船舶動(dòng)力定位控制系統(tǒng)的非線性觀測(cè)器設(shè)計(jì)
2018-02-07 05:45:15陳勇嘉楊宣訪王永建
艦船電子工程 2018年1期
陳勇嘉 楊宣訪 王永建
(海軍工程大學(xué)電氣工程學(xué)院 武漢 430033)
1 引言
動(dòng)力定位(DP)[1]是指船舶不借助錨泊,僅通過自身安裝的推進(jìn)器來抵抗風(fēng)、浪、流等環(huán)境干擾的影響,實(shí)現(xiàn)其在海面上固定位置或預(yù)期航跡的保持。環(huán)境干擾對(duì)船舶的影響可以分為由風(fēng)、流和二階波浪導(dǎo)致的低頻運(yùn)動(dòng),和由一階波浪導(dǎo)致的高頻運(yùn)動(dòng)。其中高頻運(yùn)動(dòng)只引起船舶的周期性振蕩而不會(huì)造成船體大范圍偏離平衡位置,為避免能量浪費(fèi)和推進(jìn)器磨損,而盡量不響應(yīng)一階波浪、噪聲等高頻振蕩干擾信號(hào)的作用,這就需要根據(jù)傳感器測(cè)量的信息和船舶動(dòng)力定位控制的數(shù)學(xué)模型估計(jì)出船舶的低頻運(yùn)動(dòng)狀態(tài),因此狀態(tài)估計(jì)方法在動(dòng)力定位控制系統(tǒng)的設(shè)計(jì)中具有非常重要地位,是動(dòng)力定位控制系統(tǒng)的關(guān)鍵技術(shù)之一[2]。
DP系統(tǒng)從20世紀(jì)60年代開始應(yīng)用在海洋船舶上,采用了陷波濾波器,其結(jié)構(gòu)簡(jiǎn)單,易于實(shí)現(xiàn),但是會(huì)產(chǎn)生相位滯后,使系統(tǒng)穩(wěn)定性變差。20世紀(jì)80年代后,第二代DP系統(tǒng)中經(jīng)常采用卡爾曼濾波器,該方法的主要缺點(diǎn)是必須將船舶運(yùn)動(dòng)的動(dòng)力學(xué)方程在一些給定的艏搖角度值上線性化,由于系統(tǒng)擁有15個(gè)狀態(tài)變量,所以采用上述方法時(shí)系統(tǒng)在線計(jì)算量大,而且其中的很多協(xié)方差值也很難調(diào)整,不利于實(shí)現(xiàn)[3~5]。
為了避免動(dòng)力定位系統(tǒng)采用上述卡爾曼濾波器時(shí)所帶來的問題,本文設(shè)計(jì)了一種基于無跡卡爾曼濾波器的改進(jìn)算法對(duì)模型中的非線性函數(shù)的概率密度分布進(jìn)行擬合,用一系列確定樣本來逼近狀態(tài)的后驗(yàn)概率密度,而不是對(duì)非線性函數(shù)進(jìn)行線性化近似,因此對(duì)于非線性分布的統(tǒng)計(jì)量具有較高的計(jì)算精度。該濾波器的有效性通過仿真實(shí)驗(yàn)得到了驗(yàn)證。
2 基本的數(shù)學(xué)模型
2.1 船舶低頻運(yùn)動(dòng)方程
船舶在海洋中的運(yùn)動(dòng)有六個(gè)自由度,而水面動(dòng)力定位作業(yè)主要研究船舶的三自由度運(yùn)動(dòng),即縱蕩、橫蕩和艏搖。為描述船舶在水平面的運(yùn)動(dòng),必須建立兩個(gè)坐標(biāo)系統(tǒng)[6~7]:慣性坐標(biāo)系和隨船坐標(biāo)系,如圖1所示,定義向量 η=[x,y,ψ ]T表示慣性坐標(biāo)系下船舶的縱蕩、橫蕩位置和艏搖角度,ν=[u,v,r]T表示隨船坐標(biāo)系下船舶的縱蕩、橫蕩速度和艏搖角速度,兩坐標(biāo)系的相互轉(zhuǎn)換關(guān)系為[8]

式中:轉(zhuǎn)換矩陣
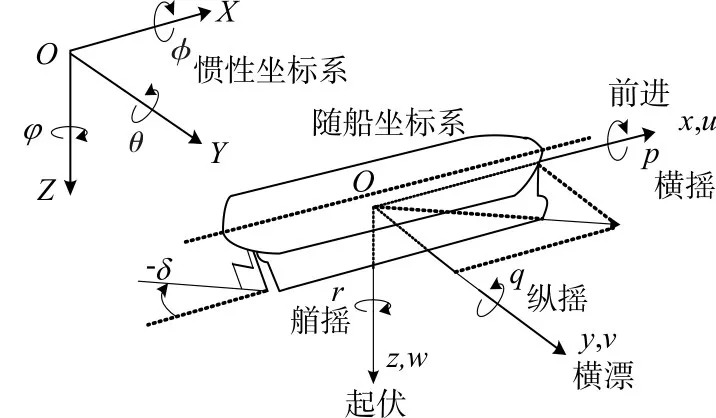
圖1 固定坐標(biāo)系和隨船坐標(biāo)系
由文獻(xiàn)[8]可以得到船舶低速運(yùn)動(dòng)情況下的低頻運(yùn)動(dòng)方程:

式中:M∈R3×3表示系統(tǒng)慣性矩陣,D∈R3×3為線性水動(dòng)力阻尼系數(shù)。τ∈R3表示控制力和力矩,b∈R3表示由風(fēng)、浪、流引起的環(huán)境力,wl∈R3為過程噪聲向量。
2.2 高頻運(yùn)動(dòng)模型
船舶的高頻運(yùn)動(dòng)主要是由于一級(jí)波浪擾動(dòng)引起的,可看作是在縱蕩、橫蕩和艏搖三個(gè)方向上附加了阻尼的二階諧波振蕩器:

式中,參數(shù) ki與海況有關(guān),ζi(i=1,2,3)為相對(duì)阻尼系數(shù),通常取值為 0.05~0.3,w0i(i=1,2,3)為波浪P-M譜中與有義波高相關(guān)的海洋主導(dǎo)角頻率。
將上式轉(zhuǎn)換為狀態(tài)空間形式,可以得到船舶的高頻運(yùn)動(dòng)模型:
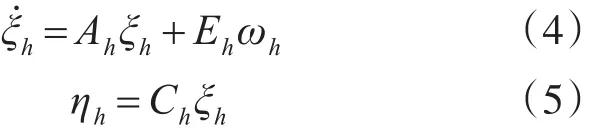
式中 ξh=[ξx,ξy,ξφ,xh,yh,ψh]T
表示船舶在3個(gè)自由度方向上的位置和速度信號(hào);wh為零均值高斯白噪聲,wh=[wxwywφ];ηh為三維列向量,分別表示高頻運(yùn)動(dòng)的縱蕩、橫蕩和艏搖角度;其它系數(shù)為
其中σi(i=1,2,3)為與波浪強(qiáng)度有關(guān)的常數(shù)。
2.3 環(huán)境作用力模型
環(huán)境力通常是指風(fēng)、二階波浪漂力、流對(duì)船舶的作用力。環(huán)境力模型由高斯—馬爾科夫過程表示:

式中:b∈R3表示環(huán)境力和力矩;T為包含時(shí)間常數(shù)的的三維對(duì)角矩陣;Eb∈R3×3為噪聲幅值矩陣;ωb∈R3為零均值高斯白噪聲向量。
2.4 總系統(tǒng)模型
由前面的敘述可得系統(tǒng)的測(cè)量模型:

式中:vy∈R3為零均值高斯白噪聲。
根據(jù)上述模型,綜合得到總的動(dòng)力定位船舶的數(shù)學(xué)模型:

3 非線性估計(jì)濾波器的設(shè)計(jì)
3.1 基本原理
基于無跡卡爾曼濾波的改進(jìn)算法避免了對(duì)非線性系統(tǒng)線性化,而是在估計(jì)點(diǎn)附近進(jìn)行UT變換,使用無跡變換來處理均值和協(xié)方差的非線性傳遞問題,將先驗(yàn)狀態(tài)估計(jì)的Sigma點(diǎn)應(yīng)用到測(cè)量更新中[9]。
3.2 基于無跡卡爾曼濾波的計(jì)算步驟[10]
1)初始化:給定系統(tǒng)狀態(tài)的均值xˉ和方差P。
2)計(jì)算2n+1個(gè)Sigma采樣點(diǎn),這里的n指的是狀態(tài)的維數(shù):
3)計(jì)算這些采樣點(diǎn)相應(yīng)的權(quán)值
式中,小標(biāo)m為均值,c為協(xié)方差,上標(biāo)為第幾個(gè)采樣點(diǎn)。參數(shù)k是一個(gè)縮放比例因數(shù),用來降低總的預(yù)測(cè)誤差,a的選取控制了采樣點(diǎn)的分布狀態(tài),待選參數(shù)β≥0是一個(gè)非負(fù)的權(quán)系數(shù),它可以合并方程中高階項(xiàng)的動(dòng)差,這樣就可以把高階項(xiàng)的影響包括在內(nèi)。
4)時(shí)間更新方程
式中,f(·)表示非線性過程,Qk為過程噪聲在k時(shí)刻的方差。
5)根據(jù)一步預(yù)測(cè)值,再次使用UT變換,產(chǎn)生新的Sigma點(diǎn)集。
6)測(cè)量更新方程
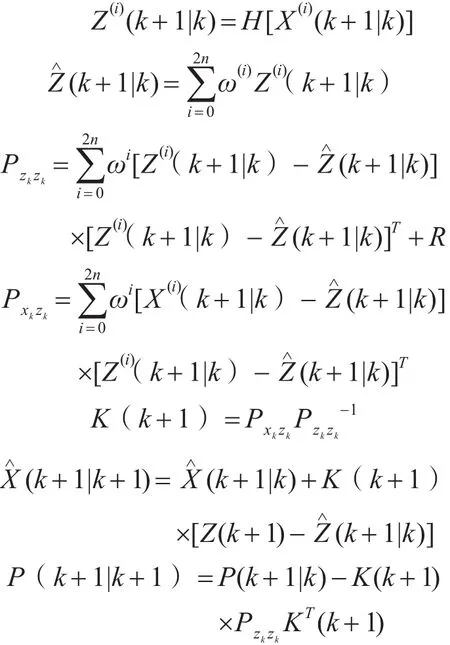
其中,Zk為k時(shí)刻的觀測(cè)值,H為觀測(cè)矩陣,R為測(cè)量噪聲的方差,K為卡爾曼增益。
3.3 基于無跡卡爾曼濾波器的設(shè)計(jì)
3.2 節(jié)中給出了算法流程,要把該算法應(yīng)用到船舶動(dòng)力定位系統(tǒng)中,需要確定算法中的時(shí)間更新方程和測(cè)量更新方程的第一個(gè)式子,這兩個(gè)式子分別與總模型中的狀態(tài)方程和觀測(cè)方程相對(duì)應(yīng),基于無跡卡爾曼的改進(jìn)算法在Matlab(R2013a)/Simu?link中搭建[11]并進(jìn)行仿真實(shí)驗(yàn)。
圖2中,Subsystem子系統(tǒng)是環(huán)境作用力模型,Subsystem1子系統(tǒng)是高頻運(yùn)動(dòng)模型,J和J1是S-function模塊。
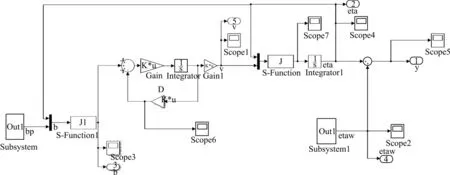
圖2 船舶動(dòng)力定位系統(tǒng)Simulink模型
4 仿真與分析
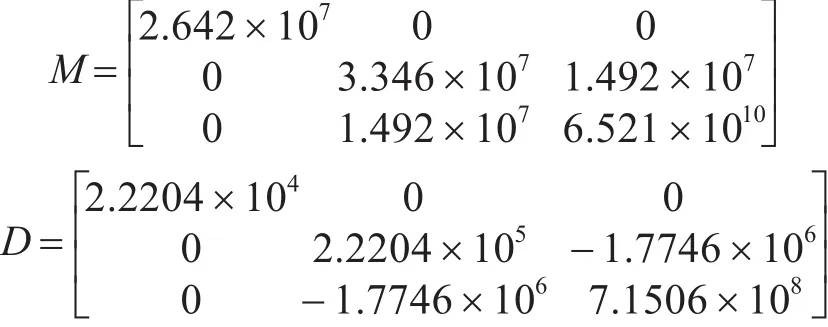
為了驗(yàn)證算法的有效性,對(duì)非線性濾波算法進(jìn)行仿真并與傳統(tǒng)的卡爾曼濾波算法進(jìn)行對(duì)比。本文在MATLAB(R2010a)軟件上進(jìn)行仿真實(shí)驗(yàn),以某動(dòng) 力 定 位 船 舶 為 例[12]:長(zhǎng) L=175(m),重m=2.461×104(kg),慣性矩陣M 和線性阻尼陣 D取值如下:
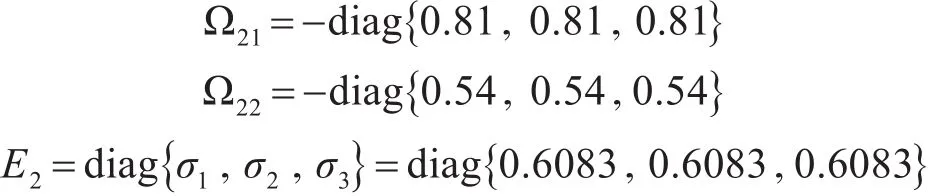
環(huán)境擾動(dòng)作用力模型中的時(shí)間參數(shù)選為:T=diag(1000 1000 1000),波浪主頻率、相對(duì)阻尼系數(shù)和波浪強(qiáng)度為:w0i=0.9,σi=0.6083,ζi=0.3。
所以高頻運(yùn)動(dòng)模型中的系數(shù)矩陣取值為:
仿真時(shí)間為1000s,船舶運(yùn)動(dòng)和無跡卡爾曼濾波器對(duì)船舶縱蕩、橫蕩和艏搖方向位置的濾波效果如圖3~4所示。
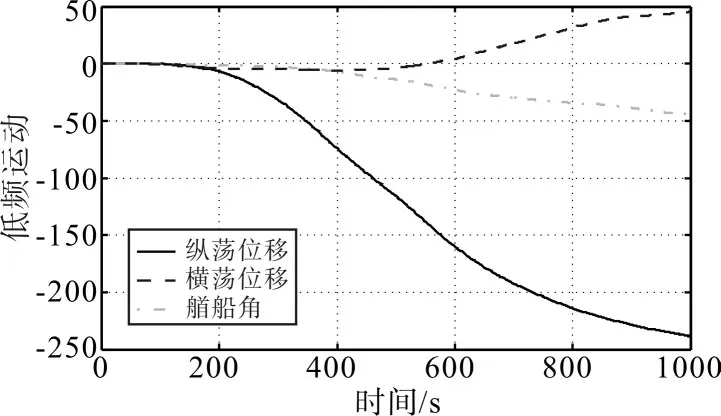
圖3 船舶的低頻運(yùn)動(dòng)
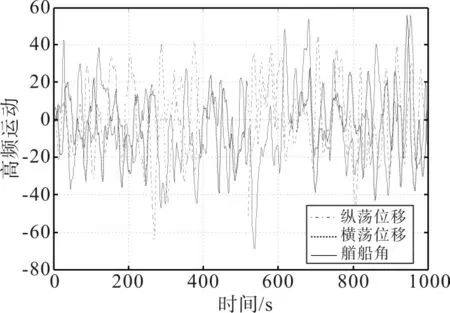
圖4 船舶的高頻運(yùn)動(dòng)
圖5 、圖6和圖7為使用傳統(tǒng)的卡爾曼濾波時(shí),船舶的縱向位移、橫向位移和艏向角的真實(shí)值和估計(jì)值。圖8、圖9和圖10為使用非線性濾波器時(shí),船舶的縱向位移、橫向位移和艏向角的真實(shí)值和估計(jì)值。從仿真結(jié)果可以看出,非線性濾波器從附有噪聲和高頻運(yùn)動(dòng)分量的綜合輸出中能夠較好地濾除高頻運(yùn)動(dòng)部分,圖8~圖10估計(jì)值較好地從真實(shí)值中估計(jì)出,使動(dòng)力定位船舶能夠得到有效的控制,減少不必要的能量損失。
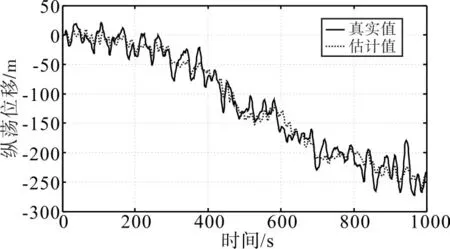
圖5 縱向位移真實(shí)值和估計(jì)值
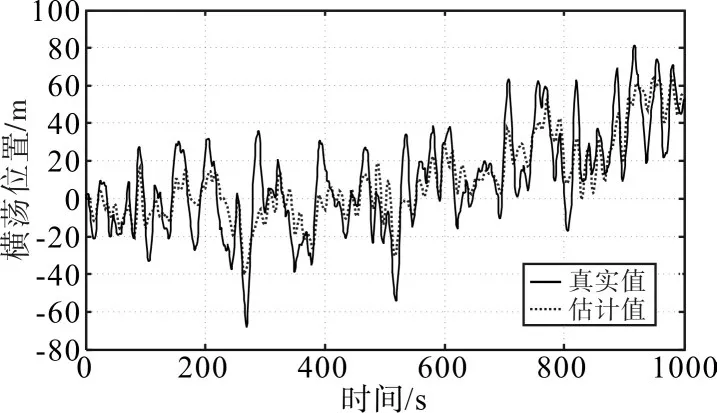
圖6 橫向位移真實(shí)值和估計(jì)值
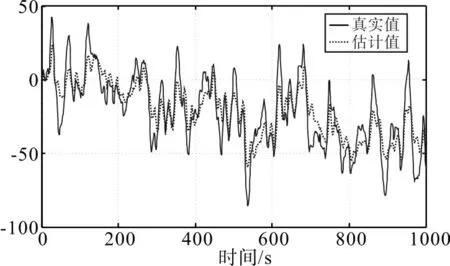
圖7 艏搖方向真實(shí)值和估計(jì)值
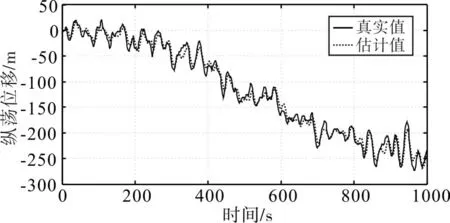
圖8 縱向位移真實(shí)值和估計(jì)值
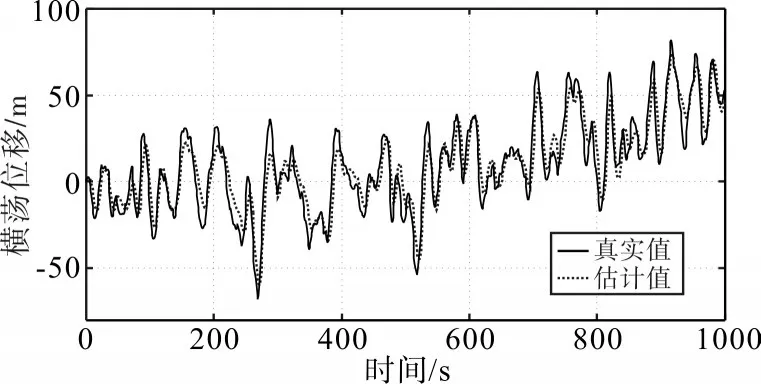
圖9 橫向位移真實(shí)值和估計(jì)值

圖10 艏搖方向真實(shí)值和估計(jì)值
5 結(jié)語
本文針對(duì)船舶動(dòng)力定位控制系統(tǒng)設(shè)計(jì)了一種基于無跡卡爾曼濾波器的非線性觀測(cè)器,該觀測(cè)器的優(yōu)點(diǎn)是摒棄了對(duì)非線性函數(shù)線性化的傳統(tǒng)做法,使用無跡變換來處理均值和協(xié)方差的非線性傳遞問題。仿真結(jié)果表明,該非線性觀測(cè)器可以較好地估計(jì)船舶運(yùn)動(dòng)的各狀態(tài)值,適用于動(dòng)力定位系統(tǒng)。
[1]邊信黔,付明玉,王元慧.船舶動(dòng)力定位[M].北京:科學(xué)出版社,2011:8-10.
[2]Tomera,Miroslaw.Nonlinear observers design for multi?variable ship motion control[J].Polish Maritime Re?search,2012,19(S1):55-56.
[3]Grimble M J,Patton R J,Wise D A.The Design of Dy?namic Ship Positioning Control Systems Using Extended Kalman Filtering Techniques [C]//Oceans, 2011:488-497.
[4]J LI,G xia.The application of an extended Kalman filter in the dynamic positioning system[C]//International Con?ference on Natural Computation,2016:1945-1946.
[5]何黎明,田作華,施頌椒.動(dòng)力定位船舶的非線性觀測(cè)器設(shè)計(jì)[J].上海交通大學(xué)學(xué)報(bào),2003,37(6):964-965.
[6]Bui VP,Ji SW.Nonlinear observer and sliding mode con?trol design for dynamic positioning of a surface vessel[C]// International Conference on Control, 2012:1900-1904.
[7]Du JL,Wang SY,Zhang XK.Nonlinear observer design for ship dynamic positioning system[J].Ship engineer?ing,2012,34(3):307-312.
[8]Thori.Fossen,Tristan Perez.Kalman Filtering for Position?ing and Heading Control of Ships and Offshore Rigs[J].IEEEControl Systems Magazine,2009,29(6):32-46.
[9]丁浩晗,馮輝等,基于自適應(yīng)無跡卡爾曼濾波的動(dòng)力定位估計(jì)狀態(tài)[J].大連海事大學(xué)學(xué)報(bào),2016,42(2):242-246.
[10][美]Dan Simon.最優(yōu)狀態(tài)估計(jì)—卡爾曼,H∞及非線性濾波[M].張勇剛,李寧,奔粵陽,譯.北京:國(guó)防工業(yè)出版社,2013:334-336.
[11]黃小平,王巖.卡爾曼濾波原理及應(yīng)用—MATLAB仿真[M].北京:電子工業(yè)出版社,2015:103-105.
[12]Saelid S,Jenssen N,Balchen J.Design and analysis of a dynamic positioning system based on Kalman filtering and optimal control[J].Automatic Control IEEE Trans?actions on,1983,28(3):331-339.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
