一種機電集成鍛造操作機鉗桿永磁傳動旋轉裝置
2018-01-24 07:59:14張鴻飛趙曉峰
鍛壓裝備與制造技術 2017年6期
張鴻飛 ,賈 ,趙曉峰 ,姚 鶴
(1.蘭州蘭石能源裝備工程研究院有限公司,甘肅 蘭州 730050;2.甘肅省金屬塑性成型裝備智能控制重點實驗室,甘肅 蘭州 730050)
鍛造操作機是鍛造行業自動化生產過程中不可或缺的輔助操作裝置,在提高生產率、改善生產條件、降低勞動強度、提高鍛造質量方面非常重要[1-2]。目前傳統的鍛造操作機主要是全液壓型驅動控制,其響應速度較慢,而且鍛造操作機鉗桿旋轉部分傳動機構采用液壓馬達、機械星型齒輪減速器、機械齒輪傳動形式,如圖1所示。由于機械齒輪傳遞效率高,傳動比穩定,可傳遞轉矩大等優點,廣泛應用于機械工業的各個領域[3-5],但是機械齒輪傳動中主、從動輪輪齒直接接觸,容易發生疲勞斷裂、摩擦損耗,產生振動、沖擊、噪聲及需要良好的潤滑;而且由于液壓馬達自身的特殊性,在啟動運行時不穩定、工作運行時有沖擊、振動、漏油,容易造成環境污染、維修不便,且進口價格昂貴[6]。目前國內外學者對鍛造操作機的研究主要在其機械結構優化分析、控制系統、疲勞[7-9]等方面,而對其傳動形式研究很少。
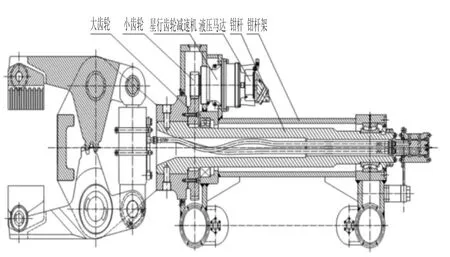
圖1 傳統鉗桿旋轉結構裝置
基于以上背景,本文提出了一種機電集成鍛造操作機鉗桿永磁傳動旋轉裝置,如圖2所示。它集磁場調制型磁齒輪與伺服電機控制的優點于一體,其控制精度、響應速度、單位體積力密度可與傳統液壓馬達、機械星型齒輪減速器組成的傳動機構相媲美[10]。
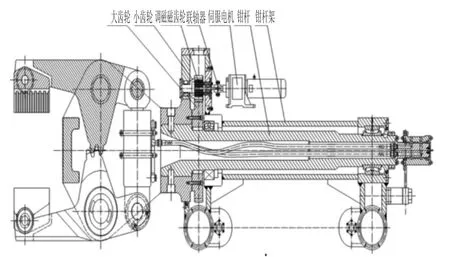
圖2 機電集成鉗桿永磁傳動旋轉結構裝置
1 三維模型
基于SolidWorks,按表1建立了一種機電集成鍛造操作機鉗桿永磁傳動旋轉裝置的結構簡化模型,如圖3所示。主要由伺服電機、內轉子(內轉子軸及其外表面永磁體)、調磁環、外轉子(小齒輪軸及其內表面永磁體)、嚙合的大小機械齒輪、鉗桿構成。內轉子、調磁環、外轉子構成第一級傳動;小齒輪軸、大齒輪、鉗桿構成第二級傳動。
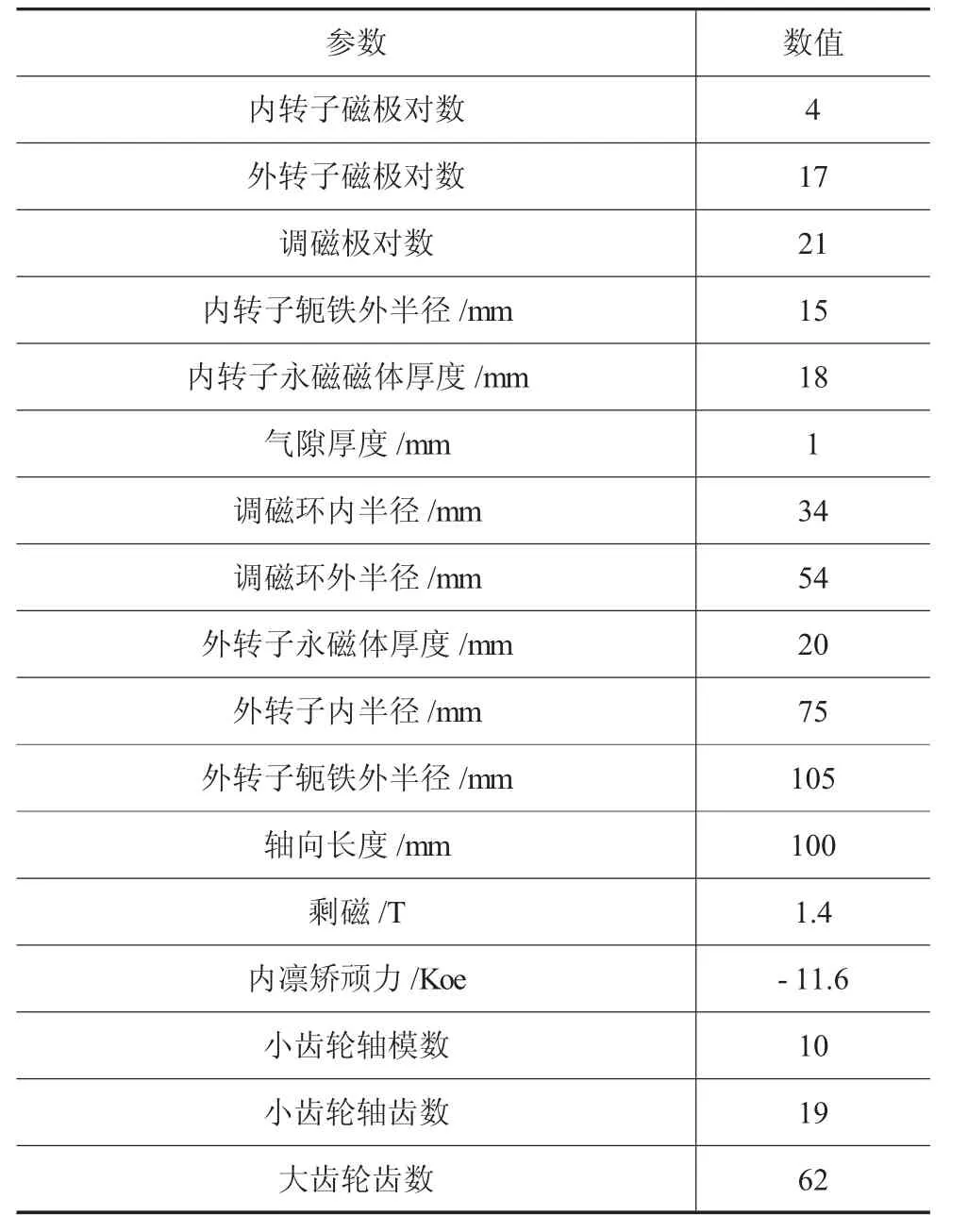
表1 主要參數
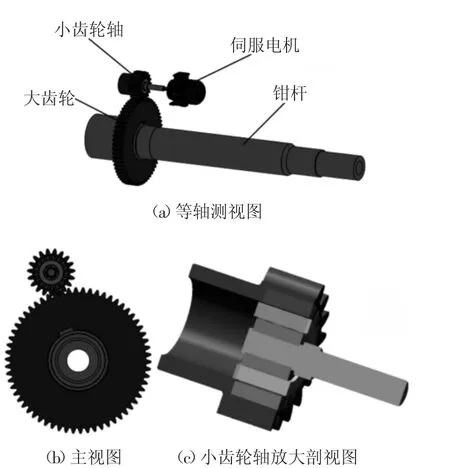
圖3 三維結構模型
2 工作原理
如圖3所示,機電集成鍛造操作機鉗桿永磁傳動旋轉裝置具有兩級減速機構,即小齒輪軸內部集成的磁場調制型磁齒輪,構成為第一級傳動;小齒輪軸與大齒輪嚙合傳動,構成第二級傳動;內轉子軸外表面間隔布置有極對數為p1的N極、S極永磁體,小齒輪軸內表面間隔布置有極對數為p2的N極、S極永磁體,調磁環由導磁和非導磁材料組成環形,導磁、非導磁極對數均為p1+p2。
當伺服電機驅動內轉子軸做旋轉運動的同時,內轉子軸外表面上的永磁體在氣隙1內產生主諧波次數為N1的旋轉磁場,正好與內轉子軸外表面永磁體極對數吻合,經調磁環磁場調制后,在氣隙2內產生主諧波次數為N2的旋轉磁場,正好和小齒輪軸內表面永磁體極對數吻合,實現其等磁極耦合傳動,從而使得小齒輪軸做回轉運動,實現其第一級減速傳動;當小齒輪軸做回轉運動的同時,小齒輪軸的輪齒與大齒輪輪齒做嚙合運動,進而驅動鉗桿做旋轉運動,實現其第二級減速傳動。
機電集成鍛造操作機鉗桿永磁傳動旋轉裝置的第一、第二級傳動的減速比及承載能力可分別調節內轉子軸外表面永磁體極對數、小齒輪軸內表面永磁體極對數、徑向厚度、軸向長度、永磁體剩磁等參數以及小齒輪軸、大齒輪輪齒數等參數實現,其轉速可通過伺服電機調節控制,實現其正反轉,從而實現鉗桿低速大扭矩傳輸,實現鉗桿的回轉夾持功能。
3 有限元分析法
3.1 有限元模型
機電集成鍛造操作機鉗桿永磁傳動旋轉裝置的第一級轉矩特性主要依賴于小齒輪軸內部集成的磁場調制型磁齒輪傳動機構,因此采用有限元法分析其轉矩特性時,只需單獨建立并分析小齒輪軸及其內部結構的有限元2D模型即可。基于Ansoft Maxwell電磁場有限元分析軟件,建立了如圖4所示的有限元分析模型,包括結構2D模型、初始網格劃分模型、磁力線分部模型。
從圖4a初始網格剖分上看,考慮到氣隙部分的磁阻比永磁體和小齒輪軸大,所以氣隙1、2部分的網格劃分較密,內轉子軸上的永磁體與內轉子軸的網格單元共用邊界節點,同樣小齒輪軸內表面上的永磁體與小齒輪軸的網格單元也共用邊界節點,且裝置的內、外轉子回轉過程中內轉子、外轉子單元剛性轉動,氣隙1、2中間位置處為非節點共用區,機構回轉過程中邊界節點之間通過插值實現內轉子與調磁環之間磁感應強度的計算,雖然插值計算會帶來一定的誤差,但氣隙網格較密,對整體計算精度影響不大。
采用有限元方法得到機電集成鍛造操作機鉗桿永磁傳動旋轉裝置的磁力線分布如圖4b所示。機電集成鍛造操作機鉗桿永磁傳動旋轉裝置的磁力線有兩種情況:①內轉子、外轉子傳動部分相鄰永磁體邊緣接觸部分的磁力線就近閉合;②內轉子軸外表面永磁體產生的旋轉磁場的磁力線經調磁環、小齒輪軸內表面永磁體、小齒輪軸形成回路,使得內轉子、調磁環及外轉子間存在耦合磁場,實現耦合傳動。
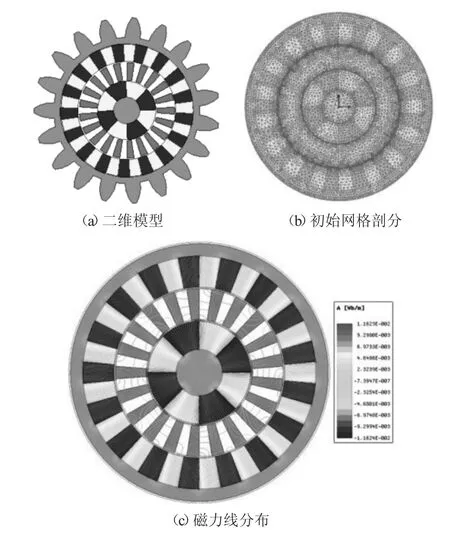
圖4 二維有限元模型
3.2 磁通密度及空間諧波
內轉子與外轉子間的相對旋轉角度為π/8時,利用有限元法得到氣隙1、2中間位置處的徑向、切向磁通密度,如圖5所示。由圖可知氣隙1、2的徑向和切向氣隙磁密經由調磁環磁場調制后,基本成正弦規律曲線變化,且氣隙2的磁密較氣隙1更密,幅值更大。
對氣隙1、2中間位置處的徑向磁通密度進行傅里葉變換即得到其所對應的空間諧波次數,如圖6所示。由圖可知氣隙1、2的空間主諧波次數正好與所設計的內轉子軸外表面永磁體極對數和小齒輪軸內表面永磁體極對數吻合,說明經調磁環調制后,內外轉子之間可以實現等磁極耦合傳動,除主諧波外,還存在著其他諧波分量。
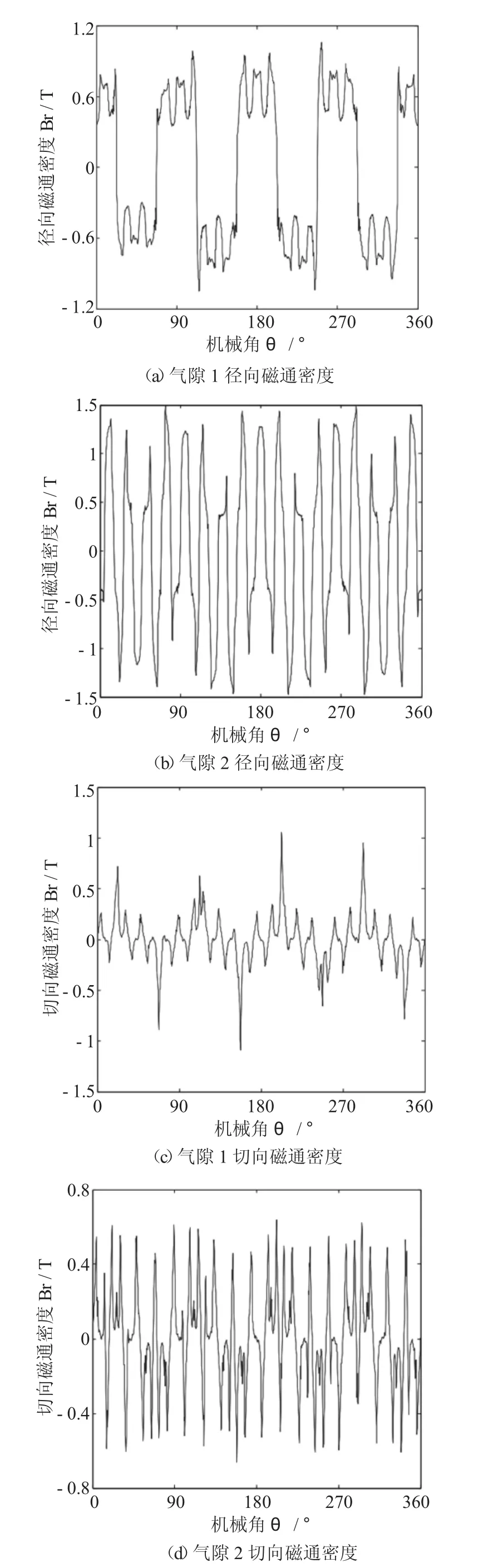
圖5 氣隙磁通密度
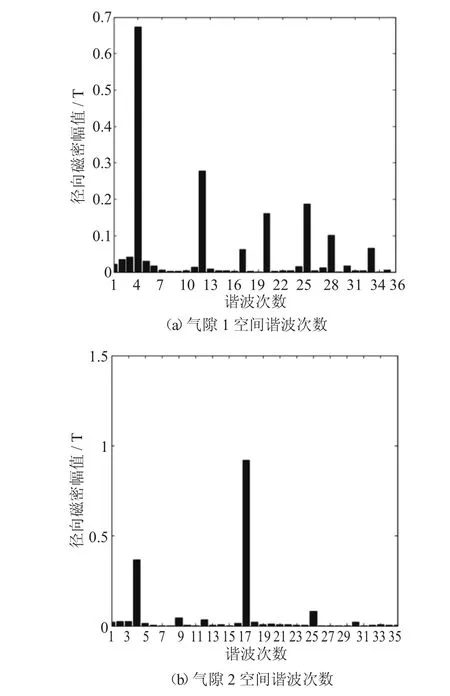
圖6 氣隙空間諧波次數
3.2 靜態轉矩特性
基于Ansoft Maxwell的magnetostatic分析,小齒輪軸(外轉子)固定不動,內轉子緩慢線性地轉過一定的機械角度(一個周期),即可得出外轉子的靜態轉矩曲線;內轉子固定,外轉子緩慢線性地轉過一定機械角度,也可得出內轉子的靜態轉矩特性曲線,機電集成鍛造操作機鉗桿永磁傳動旋轉裝置的第一級傳動的靜態轉矩曲線,如圖7所示。
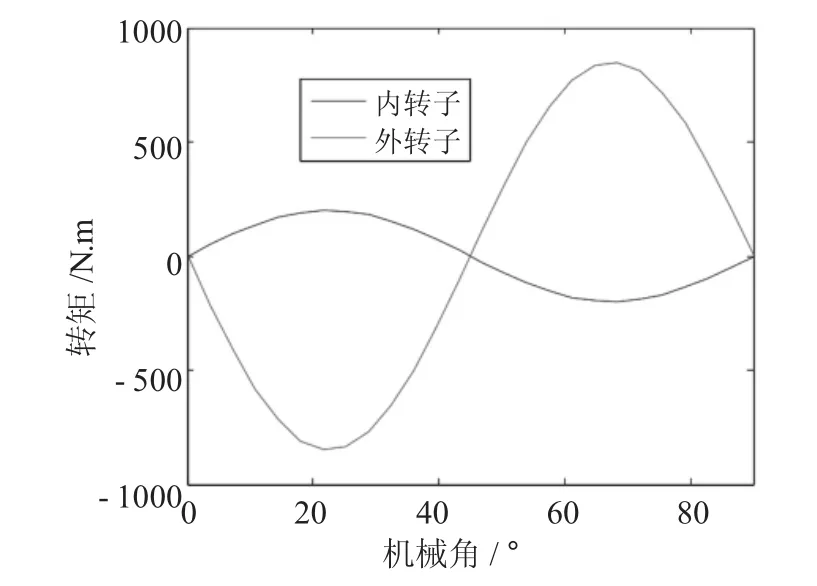
圖7 內外轉子靜態轉矩
機電集成鍛造操作機鉗桿永磁傳動旋轉裝置在運行過程中,其驅動能力取決于內轉子、外轉子的最大靜態轉矩,當小齒輪軸(外轉子)的負載大于外轉子所承受的最大靜態轉矩的時候,內、外轉子之間將失去磁耦合力作用,小齒輪軸(外轉子)靜止不動,伺服電機驅動內轉子做振蕩衰減運動,從而實現鉗桿裝置的過載自我保護。
3.3 動態轉矩特性
在帶負載穩定運行仿真過程中,以內轉子為輸入,小齒輪軸(外轉子)為輸出,基于Ansoft Maxwell的Transient分析,得出了機電集成鍛造操作機鉗桿永磁傳動旋轉裝置內、外轉子動態轉矩特性曲線,如圖8所示。
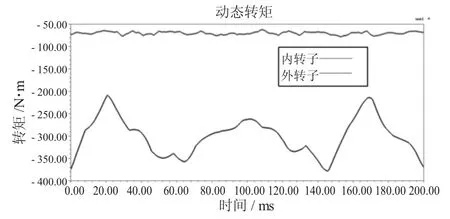
圖8 動態轉矩
由圖8可知,機電集成鍛造操作機鉗桿永磁傳動旋轉裝置的內、外轉子穩態運行過程中,其轉矩具有微小波動特性,且其所傳遞的轉矩符合傳動比4.25。由于仿真過程中外轉子的機械特性,如轉動慣量、摩擦阻尼未加考慮,導致穩態運行時,外轉子的動態轉矩波動較大。
3.4 啟動特性
在空載啟動仿真過程中,以內轉子為輸入,小齒輪軸(外轉子)為輸出。內轉子軸在伺服電機驅動下,以85rpm的旋轉轉速驅動小齒輪軸旋轉,仿真時間為500ms,基于Ansoft Maxwell的Transient分析,機電集成鍛造操作機鉗桿永磁傳動旋轉裝置由啟動到穩態運行過程中,內轉子、小齒輪軸(外轉子)的轉速、轉矩如圖9、圖10所示。
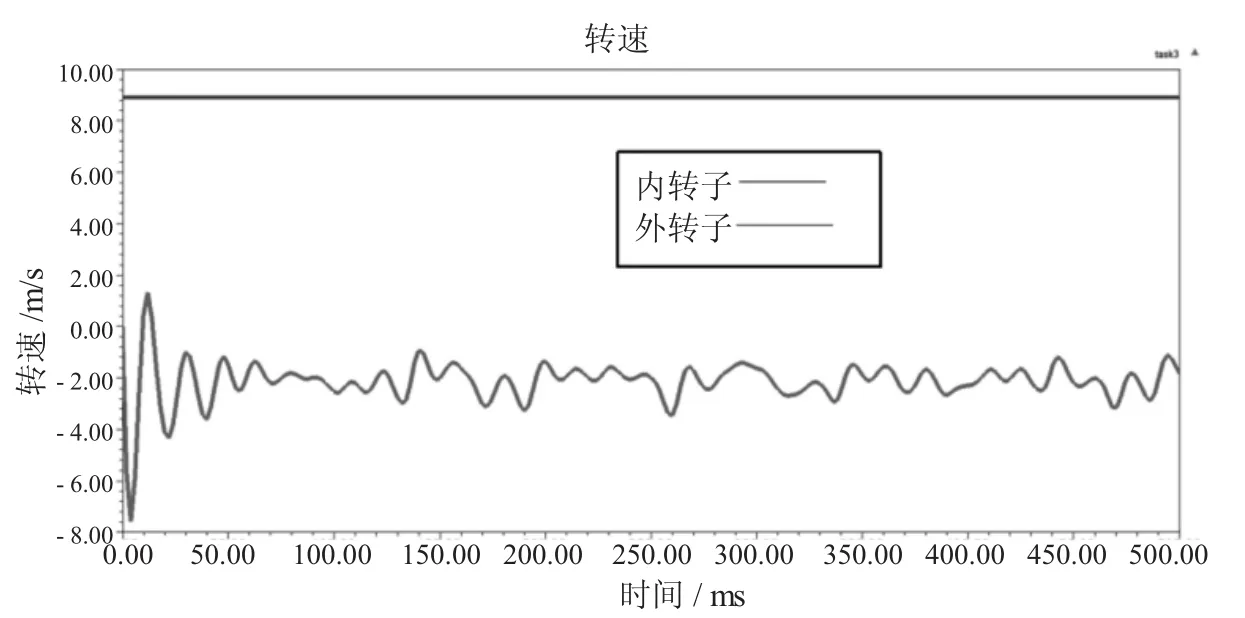
圖9 啟動轉速
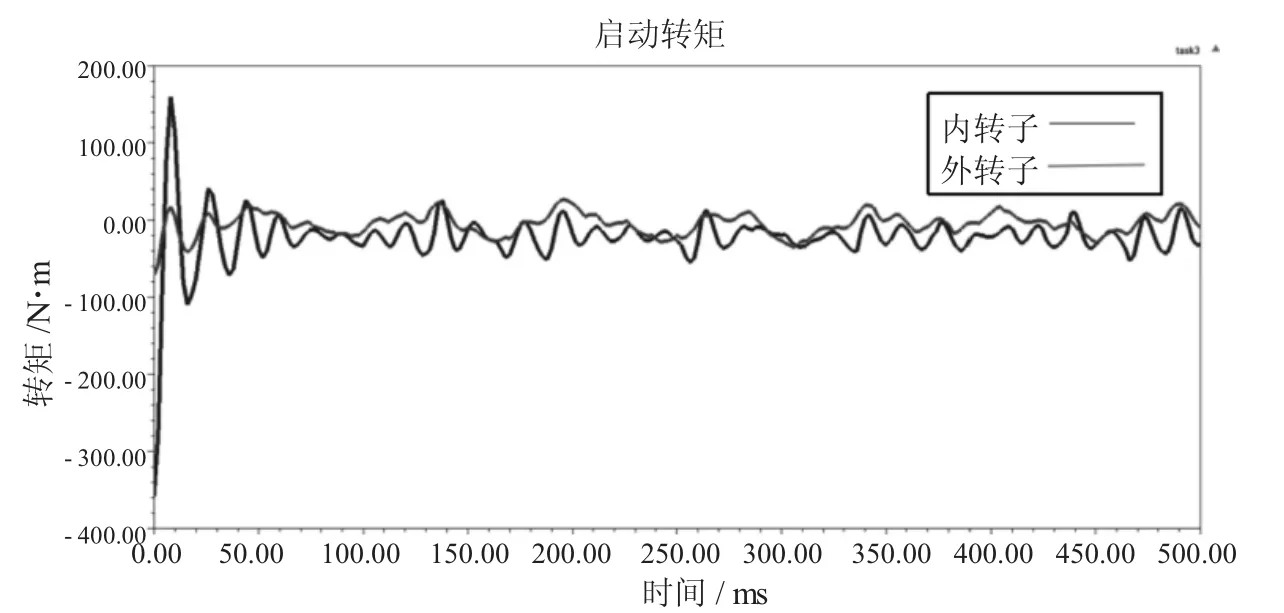
圖10 啟動轉矩
由圖9可知,機電集成鍛造操作機鉗桿永磁傳動旋轉裝置的內轉子通過磁耦合作用驅動小齒輪軸(外轉子)旋轉,且其轉速傳動比符合4.25。小齒輪軸(外轉子)在內轉子驅動下外轉子速度由開始的較大波動到穩定運行,其速仍然具有微小波動,小齒輪軸(外轉子)旋轉速度由暫態進入穩態的運行時間很短。
由圖10可知,機電集成鍛造操作機鉗桿永磁傳動旋轉裝置的內、外轉子轉矩啟動后由暫態振蕩進入到穩態,由于空載起步,所以內、外轉子轉矩繞坐標軸原點零位置上下波動。
4 結論
(1)機電集成鍛造操作機鉗桿永磁傳動旋轉裝置的氣隙1、2內的磁場主諧波次數與其對應的內、外轉子磁極對數吻合,且各氣隙內磁場為包含主諧波在內的多次諧波疊加,從而揭示了其磁耦合工作機理。
(2)基于Ansoft Maxwell,利用麥克斯韋應力張量法,得出的內、外轉子靜態轉矩呈正弦規律變化,且內、外轉子的最大靜態轉矩分別為200N·m和850N·m。
(3)機電集成鍛造操作機鉗桿永磁傳動旋轉裝置的內、外轉子在工作過程中其轉速、轉矩均具有微小波動,且其工作狀態由暫態到穩定時間很短。
[1]張營杰,衛凌云,牛 勇,等.鍛造操作機發展現狀與研究方向[J].鍛壓裝備與制造技術,2012,47(2):11-14.
[2]王鳳喜.鍛造液壓機與操作機的發展[J].鍛壓裝備與制造技術,1998,33(6):3-5.
[3]趙 韓,吳其林,黃 康,等.國內齒輪研究現狀及問題研究[J].機械工程學報,2013,19:11-20.
[4]王麗娟,黃清世,鄒 雯.齒輪發展研究綜述[J].機械研究與應用,2008,(1):17-18.
[5]鄂中凱.齒輪傳動設計[M].北京:機械工業出版社,1985:1-53.
[6]秦春魁.液壓馬達起動及低速力矩特性綜述[J].西安冶金建筑學院學報,1979,(Z1):115-126.
[7]YaJunFan,AnLeMu,TaoMa.Design and control of a point absorber wave energy converter with an open loop hydraulic transmission[J].Energy Conversionand Management,2016.
[8]郝立文.大型鍛造壓機操作系統的發展方向[J].黑龍江科技信息,2016,(23):161-162.
[9]陳高杰.鍛造操作機鉗臂結構疲勞分析[D].大連:大連理工大學,2009.
[10]AtallahK,Howe D.A Novel High-Performance Magnetic Gear[J].IEEE Transactions on Magnetics,2001,37(4):2844-2846.
