工作在正常、故障以及容錯狀態,從而得到不同狀態下的電流和轉矩波形。
為了更加準確地反映電機在不同狀態下的轉矩性能,電機轉矩脈動系數定義為
(22)

圖3 FPWSM聯合仿真模型
式中:Tmax、Tmin、Tav——輸出轉矩的最大值、最小值以及平均值。
FPMSM工作在正常狀態(給定轉速為1 500 r/min,額定負載為12 N·m)下的聯合仿真結果如圖4所示。正常狀態下,電機的平均轉矩為11.75 N·m,轉矩脈動系數K為20.51%。可以看出電機在正常狀態下,電流波形正弦度較高,各相電流幅值相等。

圖4 正常狀態電流和轉矩波形
當電機發生A相斷路故障后,未加入容錯控制策略,其電流和轉矩波形如圖5所示。故障狀態下轉矩的平均值為9.31 N·m,轉矩脈動系數K為68.85%。為了維持轉矩性能,各相電流幅值與正常狀態相比略微變大。由于電機缺失了一相,導致電機整體的性能下降。轉矩脈動變大,電機運行在不平衡狀態。
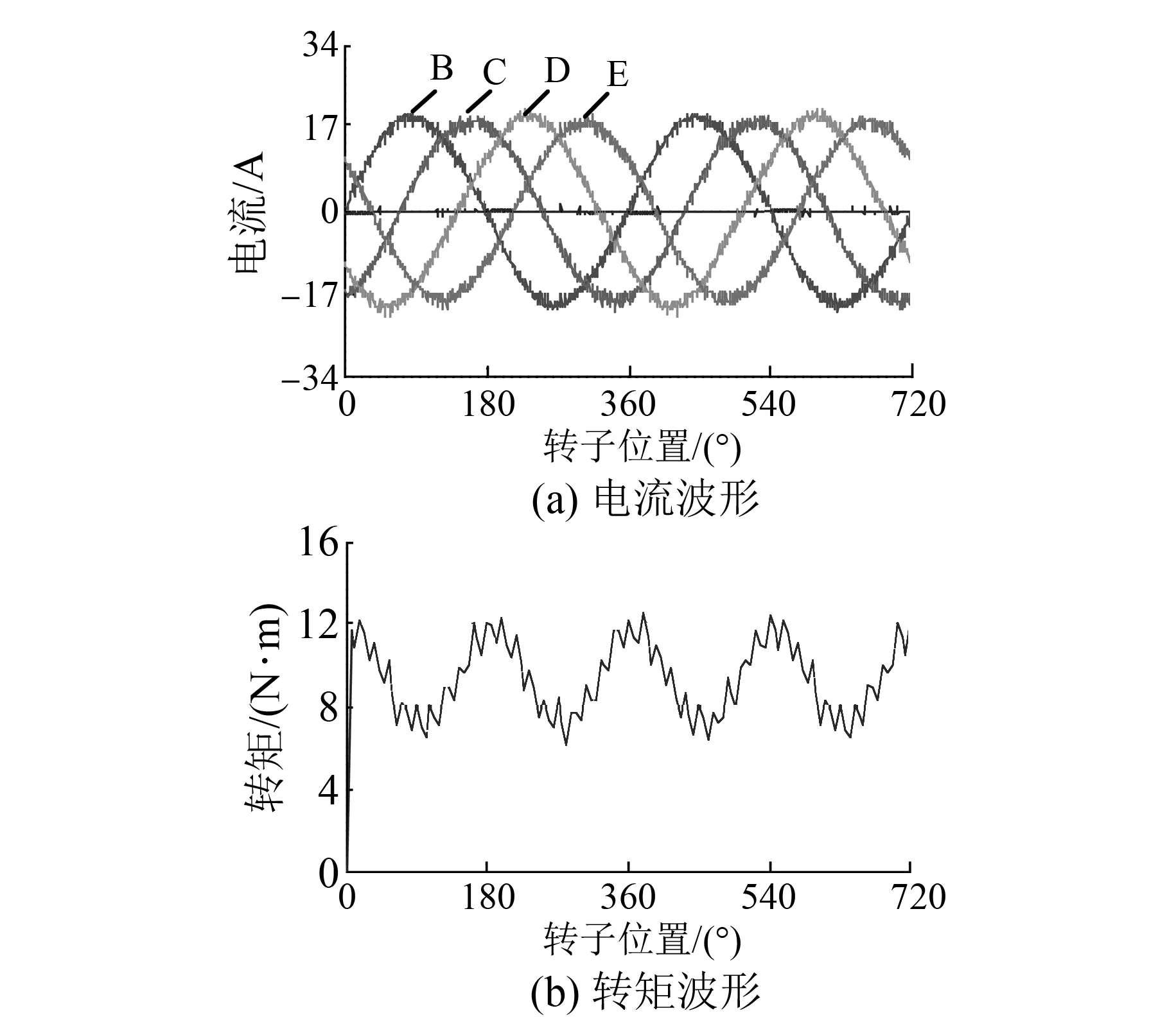
圖5 故障狀態下電流和轉矩波形
電機發生A相斷路故障,采用本文所提出的容錯控制策略對剩余相的電流進行補償。加入容錯控制策略后的電流和轉矩波形如圖6所示。

圖6 容錯狀態下電流和轉矩波形
容錯后的平均輸出轉矩為11.85 N·m,轉矩脈動系數K為24.64%。從圖6中可以看出,通過對剩余相電流進行補償,各相電流正弦度良好。與正常狀態下相比,B、E兩相電流幅值相等,C、D兩相電流幅值相等,且均大于正常狀態下電流的幅值,剩余相電流的相位也發生了變化,這與理論相符。轉矩脈動明顯下降,電機能夠獲得較平穩的運行性能,有效地改善了電機的控制性能。
表1對比了FPMSM在正常、故障以及容錯狀態下輸出轉矩的性能。結果表明,容錯控制策略能有效減少電機的轉矩脈動,提升電機在故障狀態下的轉矩性能。
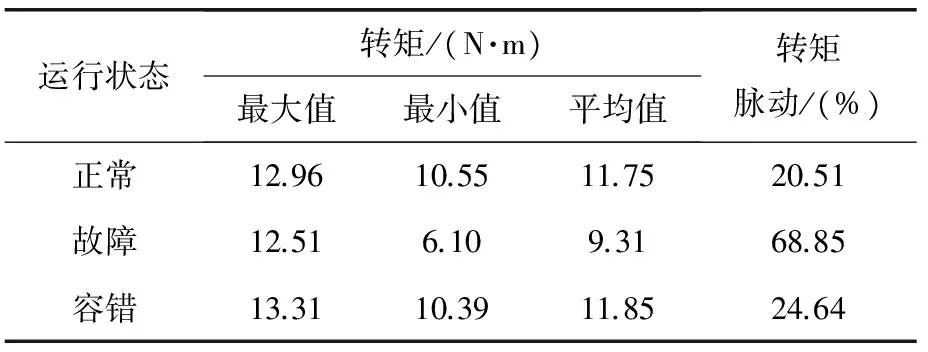
表1 不同運行狀態下轉矩性能
圖7給出了在同一電機、相同輸出功率的前提下,采用本文所提出的容錯控制方法和文獻[15]的容錯控制方法所得到的銅耗的對比圖。本文所提出的容錯控制方法銅耗平均值為210.3W,而文獻[15]銅耗平均值達到214.7W。因此,采用本文的容錯控制方法能降低電機繞組的銅耗,電機的效率得到提高。

圖7 銅耗對比圖
4 結 語
本文以20/36極的FPMSM為研究對象,分析了電機在單相斷路故障下的容錯控制策略,主要結論如下:
(1)FPMSM在發生缺相故障后,以銅耗最小為目標,對故障相的電流進行補償,保證了故障前后磁動勢不發生變化,從而使空間能夠形成圓形旋轉磁場,保證電機缺相后的平穩運行。
(2) 在優化電流的基礎上,推導出故障后的解耦變換矩陣,求解出電機在旋轉坐標系下的數學模型,從而實現了故障狀態下對勵磁電流分量和轉矩電流分量進行解耦控制,對轉矩進行線性調節,增強抗干擾能力。
(3) 通過聯合仿真的方法,驗證了容錯控制策略的有效性。本文所提出的容錯控制算法能夠在電機發生開路故障后,提供較好的轉矩性能,轉矩脈動較小,實現電機的平穩運行。
[1] 孫宇光,余錫文,魏錕,等.發電機繞組匝間故障檢測的新型探測線圈[J].中國電機工程學報,2014,34(6): 917-924.
[2] 劉劍,蘇健勇,楊貴杰,等.六相永磁同步發電機容錯控制的諧波補償研究[J].電機與控制學報,2014,18(1): 1-10.
[3] 趙品志,楊貴杰,李勇.五相永磁同步電動機單相開路故障的容錯控制策略[J].中國電機工程學報,2011,31(24): 68-76.
[4]CHEHS,DURANMJ,LEVIE,etal.Postfaultoperationofanasymmetricalsix-phaseinductionmachinewithsingleandtwoisolatedneutralpoints[J].IEEETransactionsonPowerElectronics,2014,29(10): 5406-5416.
[5]YUF,CHENGM,CHAUKT.Controllabilityandperformanceofanine-phaseFSPMmotorunderseverefiveopen-phasefaultconditions[J].IEEETransactionsonEnergyConversion,2016,31(1): 323-332.
[6] 趙文祥,唐建勛,吉敬華,等.五相容錯式磁通切換永磁電機及其控制[J].中國電機工程學報,2015,35(5): 1229-1236.
[7] 歐陽紅林,周馬山,童調生.多相永磁同步電動機不對稱運行的矢量控制[J].中國電機工程學報,2004,24(7): 145-150.
[8]ZHAOY,LIPOTA.Modelingandcontrolofamultiphaseinductionmachinewithstructuralunbalance.PartⅠ:Machinemodelingandmulti-dimensionalcurrentregulation[J].IEEETransactionsonEnergyConversion,1996,11(3): 570-577.
[9]ZHAOY,LIPOTA.Modelingandcontrolofamultiphaseinductionmachinewithstructuralunbalance.PartⅡ:Field-orientedcontrolandexperimentalverification[J].IEEETransactionsonEnergyConversion,1996,11(3): 578-584.
[10] 於鋒,程明,夏子朋,等.3種諧波電流注入模式下的磁通切換永磁電機缺相容錯控制[J].中國電機工程學報,2016,36(3): 836-844.
[11] 周長攀,楊貴杰,蘇健勇,等.基于正常解耦變換的雙三相永磁同步電機缺相容錯控制策略[J].電工技術學報,2017,32(3): 86-96.
[12]ZHOUH,ZHAOW,LIUG,etal.Remedialfield-orientedcontroloffive-phasefault-tolerantpermanent-magnetmotorbyusingreduced-ordertransformationmatrices[J].IEEETransactionsonIndustrialElectronics,2017,64(1): 169-178.
[13]GUZMANH,DURANMJ,BARREROF,etal.Comparativestudyofpredictiveandresonantcontrollersinfault-tolerantfive-phaseinductionmotordrives[J].IEEETransactionsonIndustrialElectronics,2016,63(1): 606-617.
[14]CHENQ,LIUG,ZHAOW,etal.AsymmetricalSVPWMfault-tolerantcontroloffive-phasePMbrushlessmotors[J].IEEETransactionsonEnergyConversion,2017,32(1): 12-22.
[15] 謝德娥,王宇,鄧智泉.考慮反電動勢2次諧波的容錯型磁通切換電機開路及短路故障控制策略[J].電工技術學報,2016,31(14): 130-138.
DecouplingFaultTolerantControlofFive-PhasePermanent-MagnetSynchronousMotorforSinglePhaseOpen-CircuitFaultBasedontheMinimumCopperLoss*
ZHAOMeiling,QUANLi,ZHANGChao,ZHUXiaoyong
(School of Electrical and Information Engineering, Jiangsu University, Zhenjiang 212013, China)
To improve the torque performance of five phase permanent magnet synchronous motor under fault condition, a decoupling fault tolerant control method based on minimum copper loss was proposed. The method which based on the principle of the constant stator magnetic motive force and minimum copper loss could be used to calculating the fault-tolerant current. Then, according to the compensation current, the reduced-order transformation matrix had been deduced. In the rotating coordinates, the mathematical model of the five-phase permanent-magnet synchronous motor was established. And the decoupling vector control method is achieved. The effectiveness of the proposed fault-tolerant control algorithm is verified by the method of co-simulation. The results of the simulation showed that the proposed fault-tolerant control could reduce the torque ripple under the faulty condition.
five-phasepermanentmagnetsynchronousmotor(FPMSM);open-circuitfault;copperloss;decoupling;fault-tolerantcontrol
國家自然科學基金項目(51377073)
趙美玲(1992—),女,碩士研究生,研究方向為多相永磁同步電機及其容錯控制策略。
全 力(1963—),男,博士生導師,教授,研究方向為特種電機和汽車的電氣控制技術。
TM 341
A
1673-6540(2017)12- 0126- 07
2017 -05 -23
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
汽車維修與保養(2019年7期)2020-01-06 03:30:42
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
汽車維護與修理(2016年10期)2016-07-10 08:17:41
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
