數顯扭力扳手的設計
2018-01-25 10:52:30侯飛
時代農機 2017年11期
侯 飛
(衢州億龍信息技術有限公司,浙江 衢州 324000)
數顯扭力扳手顧名思義就是帶數字顯示的扭力扳手(扭矩扳手,力矩扳手),它是在機械扭力扳手的基礎上發展而來,其功能更加強大。數顯扭力扳手自出現之日起已經有了長足的發展,技術方面日漸成熟。其擁有強大的操作功能,包含扭力設定;單位設定;模式設定;數值儲存;數值清除以及數值輸出等。
數字扭力扳手是扭矩扳手中最高級的一種,不但能夠當施加的扭矩達到設定值時,扳手會發出“卡塔”聲響或者扳手連接處折彎一點角度,而且會通過數字顯示屏或者LED燈來提示使用者,而且在扭矩的設定上也能夠通過按鍵和數字顯示屏來完成,比之非數顯扭力扳手更方便也更易與操作。總而言之數顯扭力扳手是扭矩扳手中最易于操作的,它通過安裝數字顯示屏降低了對操作人員的要求。
數顯扭力扳手的技術被國內幾家公司壟斷,他們利用手中的技術控制著一些小型企業。他們高價出售自己的核心板從中賺取利潤。這種方式大大制約著小型企業的發展,并且也是數顯扭力扳手價格高的原因。現在市場上出現了形形色色的數顯扭力扳手,功能大致一樣,但是其性能存在很大的差異。最主要的差別在于處理器的處理性能、硬件電路的體積以及產品的節能方面。廠家為了減少科研經費,只用以前成型的技術進行生產,這樣也遲滯了數顯扭力扳手的技術進步。現在大部分的扭力扳手存在著一些問題,如處理速度慢,準確度不高,而且經常更換電池 ,給生產方面帶來極大的不便。
現在市場上的數顯扭力扳手價格相當昂貴,對于普通的公眾難以接受。隨著一些低價格、高性能芯片的出現,現在的扭力扳手顯得有些過時,并且價格過高,遲早要被淘汰。因此,研發一款性價比高的數顯扭力扳手將有很大的市場前景。而且對于它的研發也可以打破行業間的技術壟斷,增強小型企業的競爭力,也為其本身的完善打好基礎。
1 系統工作原理圖
數顯扭力扳手系統工作原理圖如圖1所示,其核心組成包括MSP430F4270單片機和扭矩傳感器,以及液晶顯示和聲光報警的人機交互部分。扳手連接完成后,由人控制扳手臂旋扭螺母,扭矩傳感器獲得電壓值送給單片機的放大電路,放大出來的電壓再由單片機處理后在段式液晶上顯示出來,并在一定條件下啟動聲光報警裝置。

圖1 系統工作原理圖
2 硬件部分
本項目中的扭力扳手檢測裝置由標準扭矩傳感器、扭矩測量儀表兩部分構成,硬件構架主要包括單片機、顯示模塊、電源模塊、聲光報警模塊、扭力采集模塊等部分組成,其電路硬件原理圖如圖2所示。圖3所示是其硬件的PCB圖。圖4是其制作完成后的實物圖。

圖2 電路硬件原理圖

圖3 電路硬件PCB圖

圖4 電路硬件實物圖
3 軟件部分
本項目中的扭力扳手裝置內的程序其流程圖如圖5所示。操作過程如下:①電源打開后程序開始運行,系統進入工作模式;②系統工作之初要進行程序的初始化,使程序進入正常狀態;③顯示程序驅動液晶顯示出扭力值;④單片機對輸出的扭力值進行判斷;⑤扭力值大于設定值,聲光報警系統啟動,提示外力停止施力;⑥扭力值小于設定值,外力繼續施力,直至報警提示,否則程序循環;⑦單片機關閉程序,程序結束。

圖5 程序流程圖
4 系統方案總結
根據本項目的研究結果展開了以下3點總結分析:
(1)標準數據與實驗數據,如表1所示。
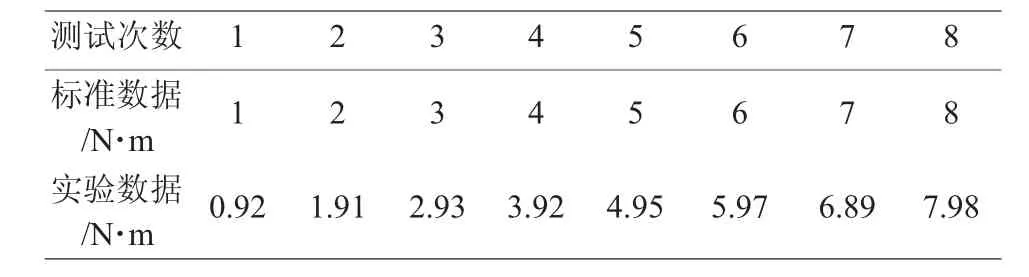
表1 標準數據與實驗數據比較表格
(2)實驗數據分析。從表1可以看出測量值是與實際值有一定差別的,并且測量值的數據規律性不強,抖動性強烈,其原因是與信號采集模塊有關。還有一點,實驗數據都比標準數據小,其存在的原因是扭力扳手的頭相對而言重量大,在重力作用下產生一定的扭力值疊加到實驗數據上造成一定偏差。
(3)系統改進。上面已經得出了產生誤差的原因解決方案如下:①針對其數據的抖動性,改進方式是濾波電路的改進。基于信號的等級選取適當的濾波電路。取一次值也影響到扭力值的精確性,所以采測量多次值然后取其平均值的方式;②平衡重力所產生的誤差。通過多次實驗測得扭力機械結構所產生的扭力大小,在不同方向用力時加或是減掉這一值。
[1]李秀忠.單片機應用技術[M].北京:人民郵電出版社,2007.
[2]李全利.單片機原理及應用技術[M].北京:高等教育出版社,2008.
[3]魏小龍.MSP430系列單片機接口技術及系統設計實例[M].北京:北京航空航天大學出版社,2002.
[4]何立民.MCS-51系列單片機應用系統設計系統配置與接口技術[M].北京:北京航空航天大學出版社,1990.
[5]劉志峰,劉光復.綠色產品設計與可持續發展[J].機械設計,1997,(1).
[6]甘作霖,王鶴.液壓脈沖氣扳機[J].鑿巖機械氣動工具,1991,(3):17-22.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
人大建設(2019年12期)2019-05-21 02:55:44
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
家庭影院技術(2017年9期)2017-09-26 03:41:45
環球時報(2017-03-30)2017-03-30 06:44:45