以CMOS圖像傳感器為主的視頻監視實驗系統設計分析
2018-01-25 10:52:31蔡燕平
時代農機 2017年11期
關鍵詞:系統
蔡燕平
(湖南華南光電(集團)有限責任公司,湖南 常德 415007)
在傳感器技術不斷發展的今天,CMOS圖像傳感器的開發和應用可以對某一場景和目標進行監控,獲取準確的圖像。而將其應用于視頻監視實驗系統當中,可以有效提高信息收集的效率,其主要對多幅圖像信息進行觀察和分析,獲得正確的監控信息,滿足人們對目標進行跟蹤和監督的要求。因此文章以此為基礎進而探析系統設計的方法,使系統的作用得以充分發揮出來。
1 系統的主要構成部分及工作原理
(1)系統主要構成部分。以CMOS圖像傳感器為主的視頻監視實驗系統通常使用后端顯示與控制系統、傳輸系統、前端探測系統等部分構成。其中前端探測系統在進行組裝的時候,通過采用電控柜、攝像轉臺等構成。在攝像轉臺當中,其主要包含微光電視、可見光攝像機、嵌紅外熱像儀等,這些部件當中可見光攝像機和紅外熱像儀主要在明亮的白天進行工作,而微光電視和紅外熱像儀則可以在晚上進行工作。在系統當中電控柜,其由圖像融合電路、圖像預處理電路等部分組成。最后傳輸系統在進行設計的時候,包含光纜、光端機這兩部分。而后端顯示與控制系統則通過電視墻、操控臺這兩方面發揮作用。具體情況如圖1所示。
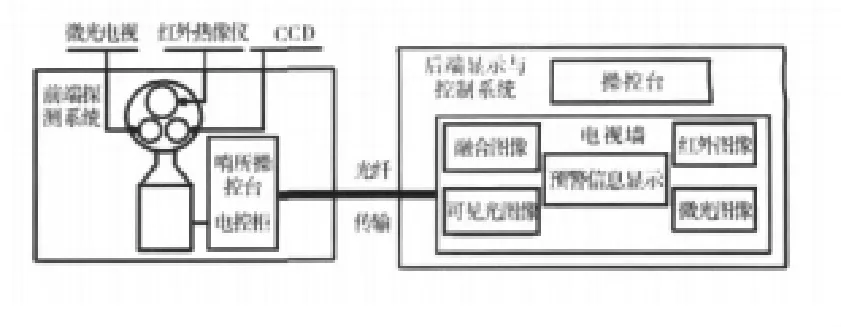
圖1 以CMOS圖像傳感器為主的視頻監視實驗系統組成圖
(2)系統的工作原理。在系統當中,其包含的前端探測系統由紅外熱像儀、微光電視主要通過圖像預處理電路,完成視頻收集和處理的要求,使其最終形成完整的數字視頻。接著需要把經過初級處理的數字微光視頻進行下一步的空濾波降噪處理,并且通過數字紅外視頻促進其圖像質量的提高。然后對圖像進行配準處理,在完成圖像融合的步驟之后,數字視頻可以到達視頻壓縮電路。另外經過處理的紅外和微光視頻也會到達視頻壓縮電路,接著進行壓縮的3路數字視頻,在完成壓縮的操作之后使其可以到達傳輸系統。在傳輸系統當中有自動設置,可以及時把視頻數據和相關的信息傳送到后端顯示與控制系統。另外顯示與控制系統會顯示出所傳輸的學習,并且往前端探測系統提出指令。在彩色攝像機進行對比,黑白攝像機在靈敏性方面要明顯高于前者,可以在亮度較差的地方進行使用。

圖2 系統的工作原理
2 前端探測系統設計
前端探測系統對監視系統設計有著重要的影響作用,其在設計的時候,需要合理應用攝像轉臺、電控柜和簡易操控臺這三個部分,完成設計的要求。
2.1 外形設計
轉臺的外框架屬于進行支撐支承臺體的結構,其材料和質量均會導致框架的使用壽命受到影響。在轉臺的外框架當中,其主要裝有上方位自由度部分、俯仰自由度部分、球殼部分等。球殼當中包含裝可見光攝像機、微光電視、紅外熱像儀這三個部件。俯仰自由度部分可以使球殼的可以上下進行移動+90°~-30°。而方位自由度部分則可以使攝像轉臺進行左右±175°方位的旋轉。具體情況如圖3所示。

圖3 前端探測系統
2.2平行光軸設計與調校
(1)平行光軸設計。在目前的綜合光電系統當中,多光軸的平行性會直接影響到攝像的效果。如果兩個傳感器之間可以實現光軸平行,則可以設視場為2θ,并且使用f進行代表光學物鏡的焦距,d代表圖像傳感器的具體邊長,u為傳感器到目標之間的距離,b為兩物鏡之間的具體距離。鏡頭1的視場2θ可以采用公式tanθ=d/2f進行表述。如果物體之間的距離是無限的,θ無限接近于零的時候,則可以認為θ約等于d/2f。而兩鏡頭的重合度ε可以采用公式ε=(2uθ-b)/2uθ=1-b/2uθ進行表示,并且設定Δ等于b/2uθ,則其重合度ε可以等于1-Δ。當Δ無限接近于零的時候,則重合度ε和1也就越接近。換句話說,如果兩個傳感器中心距無限接近于零,并且目標距離明顯大于傳感器中心距的時候,視場重合度將可以等同1,實現視場重合。在此系統當中,在實際接觸的時候u的值均處于比較大的狀態,20km左右,而b的值將低于或者等于0.5m,可以滿足符合圖像融合重合度需要超過90%的要求。另外需要意識到在現實生活中,兩傳感器光軸無法保持絕對平行的現象。在這種情況下可以假設2α為兩光軸的夾角,在進行計算重合度的時候,可以采用ε=(2utanα-b)/4utanθ這個公式進行計算。因此可得出當圖像傳感器光軸夾角不大于0.5mrad時能滿足圖像融合視場重合度的要求。

圖4 光軸平行性對圖像融合的影響
(2)平行光軸調校。在調試平臺當中需要合理安置探測器,在使其保持固定的同時,需要采用紅外熱像儀光軸作為衡定的標準。在操作的時候,首先需要進行調節紅外熱像儀視場十字分劃線,其位置需要和靶標的十字線分劃線保持一致,在使紅外熱像儀的位置得到確定之后,需要將靶標的位置當做衡定標準的位置完成記錄。其次需要進行切換,使可見光攝像機1的視場可以清楚顯示,在進行調整可見光攝像機1位置的時候,需要進行固定板上的4個過孔上下、左右位置,并且采用監視器進行檢查可見光攝像機1的十字圖像,最重要的就是要使中視場1的光軸對小視場光軸的平行度之間差距需要低于0.5mrad。最后使用以上的位置調整方法,運用讓可見光攝像機2和微光電視光軸這兩者均和紅外熱像儀光軸的平行性之間差距需要低于0.5mrad,然后給4個攝像單體固定板當中起到固定作用的螺釘涂上適量的膠水,并且使用工具將其擰緊。在完成這些操作步驟之后,多視場光軸的平行性位置的確定和功能應用均可以得到有效保障。
3 結語
充分利用可見光攝像機、微光電視、紅外熱像儀這三個部件的作用,可以構成以CMOS圖像傳感器為主的視頻監視實驗系統。在對其進行設計的時候,最重要的是要完善其前端探測系統。前端攝像轉臺需要達到俯仰+90°~-30°以及旋轉±175°方位旋轉的要求,并且在進行調整的時候,需要各探測器光軸平行性之間差距需要低于0.5mrad,才能使系統的設計實現圖像融合的目標,最終使系統可以順利進行準確目標監測。
[1]張兢.正交小波變換在圖像融合中的應用[J].微計算機應用,2016,27(4):389-392.
[2]梅遂生,王戎瑞.光電子技術[M].北京:國防工業出版社,2015.
[3]張俊舉,常本康,張寶輝,等.遠距離紅外與微光/可見光融合成像系統[J].紅外與激光工程,2015,(1):20-24.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32