主動(dòng)自導(dǎo)水下航行器的高分辨寬帶信號(hào)檢測(cè)技術(shù)
2018-02-07 05:45:14許則富張紹陽
艦船電子工程 2018年1期
許則富 張紹陽
(中國船舶重工集團(tuán)公司七五〇試驗(yàn)場(chǎng) 昆明 650051)
1 引言
主動(dòng)自導(dǎo)水下航行器是具有自我航行能力、主動(dòng)探測(cè)和目標(biāo)搜索的水下的航行體,常見的如魚雷、水下載人航行器以及無人水下航行器等。主動(dòng)自導(dǎo)水下航行器能夠完成水下勘探、偵測(cè)甚至是軍事上的進(jìn)攻防守等任務(wù),特別是魚雷等攻擊性的水下航行器能實(shí)現(xiàn)主動(dòng)搜索目標(biāo)、控制雷體接近目標(biāo)并攻擊摧毀目標(biāo)的功能,水下航行器在海洋開發(fā)、軍事作戰(zhàn)以及情報(bào)搜集等領(lǐng)域都具有很好的應(yīng)用價(jià)值[1]。
主動(dòng)自導(dǎo)水下航行器的目標(biāo)識(shí)別過程是通過發(fā)射主動(dòng)脈沖進(jìn)行回波探測(cè)的過程,航行器發(fā)射主動(dòng)聲吶或者電磁脈沖信號(hào),通過目標(biāo)回波發(fā)射進(jìn)行信號(hào)檢測(cè)和目標(biāo)識(shí)別,然而由于水下背景復(fù)雜,海水混響等干擾影響較大,導(dǎo)致對(duì)目標(biāo)回波信號(hào)的檢測(cè)準(zhǔn)確性不好,水下航行器的目標(biāo)檢測(cè)是建立在高分辨波達(dá)方向(DOA)估計(jì)方法基礎(chǔ)上的[2],傳統(tǒng)方法中,對(duì)目標(biāo)回波寬帶信號(hào)檢測(cè)方法主要有FFT檢測(cè)方法、小波分析方法、分?jǐn)?shù)階傅里葉變換檢測(cè)方法等[3-5],以局部平穩(wěn)高斯色噪聲混響模型為測(cè)試訓(xùn)練樣本信號(hào),結(jié)合相應(yīng)的時(shí)頻處理方法進(jìn)行信號(hào)檢測(cè),取得了較好的檢測(cè)性能,但上述方法在強(qiáng)干擾背景下的檢測(cè)準(zhǔn)確性不好,特別是對(duì)水下航行器目標(biāo)回波寬帶信號(hào)檢測(cè)的分辨率不高。
針對(duì)上述問題,本文提出一種基于自小波變換的主動(dòng)自導(dǎo)水下航行器的高分辨寬帶信號(hào)檢測(cè)技術(shù),首先構(gòu)建主動(dòng)自導(dǎo)水下航行器的回波信號(hào)模型,在海水混響干擾下采用自相關(guān)匹配濾波器進(jìn)行信號(hào)濾波處理,對(duì)濾波輸出的寬帶信號(hào)采用自小波變換進(jìn)行時(shí)頻分解,然后對(duì)水下航行器的回波探測(cè)信號(hào)作WVD-Hough變換,采用二維譜峰搜索方法實(shí)現(xiàn)高分辨的目標(biāo)信號(hào)檢測(cè)。最后進(jìn)行仿真實(shí)驗(yàn),展示了本文方法的優(yōu)越性能。
2 寬帶信號(hào)模型及信號(hào)濾波預(yù)處理
2.1 寬帶信號(hào)模型構(gòu)建
為了實(shí)現(xiàn)對(duì)主動(dòng)自導(dǎo)水下航行器的目標(biāo)識(shí)別和信號(hào)檢測(cè),首先構(gòu)建目標(biāo)回波模型,假設(shè)水下航行器的發(fā)射平臺(tái)與主動(dòng)存在相對(duì)運(yùn)動(dòng)的情形下,主動(dòng)自導(dǎo)水下航行器看作為一個(gè)勻速運(yùn)動(dòng)點(diǎn)目標(biāo),得到水下航行器發(fā)射脈沖信號(hào)后寬帶回波模型為

其中,f(t)為水下航行器的主動(dòng)脈沖發(fā)射信號(hào),s=(c-v)/(c+v)為回波信號(hào)時(shí)延尺度,表征了水下航行器發(fā)射信號(hào)的伸縮變化;τ=2R c,R為發(fā)射主動(dòng)脈沖與打擊目標(biāo)之間的徑向距離, s是歸一化因子。
采用平方可積函數(shù)y(t)作為基函數(shù),利用小波函數(shù)族ψa,b作為母小波,對(duì)發(fā)射的寬帶信號(hào)進(jìn)行自適應(yīng)分離,其中ψ(t)的連續(xù)小波變換為

小波函數(shù)族ψa,b是由ψ(t)經(jīng)過如下仿射變換得到

其中,因子1 ||a保證了寬帶目標(biāo)模型與小波變換之間的關(guān)聯(lián)性,復(fù)雜運(yùn)動(dòng)目標(biāo)回波在一段短的時(shí)間里,常可用LFM作為其一階近似,使得該酉變換的能量歸一化。
將發(fā)射信號(hào) f(t)作為母小波函數(shù)ψ(t),并作變量代換a=1 s,b=τ,當(dāng)目標(biāo)回波發(fā)射系統(tǒng)與目標(biāo)之間有相對(duì)運(yùn)動(dòng),得到:

根據(jù)上式可見,寬帶目標(biāo)模型與小波變換有緊密的內(nèi)在聯(lián)系,可以根據(jù)采集的寬帶目標(biāo)回波模型,對(duì)目標(biāo)進(jìn)行檢測(cè)、跟蹤和成像處理。
2.2 信號(hào)濾波預(yù)處理
在海水混響干擾下采用自相關(guān)匹配濾波器進(jìn)行信號(hào)濾波處理[6],海水混響采用正弦調(diào)頻信號(hào)表示,混響的瞬時(shí)頻率為時(shí)間的正弦函數(shù):

式中β為正弦調(diào)頻周期參數(shù),K為正弦調(diào)頻幅度參數(shù),K=B/2,B為多普勒調(diào)制帶寬。
在高信噪比條件下,使用SFM信號(hào)表示目標(biāo)回波的寬帶信號(hào),其復(fù)指數(shù)形式為

設(shè)T為混響持續(xù)時(shí)間,水下航行器探測(cè)脈寬為Tp,分段數(shù)據(jù)段寬度TB。考慮信號(hào)的時(shí)間散布性和局部平穩(wěn)性,輸入脈沖信號(hào)的寬度TB必須與需檢測(cè)信號(hào)的脈寬Tp相當(dāng),且TB>TP,對(duì)非平穩(wěn)時(shí)變信號(hào)進(jìn)行時(shí)頻分析,相鄰數(shù)據(jù)段的偏移量?T≤TB-Tp。對(duì)數(shù)據(jù)進(jìn)行分段后,對(duì)第k+1段信號(hào)進(jìn)行匹配濾波,構(gòu)造匹配濾波器如圖1所示。
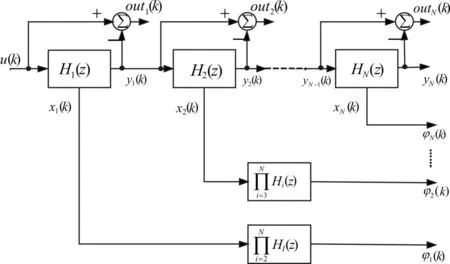
圖1 自相關(guān)匹配濾波器
其中,濾波器的系統(tǒng)傳遞函數(shù)為

式中τ'為一未知量。將實(shí)信號(hào)s(t)轉(zhuǎn)變?yōu)閺?fù)信號(hào)z(t),在近場(chǎng)源中采用時(shí)間、相位和速度等三維參量表示目標(biāo)信號(hào)的標(biāo)量屬性,其元素為

式中,“*”表示復(fù)共軛,把頻率、角度和距離等相互獨(dú)立取值,通過匹配濾波,得到濾波輸出信號(hào)模型為

將其寫為極坐標(biāo)形式:

顯然有:

可見,采用匹配濾波檢測(cè)器進(jìn)行信號(hào)抗干擾處理,提高了信號(hào)的純度,輸出寬帶信號(hào)與給定的實(shí)信號(hào) s(t)=a(t)cosφ(t)相同。
3 信號(hào)檢測(cè)算法實(shí)現(xiàn)
3.1 自小波變換
在構(gòu)建主動(dòng)自導(dǎo)水下航行器的回波信號(hào)模型,海水混響干擾下采用自相關(guān)匹配濾波器進(jìn)行信號(hào)濾波處理的基礎(chǔ)上,進(jìn)行信號(hào)檢測(cè)算法設(shè)計(jì),本文提出一種基于自小波變換的主動(dòng)自導(dǎo)水下航行器的高分辨寬帶信號(hào)檢測(cè)技術(shù),對(duì)濾波輸出的寬帶信號(hào)采用自小波變換進(jìn)行時(shí)頻分解[7],利用調(diào)頻規(guī)律為雙曲函數(shù)進(jìn)行寬帶雙曲調(diào)頻信號(hào)的時(shí)延-尺度耦合,得到:

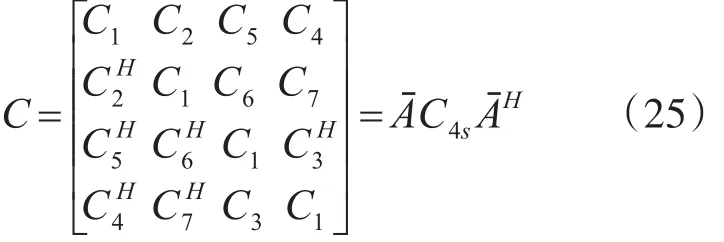
式中,c4si=cum{| si(t)|4}表示水下航行器探測(cè)目標(biāo)信源si的峰度。若用C4S表示母小波函數(shù)的協(xié)方差矩陣,即:

知a(t)≥ | s(t)|,這表示a(t)的曲線“包著”代表|s(t)|的曲線,對(duì)于輸出的寬帶信號(hào),奇異矢量滿足0≤m,n≤P-1,有:

其中,A是一個(gè)維數(shù)為P×L的頻譜正頻流形向量矩陣,通過自小波變換,進(jìn)行信號(hào)的時(shí)頻分解,其第i列矢量可表示為

同理,采用DOA估計(jì)方法,得到水下航行器回波信號(hào)的時(shí)域與頻域一一對(duì)應(yīng)關(guān)系,給出各頻率分量對(duì)應(yīng)的奇異矢量構(gòu)成Φ,Ω,Λ分別為

采用自小波變換得到輸出信號(hào)頻域特征的累計(jì)量矩陣C2,其元素C2(m,n)為

對(duì)于主動(dòng)自導(dǎo)水下航行器的輸出信號(hào),把時(shí)域和頻域組合在一起,得到輸出非平穩(wěn)信號(hào)統(tǒng)計(jì)特征量。
3.2 高分辨寬帶信號(hào)檢測(cè)
對(duì)水下航行器的回波探測(cè)信號(hào)作WVD-Hough變換,取主動(dòng)自導(dǎo)水下航行器高分辨寬帶信號(hào)時(shí)頻特征兩和4階統(tǒng)計(jì)量,計(jì)算表達(dá)式分別為

其中,x(t)是濾波輸出的寬帶信號(hào),Ex是信號(hào)能量,v是算術(shù)中心頻率。
采用二維譜峰搜索方法進(jìn)行高分辨的目標(biāo)信號(hào)檢測(cè)[8],得到矩形包絡(luò)HFM信號(hào)的自小波變換滿足:

對(duì)水下航行器的回波探測(cè)信號(hào)作WVD-Hough變換,寫成矩陣形式:

根據(jù)時(shí)間尺度上的伸縮變化,構(gòu)造如下的4P×4P矩陣:
式中 Aˉ=[AH,(A Λ )H,(A Ω )H,(A Φ)H]H,其瞬時(shí)頻率 fia(t)與母小波瞬時(shí)頻率存在互相關(guān)性,對(duì)其進(jìn)行特征分解:

式中,E=[e1,e2,…e4P]為尺度平移平面上(a,bm)點(diǎn) 處 的 小 波 變 換 酉 矩 陣 ;∑=diag[σ1,σ2,…σ4P]為特征值組成的對(duì)角矩陣,且:

由此得到水下航行器的高分辨寬帶信號(hào)檢測(cè)輸出為

4 仿真實(shí)驗(yàn)與結(jié)果分析
為了測(cè)試本文方法在實(shí)現(xiàn)主動(dòng)自導(dǎo)水下航行器寬帶信號(hào)檢測(cè)中的應(yīng)用性能,進(jìn)行仿真實(shí)驗(yàn),實(shí)驗(yàn)采用Matlab仿真軟件設(shè)計(jì),信號(hào)的形式為矩形包絡(luò)的線性調(diào)頻信號(hào),信號(hào)的時(shí)寬0.01s,相對(duì)帶寬0.4,采樣頻率為196.608kHz,基帶信號(hào)頻率為2~6kHz,選取10倍抽取,采樣頻率降為19.6608kHz,信噪比為SNR=-7dB,根據(jù)上述仿真環(huán)境和參量設(shè)定,進(jìn)行信號(hào)檢測(cè)仿真實(shí)驗(yàn),得到輸入寬帶信號(hào)的時(shí)域波形、頻譜及瞬時(shí)頻率以及濾波輸出信號(hào)如圖2所示。
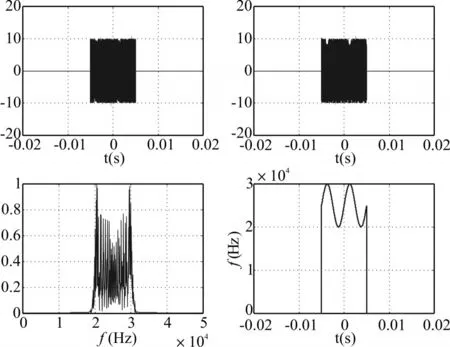
圖2 寬帶信號(hào)的時(shí)域波形、頻譜、濾波輸出及瞬時(shí)頻率
分析圖2得知,采用而本文方法進(jìn)行主動(dòng)水下航行器的回波信號(hào)檢測(cè),采用自相關(guān)匹配濾波器進(jìn)行信號(hào)濾波處理,輸出信號(hào)的分辨能力較高。為了對(duì)比檢測(cè)算法的檢測(cè)性能,采用本文方法和傳統(tǒng)方法進(jìn)行信號(hào)檢測(cè),得到信號(hào)的輸出頻譜圖如圖3所示。
對(duì)比圖3結(jié)果得知,采用本文方法進(jìn)行信號(hào)檢測(cè),對(duì)旁瓣的抑制能力較強(qiáng),輸出信號(hào)頻譜的波束集成能力較好,具有較高的信號(hào)頻譜分辨能力,從而提高了寬帶信號(hào)檢測(cè)的準(zhǔn)確檢測(cè)概率,檢測(cè)性能優(yōu)于傳統(tǒng)方法。
5 結(jié)語
本文研究了主動(dòng)自導(dǎo)水下航行器回波寬帶信號(hào)檢測(cè)技術(shù),提出一種基于自小波變換的主動(dòng)自導(dǎo)水下航行器的高分辨寬帶信號(hào)檢測(cè)技術(shù),構(gòu)建主動(dòng)自導(dǎo)水下航行器的回波信號(hào)模型,在海水混響干擾下采用自相關(guān)匹配濾波器進(jìn)行信號(hào)濾波處理,對(duì)濾波輸出的寬帶信號(hào)采用自小波變換進(jìn)行時(shí)頻分解,對(duì)水下航行器的回波探測(cè)信號(hào)作WVD-Hough變換,采用二維譜峰搜索方法實(shí)現(xiàn)高分辨的目標(biāo)信號(hào)檢測(cè)。研究表明,采用本文方法進(jìn)行主動(dòng)自導(dǎo)水下航行器的寬帶信號(hào)檢測(cè)的準(zhǔn)確檢測(cè)概率較高,抗旁瓣干擾能力較強(qiáng),對(duì)打擊目標(biāo)的具有高分辨識(shí)別能力,在水下目標(biāo)識(shí)別中具有很好的應(yīng)用價(jià)值。
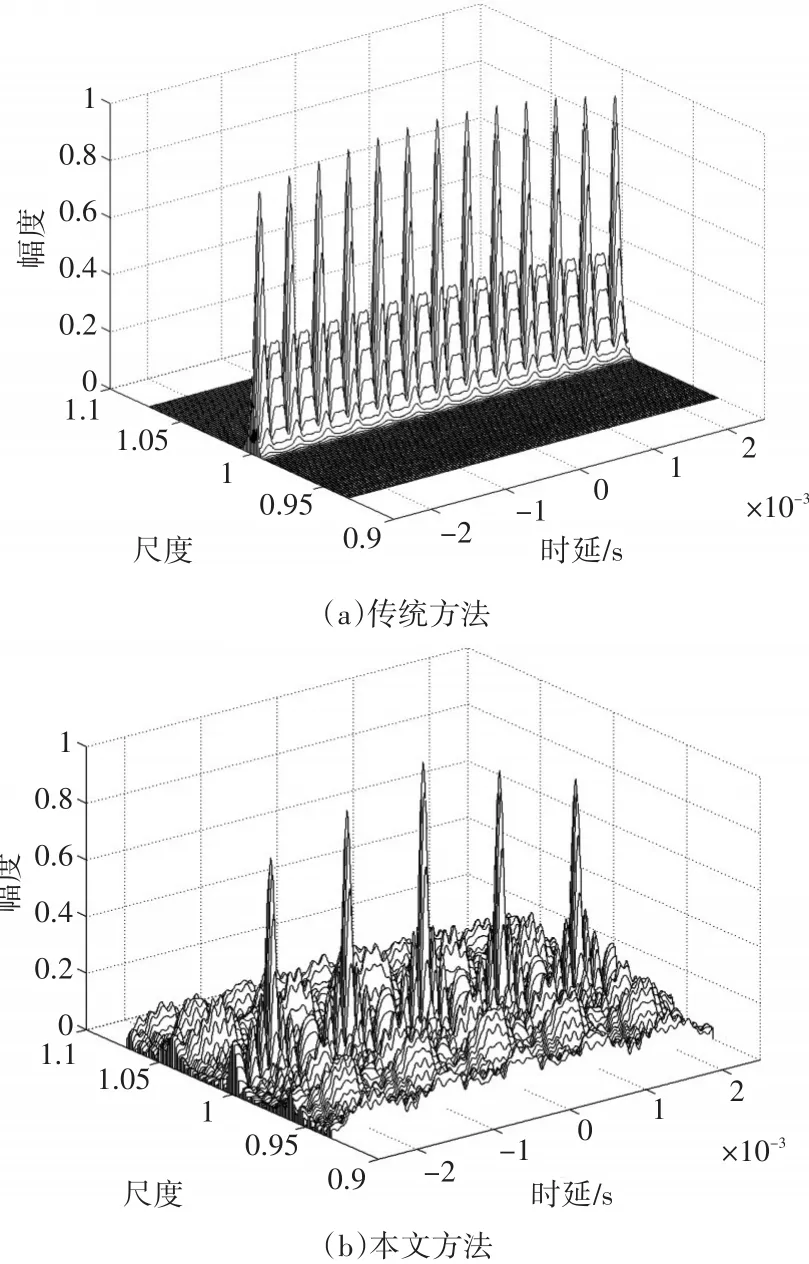
圖3 寬帶信號(hào)檢測(cè)輸出頻譜
[1]王洪迅,王士巖,王星,等.瞬時(shí)測(cè)頻系統(tǒng)的線性調(diào)頻信號(hào)分析及改進(jìn)[J].兵工學(xué)報(bào),2014,35(8):1193-1199.
[2]HEY,ZHANGCS,TANGX M,et al.Coherent integra?tion loss due to pulses loss and phase modulation in pas?sive bistatic radar[J].Digital Signal Processing,2013,23(4):1265-1276.
[3]劉建娟.水下航行器組合導(dǎo)航蔽障控制器的設(shè)計(jì)與實(shí)現(xiàn)[J].艦船科學(xué)技術(shù),2017,39(2A):64-66.
[4]宋軍,劉渝,薛妍妍.LFM-BPSK復(fù)合調(diào)制信號(hào)識(shí)別與參數(shù)估計(jì)[J].南京航空航天大學(xué)學(xué)報(bào),2013,45(2):217-224.
[5]陳雯雯,王亞林,周杰.三維統(tǒng)計(jì)信道中的多普勒效應(yīng)及其信號(hào)分析[J].計(jì)算機(jī)科學(xué),2017,44(3):84-88,131
[6]邸珩燁.基于多徑碼間干擾濾波的短波通信優(yōu)化[J].物聯(lián)網(wǎng)技術(shù),2015,5(10):47-48,52.
[7]鄭振,王麗媛,周勇.混沌理論研究及其在艦船目標(biāo)識(shí)別中的應(yīng)用[J].艦船電子工程,2013,33(5):48-50.
[8]閆源江,胡光波.關(guān)聯(lián)維估計(jì)在艦船輻射噪聲特征提取中 的 應(yīng) 用[J].科 學(xué) 技 術(shù) 與 工 程 ,2010,10(27):6756-6759.
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
