基于PLC的簡易停車場控制系統設計
2018-01-29 02:03:20陳壽坤鄭清蘭
韶關學院學報
2017年12期
關鍵詞:設計
陳壽坤,鄭清蘭
(閩南理工學院實踐教學中心,福建石獅362700)
“開車容易停車難”已成為各場所及居住小區較為突出的問題.對中小城市各種場所及小區停車場進行分析,發現早期的停車場都是平面建設,占地面積較大,能容納車的數量較少,導致目前大部分停車場車位都不夠用,造成了路邊隨意停車等現象,既占用了人們出行的通道又給生活帶來一定的困擾.我國當前使用的智能車庫存在存取麻煩、結構復雜等問題.從國外進口的產品價格貴,使用者交的費用較多,不被市場看好.設計立體的并適合我國大眾能接受的停車場成為當前的緊要任務.建立立體、智能的停車場是解決當前問題的根本.本文設計的智能立體停車場,集電學、光學與計算機科學為一體,并采用PLC為核心控制,實現了停車場從地面向空中發展,使得停車場的占地面積減小,停車場的容量變大.采用PLC實現較為可靠,且體積小,維護方便,可擴展的空間大[1].
1 立體停車場結構及原理
立體停車系統結構示意圖見圖1,整個結構主要是地上3層,每層2行3列共14個車輛存放位.整個裝置主要有框架、載車板、移動裝置、檢測及報警裝置等組成.
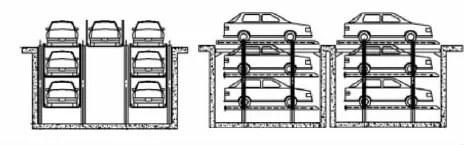
圖1 立體停車系統結構
框架設計采用鋼結構,由鋼鑄成各種不同的形狀,包括外部支撐柱、橫梁、豎梁等.通過不同的螺栓組裝面成.
移動系統主要通過不同的電動機拖動來實現載車板的上升下降、左右移、前后移運動.其中上升和下降由一臺電動機控制,電動機正轉則載車板上升,反轉則下降;……
登錄APP查看全文
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04