公務(wù)船陣位機(jī)動(dòng)計(jì)算模型研究?
2018-02-07 05:45:21童雪娟馮明奎
艦船電子工程 2018年1期
童雪娟 馮明奎 陳 建
(1.公安海警學(xué)院 寧波 315801)(2.廣東省海警第二支隊(duì) 汕頭 515900)
1 引言
陣位機(jī)動(dòng)是公務(wù)船艇在海上執(zhí)勤和訓(xùn)練時(shí)常用的一種機(jī)動(dòng)方式。公務(wù)船艇為了執(zhí)勤執(zhí)法活動(dòng)的順利展開,需要占領(lǐng)目標(biāo)船的某一有利陣位;執(zhí)勤船艇編隊(duì)在航渡時(shí),擔(dān)任警戒任務(wù)的船艇需要占領(lǐng)基準(zhǔn)船的某一陣位,組成符合戰(zhàn)術(shù)要求的警戒隊(duì)形;如何在海上某一特定區(qū)域進(jìn)行偵查、搜索、巡邏中占領(lǐng)有利陣位或與指揮艇保持陣位,傳統(tǒng)的做法是在艦操圖上人工標(biāo)繪求解。這要求船艇繪算人員具備精湛的技能以及良好的心理素質(zhì),才能快速準(zhǔn)確繪算出正確結(jié)果。但實(shí)際情況中,由于海上環(huán)境的復(fù)雜性、多變性,尤其是在氣象條件惡劣的情況下,導(dǎo)致繪算時(shí)間長(zhǎng)、精度低,難以保證實(shí)時(shí)執(zhí)勤的需要。隨著計(jì)算機(jī)技術(shù)和航海技術(shù)的融合,建立機(jī)動(dòng)數(shù)學(xué)模型,從雷達(dá)上采集目標(biāo)船和本船的運(yùn)動(dòng)要素?cái)?shù)據(jù),用計(jì)算機(jī)實(shí)現(xiàn)自動(dòng)繪算,是一個(gè)解決之道。
2 人工標(biāo)繪法
占領(lǐng)陣位的具體問題可以描述為:已知目標(biāo)船T的航向Ct,航速Vt,機(jī)動(dòng)開始時(shí)T船的方位為B1,距離為D1,機(jī)動(dòng)船(本船)以航速Vo占領(lǐng)目標(biāo)船T舷角Qt,距離D2的陣位。求機(jī)動(dòng)船占領(lǐng)新陣位時(shí)所用的航向Co及所需時(shí)間t。根據(jù)雷達(dá)標(biāo)繪的基本原理,本船真運(yùn)動(dòng)矢量等于目標(biāo)船真運(yùn)動(dòng)矢量與目標(biāo)船相對(duì)運(yùn)動(dòng)負(fù)矢量之和,給定任意兩個(gè)矢量,就可以用作圖法求取一個(gè)未知矢量[1]。只需確定目標(biāo)船初始的相對(duì)位置T1和機(jī)動(dòng)船占領(lǐng)新陣位后目標(biāo)船的新相對(duì)位置T2,由T1位置向T2位置作射線,該射線即為目標(biāo)船相對(duì)于機(jī)動(dòng)船的相對(duì)運(yùn)動(dòng)線,已知目標(biāo)船的速度大小、方向,相對(duì)速度的方向,機(jī)動(dòng)船的速度大小,即可求得機(jī)動(dòng)船的速度方向即為所需的航向Co,以及相對(duì)速度的大小,再量得目標(biāo)兩位置(T1T2)間的相對(duì)航程即可算出所需的航行時(shí)間t。
例O船測(cè)得T船航向Ct=300°.0,航速Vt=15kn。機(jī)動(dòng)開始時(shí)T船的方位B1=240°.0,距離D1=80cab。O船以航速Vo=24kn占領(lǐng)T船舷角Qt=100°左,距離D2=40Cab的陣位。求占領(lǐng)陣位的航向Co及機(jī)動(dòng)所需時(shí)間t。在艦操圖上作圖解算,如圖1所示,具體步驟為:
1)將O船置于艦操圖中心,根據(jù)B1,D1標(biāo)出T船的初始位置T1。再根據(jù)Qt及D2標(biāo)出占領(lǐng)陣位時(shí)T2的位置,連接T1T2得相對(duì)航向線;
2)作速度三角形求占領(lǐng)陣位的航向Co。
速度比例尺3:1,過O點(diǎn)作目標(biāo)船T的速度矢量線OA,過A點(diǎn)作T1T2的平行線AA’,以O(shè)為圓心,以Vo為半徑,畫弧交AA’于B點(diǎn),連接OB,OB即為O船速度矢量,其方向即為O船占領(lǐng)陣位航向;
3)BA則為相對(duì)速度矢量Vr,機(jī)動(dòng)所需時(shí)間t=T1T2/Vr。
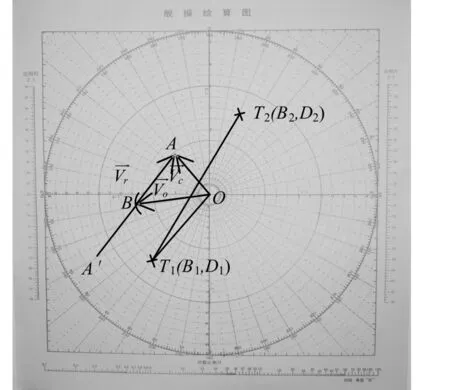
圖1 占領(lǐng)陣位人工標(biāo)繪
3 數(shù)學(xué)模型
1)問題的分析
已知T船的航向Ct,航速Vt,機(jī)動(dòng)開始時(shí)T船的方位、O船測(cè)得的初始陣位及要占領(lǐng)的新陣位B2、D2或Qt、D2,O 船占領(lǐng)陣位機(jī)動(dòng)時(shí)所用航速為 Vo,求O船的航向Co,所用時(shí)間t。由占領(lǐng)陣位機(jī)動(dòng)的原理可得,要求得Co,t只需確定T船的始末位置,再確定相對(duì)航向線,然后根據(jù)幾何學(xué)求出Co,t。
2)占領(lǐng)陣位可能性分析
當(dāng)機(jī)動(dòng)船的航速大于目標(biāo)船的航速(Vo>Vt),可以占領(lǐng)目標(biāo)船的任何陣位,但當(dāng)機(jī)動(dòng)船的航速不超過目標(biāo)船的航速時(shí)(Vo≤Vt),機(jī)動(dòng)船所能占領(lǐng)的范圍是一定的[2]。下面討論Vo≤Vt時(shí)可占領(lǐng)陣位的范圍:假設(shè)目標(biāo)船T航向?yàn)镃t,航速為Vt,機(jī)動(dòng)船(本船)航速為Vo,求機(jī)動(dòng)船能占領(lǐng)目標(biāo)船T的范圍。機(jī)動(dòng)船O點(diǎn)置于直角坐標(biāo)原點(diǎn),目標(biāo)船初始位置為T1,以T1為圓心,以 Vo為半徑作圓;過 T1作目標(biāo)船速度負(fù)矢量Vt,從Vt負(fù)矢量端點(diǎn)作Vo速度圓的切線AB、AC,則∠BAC所包含(小于180°)的扇面就是所求的可占領(lǐng)陣位范圍,如圖2所示。從圖中可以看出,∠T1AB=∠T1AC=Qc,Qc=arcsin(Vo/Vt)。機(jī)動(dòng)船所能占領(lǐng)目標(biāo)船的陣位范圍是兩倍的Qc組成的扇面。
3)模型的建立
將機(jī)動(dòng)船O點(diǎn)置于直角坐標(biāo)原點(diǎn),標(biāo)繪初始陣位T1、擬占領(lǐng)陣位點(diǎn)T2,如圖3所示。
Bt1=B1+180,其中Bt1>360時(shí),需要減去360
Bt2=B2+180,其中Bt2≥360時(shí),需要減去360
T1= (D1sin B1,D1cos B1),
T2= (D2sin B2,D2cos B2);
其中B2已知或Qt已知;
若 Qt已知,則 B2=Ct+Qt+180,其中B2>360時(shí),需要減去360。
由幾何圖形可知相對(duì)航向線T1T2的斜率:K=(D1cos Bt1-D2cos Bt2)/(D1sin Bt1-D2sin Bt2)。
相對(duì)航向Cr1=90-arctan k,這個(gè)公式只能確定相對(duì)航向在一、四象限的大小,而當(dāng)相對(duì)航向在二、三象限時(shí),即 D2cos Bt2<D1cos Bt1且0<Cr1<90時(shí) ,Cr2=180+Ct1;D2cos Bt2>D1cos Bt1且90<Cr1<180時(shí),Cr2=180+Ct1。
P為Cr和Ct的夾角 P=|Cr-Ct|,
X為Co和Cr的夾角 X=arcsin(Vt/Vo×sin P),
由幾何圖形可得機(jī)動(dòng)船的航向Co=Cr+X+180,
Vr為相對(duì)速度

s為相對(duì)航程

t為所用時(shí)間t=s/Vr×60。
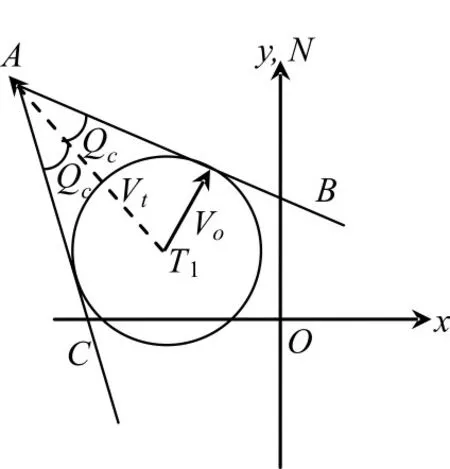
圖2 占領(lǐng)陣位可能性分析

圖3 速度矢量關(guān)系
船艇陣位機(jī)動(dòng)中的變換機(jī)動(dòng)是指機(jī)動(dòng)艦由原來的陣位變換到同一目標(biāo)艦的另一新陣位點(diǎn)的機(jī)動(dòng)。保持陣位機(jī)動(dòng)是指目標(biāo)艦轉(zhuǎn)向以后,機(jī)動(dòng)艦需要保持原來的陣位而進(jìn)行的機(jī)動(dòng)。這兩種方法與占領(lǐng)陣位在本質(zhì)上是一致的[3]。因此,上述數(shù)學(xué)模型同樣適用于變換陣位機(jī)動(dòng)與保持陣位機(jī)動(dòng)。
4 編程實(shí)現(xiàn)
根據(jù)計(jì)算模型,利用MatLab語言編程實(shí)現(xiàn)占領(lǐng)陣位自動(dòng)繪算,軟件功能包括六個(gè)模塊:比例尺選擇,機(jī)動(dòng)類型選擇,參數(shù)輸入,自動(dòng)解算、分步解算、結(jié)果輸出。軟件界面如圖4所示。用戶在打開軟件后,首先要對(duì)機(jī)動(dòng)的類型進(jìn)行選擇,并根據(jù)不同的機(jī)動(dòng)方式輸入數(shù)據(jù),選擇合適的比例尺,計(jì)算機(jī)自動(dòng)進(jìn)行繪算,并輸出繪算結(jié)果,結(jié)果包括數(shù)據(jù)和圖形,也可根據(jù)需要進(jìn)行分步解算。其中比例尺和輸入?yún)?shù)沒有先后順序。
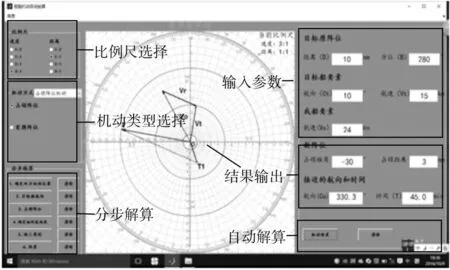
圖4 自動(dòng)繪算界面
比例尺模塊分為速度比例尺與距離比例尺,可以根據(jù)數(shù)據(jù)的大小,由人工選擇,選擇不同的比例尺,本系統(tǒng)提供四種比例尺:2:1、1:1、1:2、1:3。
機(jī)動(dòng)類型選擇模塊提供了三種占領(lǐng)陣位方式:占領(lǐng)陣位機(jī)動(dòng)、變換陣位機(jī)動(dòng)、保持陣位機(jī)動(dòng)。根據(jù)任務(wù)需求選擇機(jī)動(dòng)方式,當(dāng)選定一種機(jī)動(dòng)方式后,系統(tǒng)就進(jìn)入該機(jī)動(dòng)模式,進(jìn)行該機(jī)動(dòng)方式的繪算。
參數(shù)輸入模塊根據(jù)選擇的機(jī)動(dòng)方式,由人工輸入機(jī)動(dòng)船和目標(biāo)船的初始數(shù)據(jù),計(jì)算機(jī)判斷輸入?yún)?shù)是否有效。
自動(dòng)繪算模塊根據(jù)計(jì)算模型實(shí)現(xiàn)占領(lǐng)陣位,變換陣位、保持陣位自動(dòng)繪算,解算流程如圖5所示。
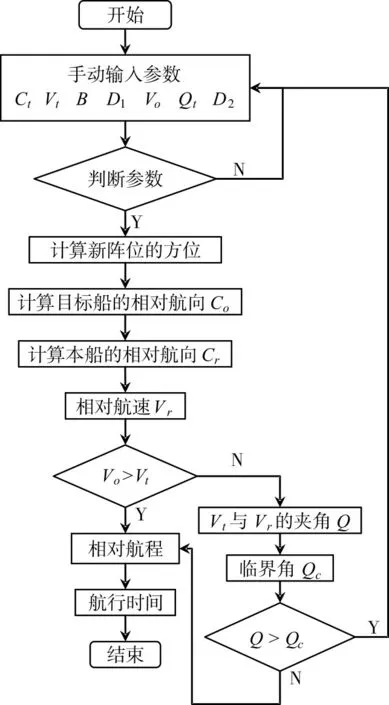
圖5 占領(lǐng)陣位自動(dòng)繪算流程圖
分步解算模塊是根據(jù)圖解法的求解過程,把自動(dòng)繪算分為確定目標(biāo)船原航向、目標(biāo)船原陣位、目標(biāo)需占領(lǐng)陣位、確定相對(duì)運(yùn)動(dòng)線、做速度三角形五個(gè)步驟完成,主要用于教學(xué)的需要。
結(jié)果輸出提供了數(shù)據(jù)結(jié)果和圖形結(jié)果輸出。數(shù)據(jù)結(jié)果是為用戶提供相應(yīng)的數(shù)據(jù)支持。圖形結(jié)果是顯示自動(dòng)匯算后所形成的相對(duì)三角形等相關(guān)圖形和參數(shù),讓用戶更直觀地了解,當(dāng)前船艇與目標(biāo)之間的位置關(guān)系、對(duì)峙情況和運(yùn)動(dòng)趨勢(shì)。
5 結(jié)語
通過采取50個(gè)繪算實(shí)例作為樣本計(jì)算自動(dòng)繪算時(shí)間,得到平均繪算時(shí)間為1.2s,遠(yuǎn)遠(yuǎn)小于傳統(tǒng)的人工艦操圖繪算。自動(dòng)繪算軟件具有繪算速度快、繪算精度高的特點(diǎn)。為了方便教學(xué)與訓(xùn)練,增加了分步繪算顯示與輸出功能,有助于學(xué)員理解繪算過程。下一步,需要研究雷達(dá)數(shù)據(jù)人工錄取實(shí)現(xiàn)方法,減少人工輸入?yún)?shù)的時(shí)間,從而實(shí)現(xiàn)繪算完全自動(dòng)化。
[1]祝建國,翁建軍.雷達(dá)觀測(cè)與標(biāo)繪[M].武漢:武漢理工大學(xué)出版社,2010.
[2]趙學(xué)軍.雷達(dá)操作與應(yīng)用[M].大連:大連海事大學(xué)出版社,2015.
[3]王金堂,李永進(jìn).艦船戰(zhàn)術(shù)機(jī)動(dòng)[M].北京:中國人民大學(xué)出版社,2014.
[4]周旭.數(shù)學(xué)建模與仿真[M].北京:國防工業(yè)出版社,2003.
[5]古侃.雷達(dá)標(biāo)繪自動(dòng)化模塊算法研究[A].徐惠心.船舶航泊實(shí)踐研究論文集[C]//廣州:中國航海學(xué)會(huì),2010:123-127.
[6]黃文雅,童雪娟.海警艦艇接近機(jī)動(dòng)自動(dòng)繪算的軟件設(shè)計(jì)與實(shí)現(xiàn)[J].公安海警學(xué)院學(xué)報(bào),2015,13(3):76-78.
[7]楊裕浩,張?jiān)矗锶A,等.基于模型的艦艇機(jī)動(dòng)系統(tǒng)設(shè)計(jì)[J].艦船科學(xué)技術(shù),2013,35(8):129-131.
[8]陳亮,楊勤.基于ECDIS的艦船機(jī)動(dòng)智能決策支持系統(tǒng)的研究[J].廣州航海高等專科學(xué)校學(xué)報(bào),2011,19(2):5-7.
[9]李啟華,簡(jiǎn)遠(yuǎn).艦船規(guī)避低速目標(biāo)機(jī)動(dòng)計(jì)算模型研究[J].廣州航海高等專科學(xué)校學(xué)報(bào),2011,19(2):1-4.
[10]王子明,徐海峰,王宗杰,等.基本戰(zhàn)術(shù)動(dòng)作的艦艇作戰(zhàn)指揮過程建模[J].艦船科學(xué)技術(shù),2012,34(6):91-94.
