基于移動(dòng)機(jī)器人的變電站儀表自動(dòng)識(shí)別研究
2018-01-25 18:47:12高旭王育路曾健
電網(wǎng)與清潔能源 2017年11期
高旭,王育路,曾健
(1.國網(wǎng)陜西省電力公司榆林供電公司,陜西榆林 719000;2.國網(wǎng)陜西省電力公司經(jīng)濟(jì)技術(shù)研究院,陜西西安 710075;3.國網(wǎng)陜西省電力公司,陜西西安 710048)
隨著科技進(jìn)步和電力體制改革的不斷深入發(fā)展,電力系統(tǒng)自動(dòng)化程度已有很大提高,變電站值班也逐漸趨于無人化或少人化。為了保證變電站設(shè)備的安全可靠運(yùn)行,更快地推進(jìn)變電站無人值守的進(jìn)程,利用智能移動(dòng)機(jī)器人完成電站設(shè)備的巡檢,就目前的技術(shù)而言,可以說是提高工作效率和質(zhì)量、減員增效的理想方案之一[1]。因此研制開發(fā)變電站設(shè)備巡檢機(jī)器人有重要的意義,其中利用移動(dòng)機(jī)器人定位儀表的位置是一項(xiàng)研究熱點(diǎn)。
由于目前智能變電站中尚存的儀表大多數(shù)都是指針式儀表,該類型的指針式儀表不具有數(shù)據(jù)接口,無法實(shí)現(xiàn)測(cè)量參數(shù)的自動(dòng)化采集與傳輸,另外對(duì)于此類數(shù)據(jù)的記錄主要依靠人工,受到人的主觀因素和客觀因素的影響。使用巡檢機(jī)器人代替巡檢人員對(duì)電力設(shè)備進(jìn)行巡檢,可以提高變電站的巡檢質(zhì)量和效率。巡檢機(jī)器人在巡檢時(shí)由于機(jī)械間隙和停車精度等因素,基本很難保證對(duì)待檢測(cè)設(shè)備的拍攝位置完全保持一致,對(duì)同樣的設(shè)備在不同的拍攝位置拍攝時(shí),會(huì)有小幅位移和一定的旋轉(zhuǎn),如果不能準(zhǔn)確定位變電站重要電氣設(shè)備的位置,勢(shì)必會(huì)導(dǎo)致巡檢過程匯總產(chǎn)生大量冗余信息,干擾巡檢系統(tǒng)的智能報(bào)警判斷,同時(shí)使系統(tǒng)的穩(wěn)定性與時(shí)效性下降[2]。
在儀表的智能化識(shí)別過程中,如何精確地定位儀表在圖像中的位置是一項(xiàng)重要的內(nèi)容。通過對(duì)Hough變換[3-4]進(jìn)行改進(jìn)之后提取圓形特征進(jìn)行檢測(cè)。BP神經(jīng)網(wǎng)絡(luò)的構(gòu)建原理簡(jiǎn)單,訓(xùn)練迭代過程時(shí)間復(fù)雜度不高,有利于實(shí)現(xiàn)快速的智能識(shí)別[5-8]。研究者對(duì)變電站儀表識(shí)別方面的探索與應(yīng)用在某些情況下已達(dá)到較好的效果,但面對(duì)復(fù)雜變電站場(chǎng)景下儀表識(shí)別的魯棒性,目前還很難有一種方法能夠較好地解決問題。
稀疏表示理論是近年來研究與應(yīng)用的熱點(diǎn)領(lǐng)域。它與傳統(tǒng)的奈奎斯特采樣定理不同,通過訓(xùn)練一個(gè)過完備且與變換基不相關(guān)的字典,將高維信號(hào)映射到低維空間上,在求得映射的最優(yōu)化稀疏向量后,可從少量的信號(hào)重構(gòu)出原信號(hào)。稀疏表示具有特征保持性、稀疏性等特點(diǎn),目標(biāo)信號(hào)可以通過該理論采集的少量信號(hào)值實(shí)現(xiàn)精確重建。
將稀疏表示理論引入到智能變電站移動(dòng)機(jī)器人的儀表識(shí)別中,對(duì)復(fù)雜場(chǎng)景下該理論的應(yīng)用進(jìn)行適應(yīng)性研究。圖1為本文的自動(dòng)識(shí)別變電站儀表的技術(shù)路線。首先選用方向梯度直方圖特征對(duì)圖像中的目標(biāo)進(jìn)行特征提取。另一方面,采集代表性樣本進(jìn)行基于稀疏表示方法的過完備字典訓(xùn)練,訓(xùn)練得到的字典具有非負(fù)性。最后通過待測(cè)目標(biāo)在字典中稀疏度和重構(gòu)殘差判定目標(biāo)類別。實(shí)驗(yàn)結(jié)果表明,本文提出的方法在復(fù)雜的變電站場(chǎng)景中有較好的識(shí)別率和實(shí)時(shí)性。
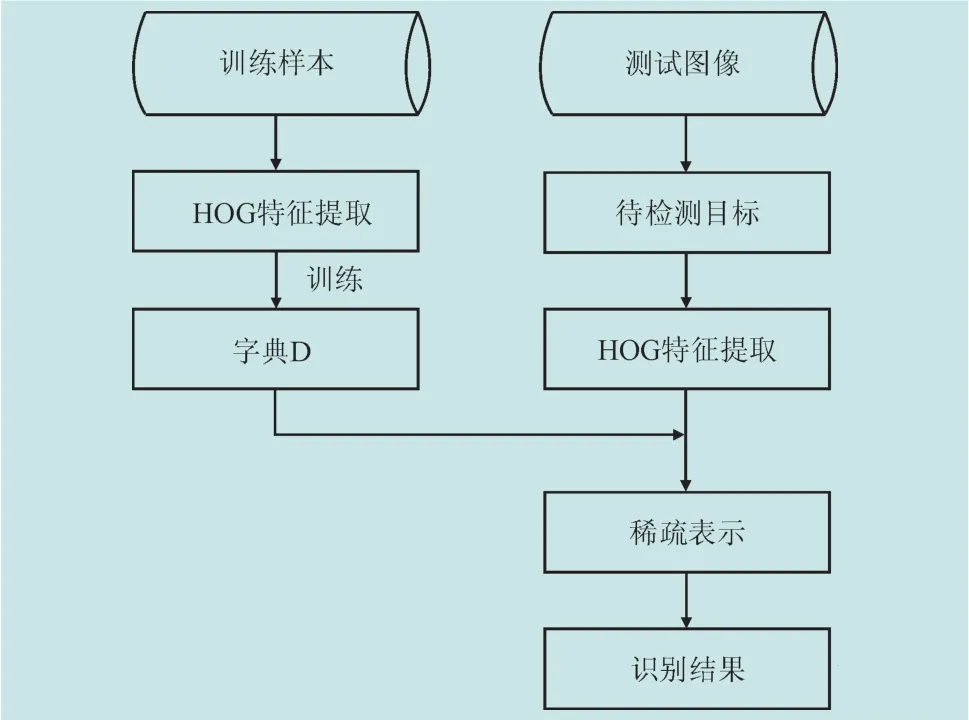
圖1 基于HOG特征和稀疏表示的變電站儀表識(shí)別框架Fig.1 Substation meter identification framework based on HOG features and sparse representation
1 研究方法
1.1 儀表的HOG特征提取
變電站儀表在圖像上的形態(tài)特征具有一定的規(guī)律,其外形一般為圓型或者由于成像角度的原因?qū)е伦冃纬蕶E圓形。然而實(shí)際的拍攝條件下不同的拍攝姿態(tài),光照條件可能不一致,因此在基于圖像信息提取儀表特征時(shí),要求特征向量對(duì)光照等條件具有不敏感性。
Dalal于2005年提出的HOG特征[9]是一種能有效地描述圖像中對(duì)象邊緣信息的描述符,用于描述圖像局部區(qū)域的梯度強(qiáng)度以及梯度方向分布。考慮到HOG特征在計(jì)算過程中是在圖像的局部單元進(jìn)行的,因此受光照變化和噪聲影響較小,具有良好的魯棒性。HOG特征具有良好的表達(dá)圖像中目標(biāo)邊緣信息的能力,因此只要被檢測(cè)物體的形狀具有一定的規(guī)律性,都可以被HOG特征描述,而且HOG特征可以容許被檢測(cè)物體具有一些局部的細(xì)微變化。由于智能變電站中的儀表圖像是在機(jī)器人移動(dòng)過程中拍攝得到的,難免會(huì)產(chǎn)生一定變形,HOG特征能很好地克服變形導(dǎo)致的識(shí)別難的問題,因而HOG特征非常適合作為描述圖像中儀表特征的特征描述子。
圖2描述了一張圖像中儀表的HOG特征提取流程,即將一張圖像劃分為若干個(gè)cells,如圖2(b)所示,相鄰的cell沒有重疊。在每個(gè)cell內(nèi)統(tǒng)計(jì)梯度方向直方圖作為cell的特征descriptor,即將所有梯度方向劃分為9個(gè)bin,作為直方圖的橫軸,角度范圍所對(duì)應(yīng)的梯度值累加值作為直方圖縱軸。但是由于圖像中不同區(qū)域的光照條件等變化多樣,梯度值的變化范圍會(huì)比較大,因此考慮將上下左右相鄰的2×2個(gè)cells組成一個(gè)block整體,如圖2(c)所示,一個(gè)block內(nèi)所有cell的特征descriptor串聯(lián)起來作為該block的特征descriptor,然后標(biāo)準(zhǔn)化每個(gè)block的特征descriptor,這種特征標(biāo)準(zhǔn)化處理使其對(duì)光照變化和陰影有更好的適應(yīng)能力,對(duì)于檢測(cè)率的提高相當(dāng)重要。同時(shí)相鄰block之間要有一定的重疊,這樣可以有效地融入相鄰cell間的空間信息,對(duì)于檢測(cè)結(jié)果有很大幫助。一個(gè)影像內(nèi)所有block的特征descriptor串聯(lián)起來作為最終的用于描述當(dāng)前圖像的特征向量。圖2(d)為將當(dāng)前圖像中每個(gè)cell的特征descriptor平鋪的結(jié)果。

圖2 儀表HOG特征提取流程Fig.2 Meter HOG feature extraction process
圖3中通過場(chǎng)景中不同地物的HOG圖對(duì)比,可以得出HOG特征有效地描述了圖中不同物體的輪廓信息。

圖3 場(chǎng)景中不同地物的HOG圖對(duì)比Fig.3 HOG map comparison of different landmarks in the scene
1.2 基于稀疏表示的儀表識(shí)別
基于稀疏表示[10]的識(shí)別方法可在高維空間對(duì)信號(hào)進(jìn)行重構(gòu),通過重構(gòu)信息的稀疏性判別目標(biāo)分類。稀疏表示是指圖像(或者特征)信息可以完全或者近似地由非常少的一組原子圖像(或者特征)信號(hào)的線性組合表示,而所有的原子圖像(或特征)信號(hào)即組成一個(gè)過完備的字典。假設(shè)訓(xùn)練樣本特征向量集合X=[x1,x2,...,xn]T∈Rn×m,其中xi∈R1×m,i=1,2,...,n,表示第i個(gè)輸入特征向量,m表示輸入特征向量的維數(shù),基向量集合D=[φ1,φ2,...,φK]T∈RK×m,也稱為視覺詞典,其中K表示基向量的個(gè)數(shù)(且K>>m),φj∈R1×m,j=1,2,...,K表示第j個(gè)基向 量 ,,其中i=1,2,...,n對(duì)應(yīng)于第i個(gè)輸入特征向量經(jīng)視覺詞典轉(zhuǎn)化后的向量,對(duì)應(yīng)于第i個(gè)輸入特征向量的線性組合中基向量φj的系數(shù),原理示意圖如圖4所示,也就是說對(duì)于每個(gè)輸入特征向量

圖4 稀疏表示原理示意圖Fig.4 Sparse representation of the principle diagram
圖4中,灰度深淺表示特征向量對(duì)應(yīng)維數(shù)的取值大小,灰度值越大,對(duì)應(yīng)維數(shù)取值越大,白色表示取值為0。
實(shí)際上,可以將稀疏表示中特征向量的求解過程歸結(jié)為求能量函數(shù)最小化的問題,即:

式(1)中,第一項(xiàng)為重構(gòu)誤差項(xiàng),第二項(xiàng)為稀疏懲罰項(xiàng),λ為稀疏系數(shù)。給定訓(xùn)練樣本特征向量集合X,學(xué)習(xí)得到一組“超完備”基向量集合D。訓(xùn)練過程是一個(gè)重復(fù)迭代求解的過程,通過交替更改D和α使得能量函數(shù)最小化。字典的構(gòu)造是一種尋找稀疏表示下最優(yōu)基的構(gòu)造,字典的優(yōu)劣是原始信號(hào)能否盡可能稀疏表示的關(guān)鍵。字典的構(gòu)造不僅要滿足稀疏表示唯一性的約束。
不同類別訓(xùn)練樣本訓(xùn)練的字典對(duì)待測(cè)樣本的稀疏表示能力差別很大,待測(cè)樣本更易被同類別訓(xùn)練樣本得到的字典稀疏表示。根據(jù)稀疏表示的這一特性,研究設(shè)計(jì)了基于稀疏表示的分類器。
記所有基于HOG特征的向量表示儀表訓(xùn)練數(shù)據(jù)集為{Hi∈Rm,i=1,2,...,n},其中每個(gè)樣本Hi表示一個(gè)儀表樣本的HOG特征。初始化字典D=[H1,H2,...,Hn]∈Rmxn,采用S-KSVD算法對(duì)字典進(jìn)行訓(xùn)練得到過完備字典D并計(jì)算稀疏系數(shù),經(jīng)過試驗(yàn)S-KSVD算法可以在較短時(shí)間內(nèi)訓(xùn)練得到重構(gòu)信息PSNR值較高的字典。
設(shè)待檢測(cè)樣本y∈Rm是待識(shí)別目標(biāo)基于HOG特征的向量表示,給定稀疏約束因子L,求解L2范式最小化,如式(2)

式(2)的求解是尋找一個(gè)在滿足稀疏約束因子L條件下取得最小重構(gòu)誤差的稀疏表示的過程。
在式(2)得到最優(yōu)稀疏表示的基礎(chǔ)上,計(jì)算y在字典D上的殘差

此處可通過構(gòu)建包含N類儀表樣本(本文中N=2,即儀表和非儀表兩類)的字典并計(jì)算信號(hào)在各樣本字典上的稀疏表示殘差

最后通過比較殘差值,最小殘差所在的類別即為信息的目標(biāo)分類

式中,C(y)表示信號(hào);y是儀表還是非儀表。
2 實(shí)驗(yàn)與分析
為了驗(yàn)證本文提出的基于局部HOG特征的稀疏表達(dá)識(shí)別算法的有效性,在Matlab平臺(tái)、Intel P42.33GHz、2GB內(nèi)存的計(jì)算機(jī)上,采用實(shí)際場(chǎng)景拍攝的智能變電站場(chǎng)景的儀表數(shù)據(jù)進(jìn)行試驗(yàn)并對(duì)部分實(shí)驗(yàn)結(jié)果做定性和定量的分析和評(píng)價(jià)。
在HOG特征提取的單元和塊的選擇上,過小的單元、塊和直方圖bin導(dǎo)致計(jì)算量的指數(shù)增加,過大則會(huì)對(duì)目標(biāo)特征描述不清,需選擇折中的參數(shù)作為本方法的使用參數(shù)。表1為實(shí)驗(yàn)選擇不同的參數(shù)及相應(yīng)的識(shí)別率。

表1 不同HOG特征參數(shù)及相應(yīng)的識(shí)別率Tab.1 Different HOG characteristic parameters and the corresponding recognition rate
通過表1對(duì)比,當(dāng)HOG特征采用15*15像素/單元,2*2單元/塊,9個(gè)直方圖bin時(shí)的識(shí)別率較高。因此本文使用第二組參數(shù)用于目標(biāo)HOG特征提取。
部分實(shí)驗(yàn)結(jié)果如圖5所示,對(duì)于部分實(shí)驗(yàn)場(chǎng)景而言,如圖5(a)-(c)場(chǎng)景中不存在類似儀表邊緣的這種圓型結(jié)構(gòu),本文提出的模型具有較為理想的識(shí)別結(jié)果,然而對(duì)于較為復(fù)雜的實(shí)驗(yàn)場(chǎng)景(如圖5(d)-(f)),場(chǎng)景中存在較多類似儀表外形的圓型結(jié)構(gòu)導(dǎo)致算法的識(shí)別效率較低。

圖5 部分實(shí)驗(yàn)結(jié)果Fig.5 Some experimental results
為驗(yàn)證基于稀疏表示的識(shí)別方法的有效性,本文將本方法與文獻(xiàn)[15-16]的識(shí)別方法進(jìn)行比較。實(shí)驗(yàn)對(duì)于文獻(xiàn)[15]選用不變矩圖像匹配的方法進(jìn)行實(shí)驗(yàn),對(duì)于文獻(xiàn)[16]選用HOG+SVM是用于圖像中目標(biāo)識(shí)別的典型方法,因此本文也將這種方法作為對(duì)比方法。圖6是3種方法在不同場(chǎng)景下的儀表識(shí)別率,其中最佳場(chǎng)景是指正對(duì)儀表拍攝并且不存在遮擋情況下的識(shí)別結(jié)果。由圖6可看出本文車輛識(shí)別方法在多場(chǎng)景下都具有較好的識(shí)別效果。
圖7給出了文獻(xiàn)[16]中使用SVM分類法與本文使用SRC法的平均識(shí)別率的比較。從中可看出:SRC方法在特征數(shù)大于1 000時(shí)識(shí)別準(zhǔn)確率高于SVM分類法,在一定程度上也說明稀疏表示分類隨著特征維數(shù)的增加保持相應(yīng)的收斂性,SVM分類法則會(huì)隨著特征維數(shù)的增加趨于發(fā)散,而且SVM分類法的分類能力很大程度上取決于特征選取方法。

圖6 多場(chǎng)景下不同方法識(shí)別結(jié)果比較Fig.6 Comparison of different methods in multi-scene recognition results
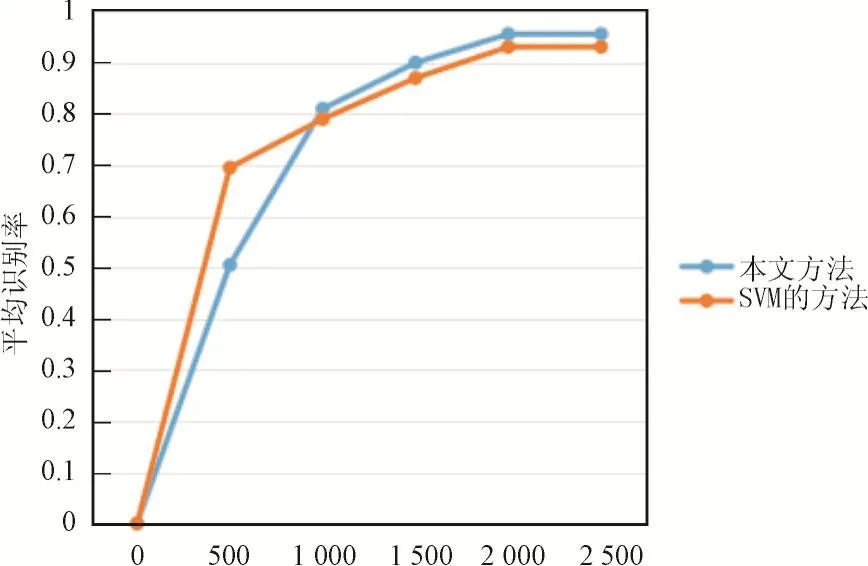
圖7 本文方法與使用SVM方法識(shí)別結(jié)果比較Fig.7 The method in this paper is compared with the method of SVM
3 結(jié)語
本文通過研究稀疏表示理論,將稀疏表示中的分類方法引入到變電站的儀表識(shí)別中,采用不變性較好的方向梯度直方圖對(duì)目標(biāo)進(jìn)行特征提取。與傳統(tǒng)方法不同的是,本方法從信號(hào)特征的稀疏性角度,在高維空間對(duì)信號(hào)進(jìn)行重構(gòu),通過重構(gòu)信號(hào)的稀疏性判別目標(biāo)分類。下一步工作將圍繞進(jìn)一步提高使用稀疏表示對(duì)于目標(biāo)識(shí)別分類方法的計(jì)算速度和穩(wěn)健性(如在高清視頻中的處理以及更多角度對(duì)儀表識(shí)別),并且可以嘗試通過稀疏字典具體儀表類型以及儀表位置識(shí)別后的讀數(shù)。
[1] 張靖.變電站設(shè)備巡檢移動(dòng)機(jī)器人的研究與設(shè)計(jì)[D].保定:華北電力大學(xué)(河北),2010.
[2] 楊作梁,楊森.利用電力變壓器損耗為變電站房屋供暖探索[J].節(jié)能技術(shù),2015,33(6):559-561.YANG Zuoliang,YANG Sen.Research on the Substation Buildings Heating Using Power Transformer Loss[J].Ener?gy Conservation Technology,2015,33(6):559-561.
[3] 王學(xué)偉,于鍇峰,王琳.紅外圖像鎖相濾波去噪算法的研究[J].電測(cè)與儀表,2008,45(6):42-46.WANG Xuewei,YU Kaifeng,WANG Lin.Research on the Locked Filter Denoising Algorithm of Infrared Images[J].Electrical Measurement&Instrumentation.2008,45(6):42-46.
[4] HEGT H A,DE L H R J,KHAN N A.A high perfor?mance license plate recognition system[C]//IEEE Interna?tional Conference on Systems,Man,and Cybernetics.IEEE Xplore,2015:4357-4362 vol.5.
[5] 朱顥東,李紅嬋.基于特征加權(quán)模糊模板匹配的字符識(shí)別[J].蘭州理工大學(xué)學(xué)報(bào),2013,39(1):68-71.ZHU Haodong,LI Hongchan.Character recognition based on feature weighted fuzzy template matching[J].Journal of Lanzhou University of Technology.2013,39(1):68-71.
[6] 李秀君,黃山,李寧,等.一種新的傾斜印刷體字符的校正方法[J].微計(jì)算機(jī)信息,2009,25(21):259-260.LI Xiujun,HUANG Shan,LI Ning,et al.A New Method for Correcting Inclined Printed Characters[J].Microcomput?er Information,2009,25(21):259-260.
[7] 王瑞,李琦,方彥軍.一種基于改進(jìn)角度法的指針式儀表圖像自動(dòng)讀數(shù)方法[J].電測(cè)與儀表,2013,50(11):115-118.WANG Rui,LI Qi,F(xiàn)ANG Yanjun.A kind of automatic reading method of pointer instrument image based on im?proved angle method[J].Measurement&Instrumentation.2013,50(11):115-118.
[8] 李學(xué)聰,汪仁煌,唐蘇湘,等.指針式儀表圖像的六步預(yù)處理方法[J].電測(cè)與儀表,2012,49(12):28-31.LI Xuecong,WANG Renhuang,TANG Suxiang,et al.Six-step preprocessing method of pointer instrument images[J].Measurement&Instrumentation.2012,49(12):28-31.
[9] DALAL N,TRIGGS B,2005.Histograms of Oriented Gradients for Human Detection.IEEE Conference on Computer Vision&Pattern Recognition,pp.886-893.
[10]MAIRAL J,ELAD M,SAPIRO G.Sparse Representation for Color Image Restoration[J].IEEE Transactions on Image Processing A Publication of the IEEE Signal Processing Society,2008,17(1):53.
[11]RUBINSTEIN R,ZIBULEVSKY M,ELAD M.Double Sparsity:Learning sparse dictionaries for sparse signal ap?proximation[J].IEEE Transactions on Signal Processing,2010,58(3):1553-1564.
[12]周戈,曾智.采用不變矩圖像匹配與直方圖的儀表識(shí)別算法[J].華僑大學(xué)學(xué)報(bào)(自然版),2017,38(2):225-228.ZHOU Ge,ZENG Zhi.Instrument identification algorithm using invariant moment image matching and histogram[J].Journal of Huaqiao University(Natural Science).2017,38(2):225-228.
[13]岳國義,李寶樹,趙書濤.智能型指針式儀表識(shí)別系統(tǒng)的研究[J].儀器儀表學(xué)報(bào),2003,24(z2):430-431.YUE Guoyi,LI Baoshu,ZHAO Shutao.Research on IntelligentPointerInstrumentRecognition System[J].Chinese Journal of Scientific Instrument.2003,24(z2):430-431.
[14]李治瑋,郭戈.一種新型指針儀表識(shí)別方法研究[J].微計(jì)算機(jī)信息,2007,23(31):113-114.LI Zhiwei,GUO Ge.Research on a New Pointer Instru?ment Identification Method[J].Microcomputer Information.2007,23(31):113-114.
[15]SUN Z,BEBIS G,MILLER R.On-road vehicle detection using evolutionary Gabor filter optimization[M].IEEE Press,2005.
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
電子制作(2018年8期)2018-06-26 06:43:34
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
電子制作(2017年8期)2017-06-05 09:36:15
現(xiàn)代工業(yè)經(jīng)濟(jì)和信息化(2016年5期)2016-05-17 05:35:57
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
河南電力(2015年5期)2015-06-08 06:01:45
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56