基于關聯準則的主瓣航跡欺騙干擾方法
2018-02-07 06:50:14陶建鋒李興成
系統工程與電子技術 2018年2期
關鍵詞:關聯
袁 天, 陶建鋒, 李興成
(空軍工程大學防空反導學院, 陜西 西安 710051)
0 引 言
現代軍事戰爭中,電子對抗領域已成為敵我雙方激烈斗爭的陣地,雷達作為核心裝備成為攻擊和破壞的首要目標。隨著軍事技術的發展進步,雷達新體制新技術應運而生,作戰性能不斷提升,單純的距離、角度、速度假目標欺騙干擾技術已不能滿足現代戰爭的作戰需求。航跡欺騙干擾則是結合了上述各項欺騙技術的綜合干擾措施[1-7],單機航跡欺騙乃至多機協同干擾[8-20]是當今電子對抗領域亟待研究發展的熱點技術。
現有航跡欺騙干擾技術主要利用干擾機對敵方雷達發射具有真實目標運動學特征的干擾信號,來模擬真實目標回波,在雷達終端生成虛假航跡[21]。考慮重點在于如何調制干擾參數,認為只要模擬的假目標符合真實目標特征,就能被雷達所識別,對航跡關聯準的考慮相對較少。
本文在此基礎上著重考慮以雷達關聯準則為參考進行干擾參數的設計及遞推,使得預設虛假航跡滿足關聯準則。由于模擬的假目標點跡符合航跡關聯準則,其必定能被雷達檢測識別[22],從而達到更為有效的航跡欺騙效果。
1 主瓣航跡欺騙原理
對雷達實施航跡欺騙的目的在于使敵方雷達在我方想定的位置發現虛假的運動目標,而虛假目標則是由我方干擾機向敵方雷達發射具有一定規律的欺騙干擾信號得到的。雷達接收到調制干擾信號后進行處理就會在想定的方位和距離上發現虛假的運動目標,由于干擾信號的逼真性,雷達將無法分辨其是否為虛假目標,從而達到以假替真的目的[23]。其重點在于如何合理地設置虛假目標的空間位置和運動參數,從而使得敵方雷達能夠在連續掃描周期內檢測到相應的假目標并且各假目標點跡之間符合航跡關聯準則,最終在雷達顯示器上形成連續逼真的虛假目標航跡,達到欺騙干擾目的。
虛假航跡是由多個虛假點跡序貫構成的,因此關鍵在于主瓣假目標點跡的確定和實現,圖1給出了主瓣航跡欺騙的虛假點跡和虛假航跡的形成原理。
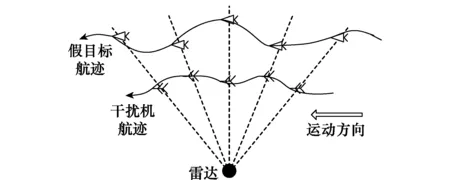
圖1 主瓣航跡欺騙原理示意圖Fig.1 Schematic diagram of main lobe track deception principle
其主要通過空中平臺攜帶欺騙干擾機,將截獲的雷達主瓣信號進行適當的延時轉發形成假目標,實現航跡欺騙干擾。干擾機偵察到雷達主瓣信號后,延時一定時間后轉發就形成了單個假目標點跡,每一時刻假目標都位于干擾機與雷達連線的延長線上,當干擾機以一定方式運動時,雷達探測到的假目標也發生運動,最終所有點跡所形成的就是具有航跡特征的假目標航線。
由此可見在航跡欺騙過程中假目標點跡的形成是基礎,關鍵則在于各假目標點跡之間是否符合雷達航跡關聯準則,這關系其是否能被敵方雷達判定為虛假航跡,因此航跡關聯準則是欺騙過程的重點所在。
2 航跡關聯準則分析
單雷達目標跟蹤基本原理框圖如圖2所示。
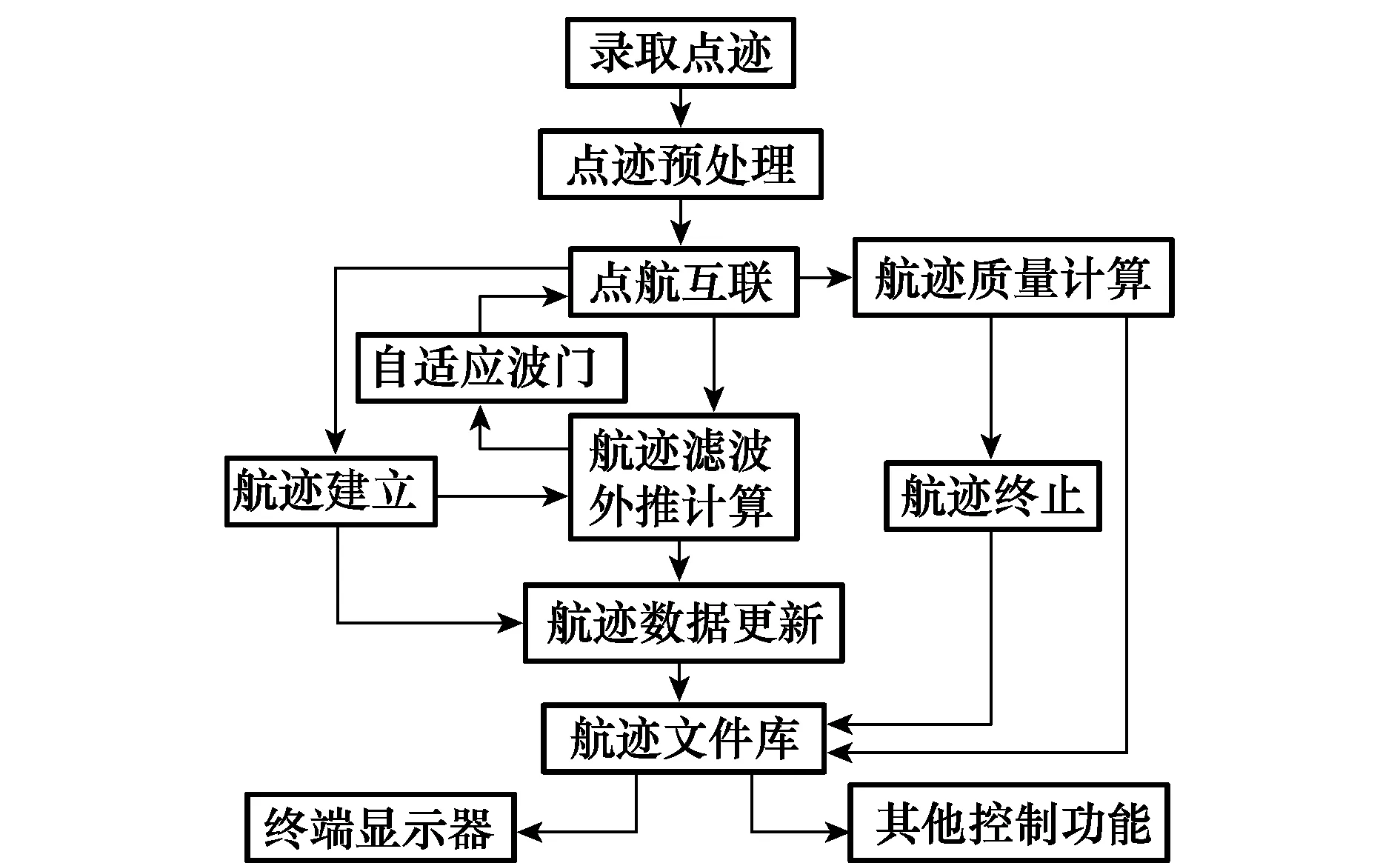
圖2 目標跟蹤原理框圖Fig.2 Principle block diagram of target tracking
當雷達探測到目標后,新的點跡錄取器提取目標的位置信息,以相應的航跡起始方法進行最初的點跡相關形成初始航跡。而后對新錄取的點跡進行預處理并對其與已存在的航跡進行數據互聯,互聯上的點跡用來更新相應的航跡信息,沒有互聯上的點跡進行新航跡的起始,如果目標航跡連續多次沒有與點跡與其互聯,則航跡終止。因此可以看出,跟蹤過程的關鍵技術在于航跡起始與終結、點航數據互聯、跟蹤濾波,而貫穿其中的就是航跡關聯技術。
2.1 點點關聯
航跡起始過程就是點跡與點跡相關聯的過程,根據多目標跟蹤航跡起始相關理論[24],點點關聯的關鍵在于起始波門的形狀、尺寸和航跡起始算法,在此為保證一般適用性,選取橢球波門和直觀航跡起始法。
2.1.1 橢球波門
Z(k+1)=H(k+1)X(k+1)+W(k+1)
(1)

(2)
S(k+1)=H(k+1)P(k+1|k)H′(k+1)+R(k+1)
(3)
若傳感器測得的目標直角坐標系下的轉換量測Zc(k+1)滿足:

(4)
則稱轉換量測值Zc(k+1)為候選回波,式(4)稱為橢球波門規則。
針對不同γ和量測維數nz,真實轉換量測落入波門內的概率PG是不同的,將其定義為
(5)
本文中量測維數取三維,真實轉換量測落入波門內的概率PG取0.99,通過查詢χ2分布表可得門限參數γ為11.345。
其對應的波門體積為
V=4π/3γ3/2|S(k+1)|1/2
(6)
2.1.2 直觀起始法
假定ri(i=1,2,…,N)為N次連續掃描獲得的位置觀測值,如果這N次掃描中有M個觀測值滿足以下條件,就認定應當起始一條航跡。
(1) 速度約束:測得的速度值大于某最小值Vmin且小于某最大值Vmax,即
(7)
(2) 加速度約束:測得的加速度值小于某最大值amax,即
(8)
(3) 角度約束:測得的位置矢量之間的夾角小于某一設定值φ0,即
(9)
式中,0<φ0≤π;φ0=π則表示角度不受限制。
2.2 點航關聯
上一節對航跡起始問題進行了分析和討論,解決了點跡與點跡的正確互聯問題,而航跡起始后還需要解決點跡與航跡的互聯問題。在此主要針對單目標跟蹤和數據處理,因此主要介紹針對單目標跟蹤問題的最近鄰域(nearest neighborhood standard filter, NNSF)算法和概率數據互聯算法(probabilistic data algorithm, PDA)并進行對比分析。
2.2.1 NNSF算法
NNSF算法利用先驗統計特性估計相關性能,通過跟蹤波門初步篩選所得到的回波成為候選回波。其判別條件就是看目標量測值是否滿足下式:
(10)
若落入相關波門的量測值只有一個,則該量測值可以被直接用于航跡更新;若有一個以上的回波落入相關波門,此時取統計距離最小的候選回波作為目標回波,也就是在最近鄰域標準濾波器中,使新息加權范數
(11)
達到極小的量測,被用于在濾波器中對目標狀態進行更新。本方法的優點在于計算簡單,缺點在于多目標環境下離目標預測位置最近的候選回波不一定就是目標的真實回波,有可能出現誤跟和丟失的現象,因而其只適用于稀疏回波環境中跟蹤非機動目標。
2.2.2 PDA算法
概率數據互聯算法考慮了落入波門內的所有候選回波,并根據不同的相關情況計算出各回波來自于目標的概率,然后利用這些概率對相關波門內不同回波進行加權,各候選回波的加權和作為等效回波,相對于NNSF算法的優點在于誤跟和丟失目標的概率較小,而且計算量較小。給出PDA的單次循環流程圖如圖3所示。
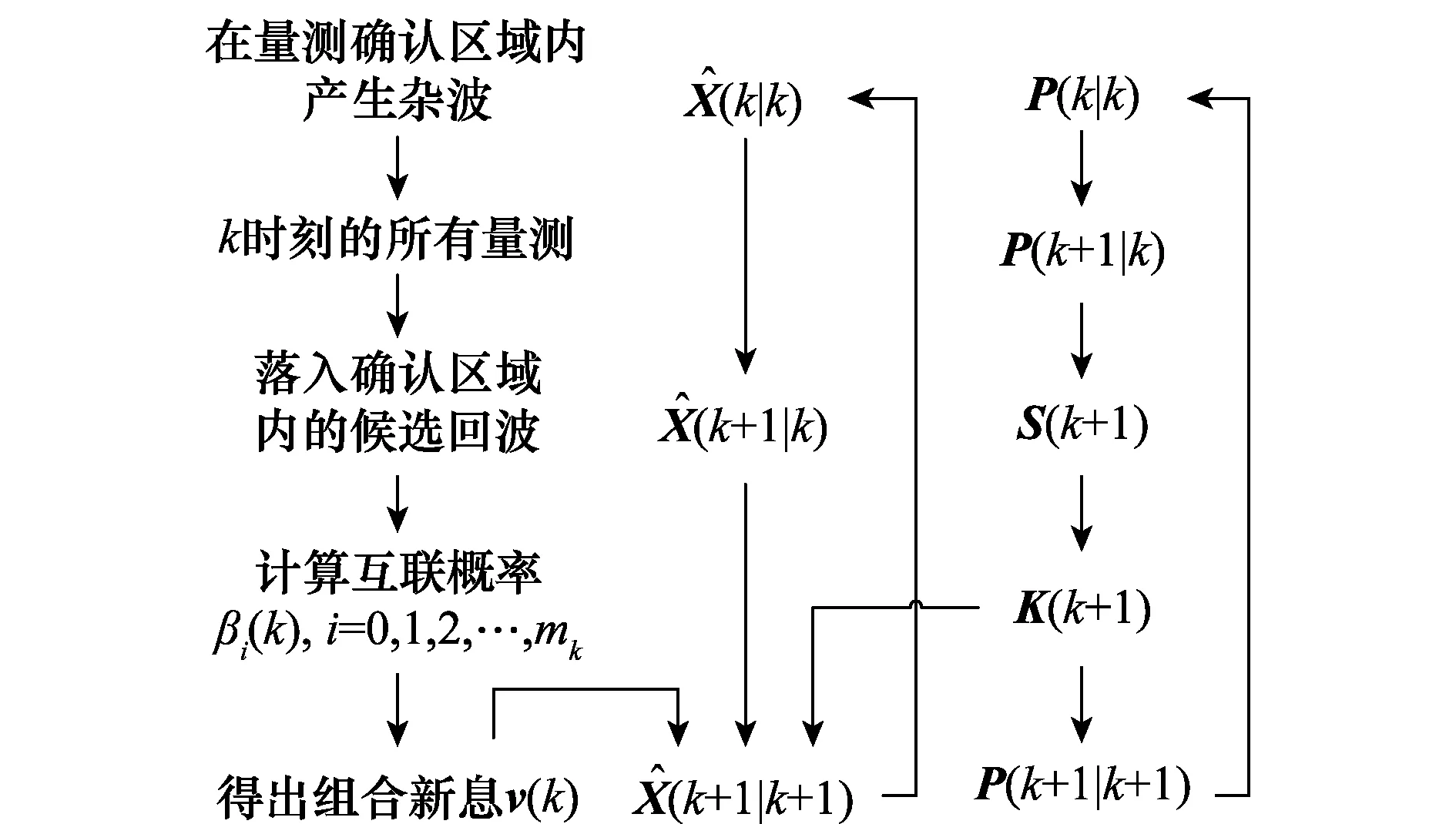
圖3 概率數據互聯算法循環流程圖Fig.3 Cyclic flow chart of probabilistic data association algorithm
綜上所述,本文所提出的基于關聯準則的主瓣航跡欺騙干擾方法中的關聯準則應當選取PDA算法,其主要思路是通過模擬實際情況中存在多候選回波的情況,在預設虛假目標點跡的時候不直接設置單個虛假目標點跡,而以實際情況中多候選回波進行計算得出的加權和作為預設的虛假點跡,且新點跡的設置以上述關聯準則進行推導,最終得到整條航跡的所有組成點跡,這些點跡均滿足關聯準則。
干擾機根據預設的所有點跡對接收到的雷達信號進行調制并轉發至雷達,由于預設點跡滿足關聯準則,因此將被雷達所識別并與現有航跡關聯上,最終成功實現航跡欺騙。同時除了單目標航跡欺騙以外,還可以以多機實現多個虛假航跡的欺騙效果,從而更加有效地實現占用敵方雷達資源、掩護我方作戰的目的。
3 干擾信號調制生成
通過前文分析可知,雷達在對所獲取的點跡進行預處理后進行航跡起始和點航關聯最終可以得到目標的航跡,其航跡參數主要包括虛假目標點跡的位置、速度和加速度。因此要達到被敵方雷達識別并確認為航跡的目的,我方干擾機就必須在適當的時機施放帶有相應干擾參數調制的干擾信號,因此干擾參數的調制和干擾信號的施放是主瓣航跡欺騙干擾能否成功的關鍵。
3.1 航跡參數獲取
要得到干擾機的干擾參數首先就要獲得所需模擬的虛假目標的航跡參數,現有的方法基本不考慮航跡關聯的影響,認為設計的虛假航跡參數只要符合實際目標的運動規律就一定能被檢測識別,在此則利用雷達實際數據處理過程中的互聯濾波結果直接作為設計的虛假航跡,進而獲得其具體的航跡干擾參數。
3.2 干擾參數分析
以常用的線性調頻(linear frequency modulation, LFM)信號為例,定義A為振幅,f0為載波頻率,τ為脈沖寬度,μ為調頻斜率,μ=B/τ,B為頻帶寬度,rect(t)表示矩形脈沖,則雷達發射信號為
(12)
則調制之后的干擾信號可表示為
J(t)=krect(t-Δt)*
(13)
式中,k、Δt、fd分別表示對接收到的雷達信號的幅度、時延和多普勒頻率調制。
3.2.1 幅度調制分析
根據偵察方程,定義Pt為雷達發射功率,Gt和Gr為雷達發射和接收天線增益,λ為發射信號波長,Gj為干擾機接收天線增益,Rj為干擾機與雷達距離,Rf為假目標與雷達距離,σ為雷達散射截面(radar cross section, RCS ),則干擾機截獲的雷達信號功率為
(14)
將干擾信號轉發給雷達,則雷達接收到的干擾信號功率為
(15)
式中,K=k2是對干擾信號的幅度調制。
所要模擬的假目標產生的回波功率應為
(16)
因此式(15)與式(16)應當相等,則有
(17)
對其進行化簡可得幅度調制參數為
(18)
3.2.2 時延調制分析
定義雷達的脈沖重復周期為TP,且在此假設假目標位于干擾機與雷達連線的延長線上,則時延Δt可以表示為
Δt=2(Rf-Rj)/c,Rf>Rj
(19)
給出雷達、干擾機和假目標的空間關系如圖4所示。
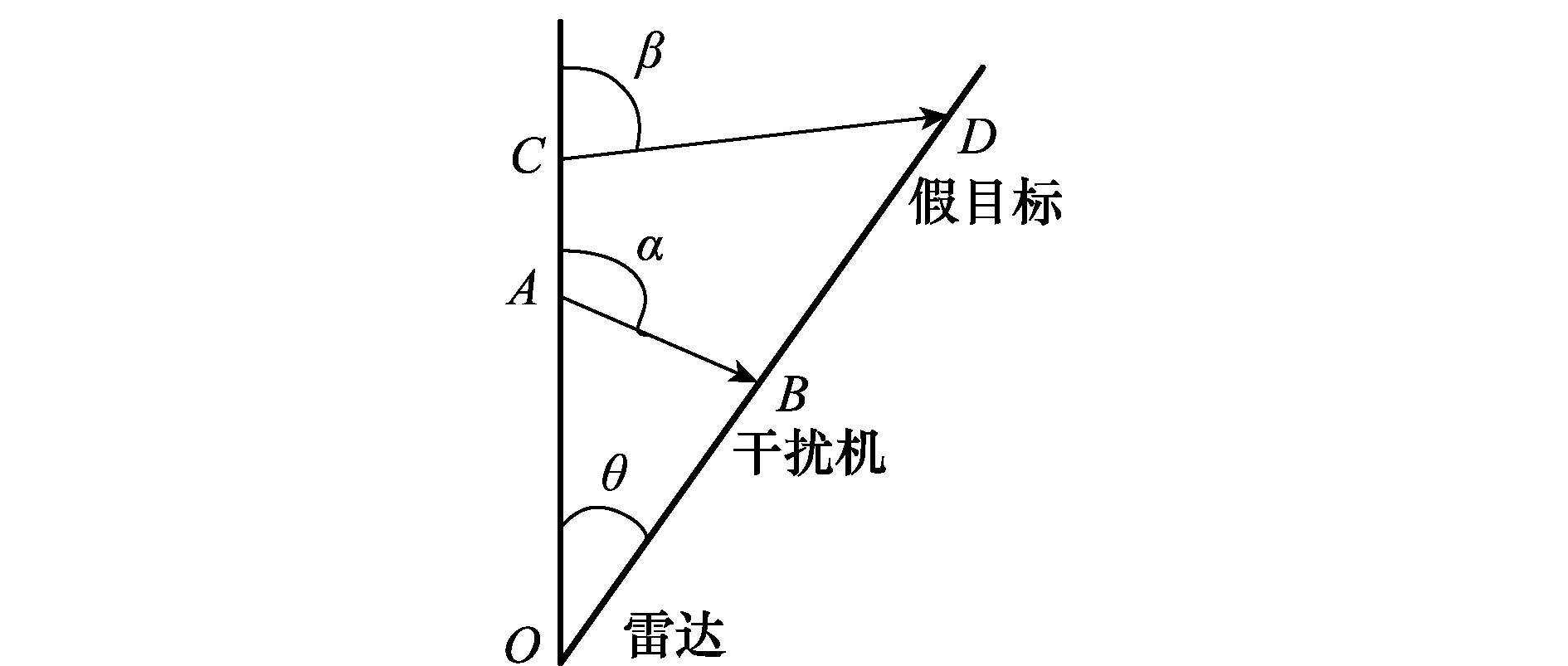
圖4 空間關系圖Fig.4 Spatial relation graph
如圖4所示,A和C表示當前干擾機和假目標的位置,B和D表示下一次干擾機和假目標的位置,在此設定各參數如下:
OA=Rj0,OC=Rf0,OB=Rj1,OD=Rf1
CD=d, ∠AOB=∠COD=θ
由前文分析可知,在整個過程中首先得到的是假目標點跡的參數和當前時刻的干擾機位置,即Rf0、Rf1和d是已知的,需要求解的就是下一次干擾時干擾機位置即Rj1。
在ΔCOD中,已知OC、OD和CD,因此通過余弦定理可以求得θ為
(20)
在ΔAOB中,已知OA、θ,在此假設α已知,則有∠OAB=π-α,通過正弦定理可以求得OB即Rj1為
(21)
(22)
將其代入式(19)可得
(23)
從上述過程可以發現,在獲得虛假目標航跡的基礎上,可以通過遞推得到干擾機的運動特征參數,只要在干擾過程中使得干擾機按此方式運動并釋放干擾就能形成相應的虛假航跡。
3.2.3 多普勒調制分析
在干擾過程中兩次干擾之間的時間間隔設為Δt0,實際情況中假目標可能會做勻變速運動,在此為方便計算,假定其在干擾點處的速度為其在這段時間內勻速運動的速度,因此可以求出假目標和干擾機的運動速度為
(24)
(25)
因此干擾信號的多普勒頻率為
(26)
而在進行多普勒調制時,應當考慮到自身多普勒效應的影響,在過程中應將其抵消,因此最終的多普勒調制參數應為
(27)

αmin≤α≤αmax
(28)
在此對其進行隨機選取,即
α=αmin+rand×(αmax-αmin)
(29)
4 干擾實施過程設計
根據前文的分析推導,設計主瓣航跡欺騙干擾過程如圖5所示,具體實施步驟如下:
步驟1干擾偵察,獲得敵方雷達的位置、發射信號形式、波束信號強度和駐留時間等先驗信息;
步驟2虛假航跡設定,以第2節提出的相關理論針對敵方雷達設計符合其一般航跡關聯準則的虛假航跡,得出虛假航跡、點跡的各項參數;
步驟3參數推導裝訂,在對干擾機自身狀態進行初始化測量的基礎上,依據第3節提出的干擾信號調制方法推導干擾機運動參數并進行裝訂;
步驟4干擾具體實施,首先判定是否為首次干擾,若是,則使用步驟3的初始參數實施首次干擾,而后進行遞推計算下次干擾參數;若不是,則使用遞推參數釋放干擾,直至干擾結束;
步驟5干擾結束,一是由我方下達干擾結束指令,二是干擾機連續多個雷達工作周期為截獲雷達波束。
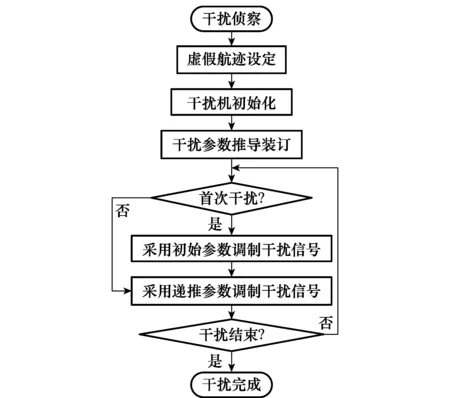
圖5 干擾過程流程圖Fig.5 Flow chart of interference process
5 仿真實驗驗證
在前文分析的基礎上,在此對整體干擾過程進行仿真實驗驗證,主要包括符合典型航跡關聯準則的虛假航跡的仿真驗證、裝訂相應干擾參數的干擾機運動軌跡的仿真驗證以及多干擾機協同干擾多部雷達的效果仿真。
5.1 假目標航跡仿真
現有的航跡欺騙干擾所設定的虛假航跡主要對其速度范圍和航向角進行了限定,在此設定虛假航跡為一勻變速運動目標,以虛假航跡起始位置為原點建立三維直角坐標系,取雷達位置為(-50 000,50 000,0),虛假航跡起始點相對于雷達的方位角為315°,其運動情況如表1所示。
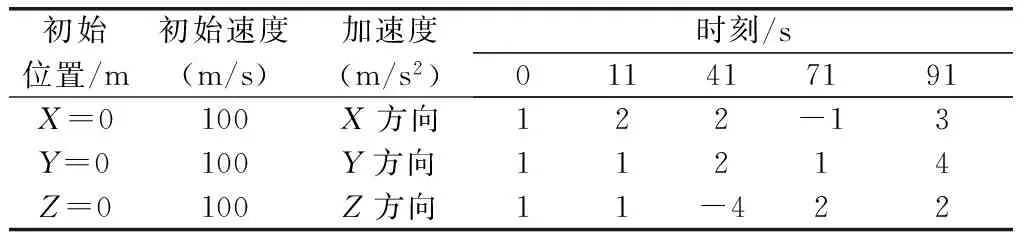
表1 虛假航跡運動特征
在此分別采用PDA和NNSF兩種互聯算法對其進行航跡濾波,濾波軌跡如圖6所示,其各方向維及整體位置誤差計算結果如圖7和圖8所示。圖6中坐標分別表示X、Y、Z方向,單位均為m。
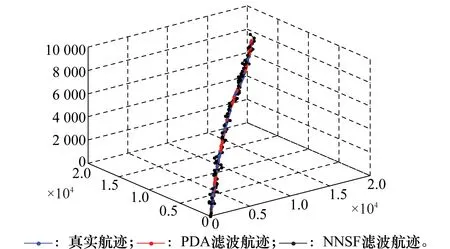
圖6 航跡濾波軌跡圖Fig.6 Track chart of track filtering
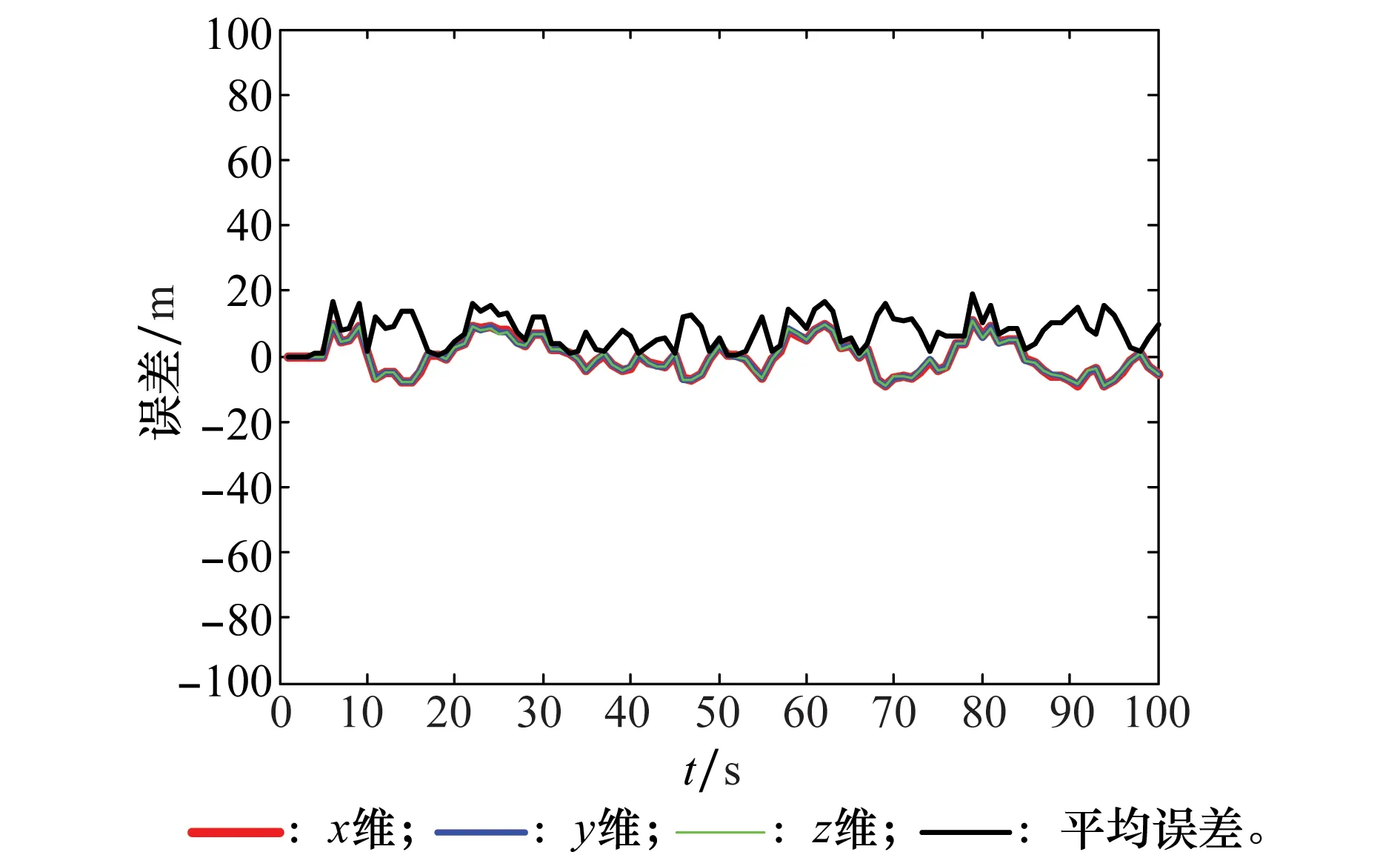
圖7 PDA位置誤差Fig.7 Position error of PDA
觀察圖6可以看出,對于同樣的真實目標軌跡采用PDA算法比NNSF算法效果要好,對比圖7和圖8的位置誤差也可以看出PDA更優。因此只要預設的虛假航跡滿足一般典型的航跡關聯準則就能被敵方雷達識別,從而達到欺騙目的。

圖8 NNSF位置誤差Fig.8 Position error of NNSF
5.2 干擾機航跡仿真
在給出虛假目標航跡的基礎上,對干擾機狀態進行初始化,在此設定干擾機的初始位置距離雷達60 km,其初始方位角同樣為315°。根據預設的虛假航跡的運動參數對干擾機參數進行推導,在此給出其部分初始點的參數如表2所示。
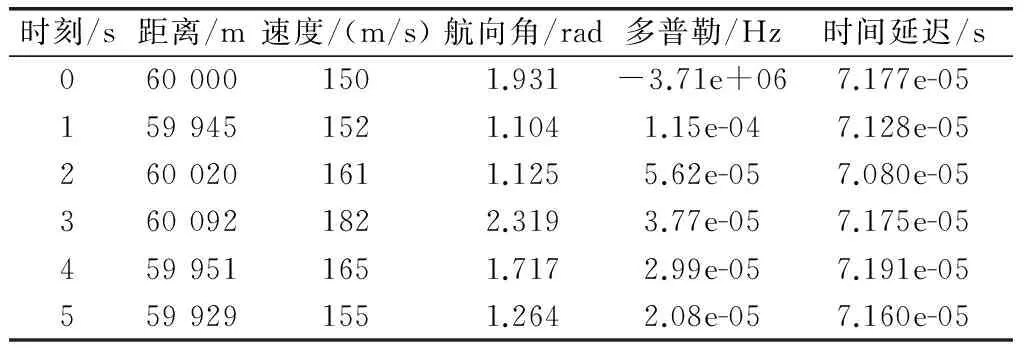
表2 干擾機調制參數
根據表2結果可以看出,通過參數遞推可以得出干擾機各個時刻的運動參數,從而可以得出干擾機在整個干擾過程中的點跡,進而得出干擾機運動軌跡,下面給出干擾機發射信號通過雷達數據處理后在平面位置顯示器(plan position indicator, PPI)上顯示的假目標及干擾機航跡如圖9所示。
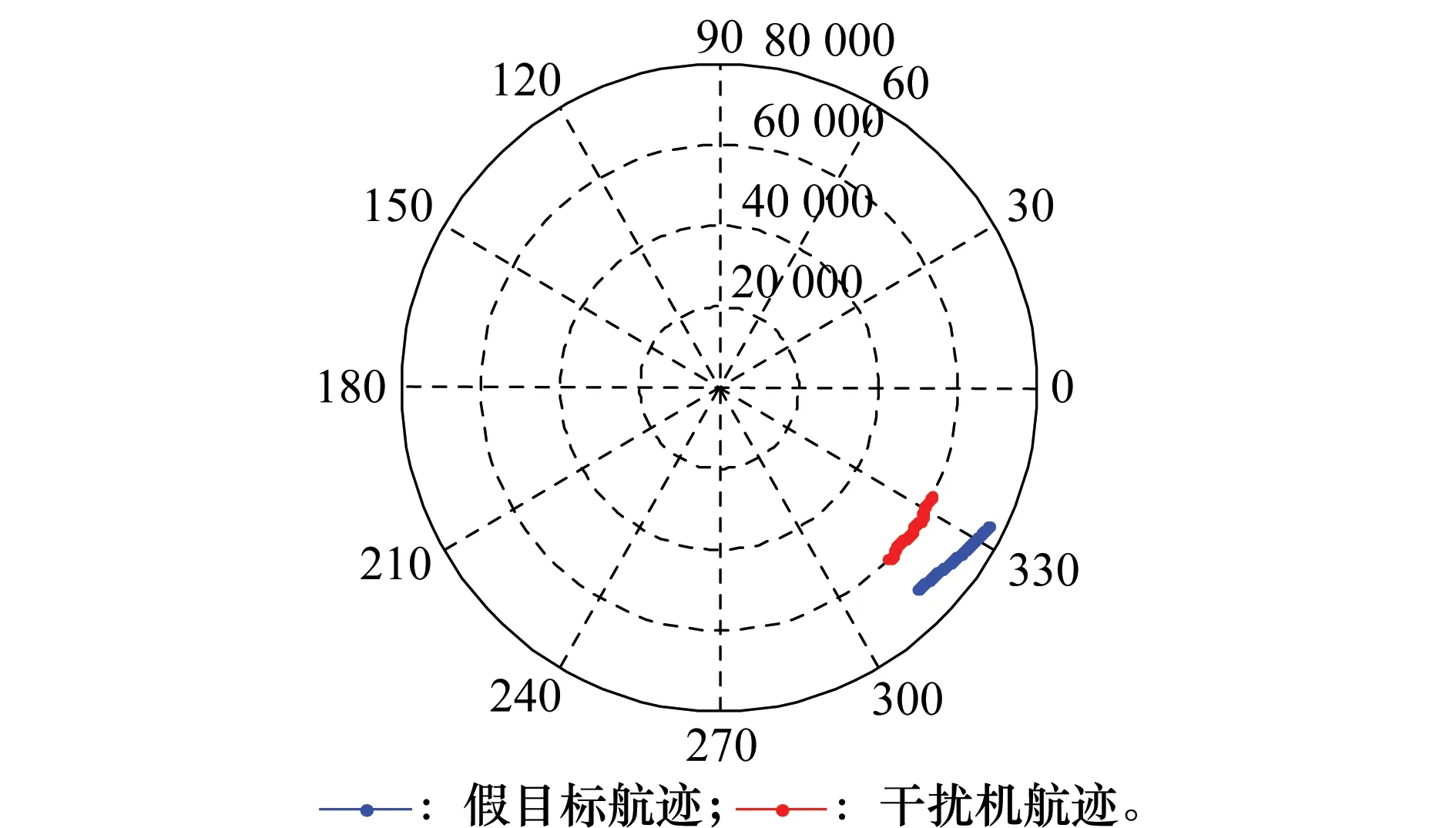
圖9 假目標及干擾機航跡Fig.9 False target and jammer track
由圖9可以看出,根據上述方法產生的預設假目標航跡推導而出的干擾機航跡及運動參數是有效的,干擾機按照相應的運動參數進行機動,同時發射經過調制的干擾信號,被雷達接收之后將被雷達關聯波門關聯,最終能在顯示器上形成連續假目標航跡。如攜帶干擾機的載體為隱身性能較好的小型機甚至無人機,敵方雷達將不能發現干擾機,因此也將獲得更好的干擾效果。
5.3 多機協同干擾仿真
前文對單個干擾機欺騙單部雷達的過程進行了分析,給出了欺騙干擾的實施流程,通過仿真實驗進行了驗證,結果證明其能夠達到較好的航跡欺騙干擾效果。而在實際對抗環境中,敵方雷達通常是以組網形式進行工作的,針對組網雷達具有的信息共享性及覆蓋范圍擴大的特點,現有的通過單部干擾機欺騙多部雷達的工作方式對干擾機性能要求較高。
另一種欺騙干擾方式則是多機協同進行欺騙干擾,在單個干擾機欺騙單部雷達的基礎上,將所有干擾機模擬的假目標航跡設定為同一條軌跡[12],在本文中即是要求欺騙流程中第II步中設定的虛假航跡相同,而后各干擾機針對各自對應的雷達按照單個干擾機欺騙單部雷達的流程進行工作,最終組網雷達識別出的將是同一虛假航跡,達到欺騙組網雷達的目的。
在此對最為典型的兩部干擾機欺騙兩部雷達的情形進行仿真實驗,虛假航跡運動參數設定與前文相同,雷達1距離假目標航跡起始點80 km,其方位位于起始點0°方向,雷達2距離假目標航跡起始點80 km,其方位位于起始點180°方向;干擾機1距離假目標航跡起始點50 km,方位角與雷達1相同,干擾機2距離假目標航跡起始點50 km,方位角與雷達2相同。按照圖5流程進行仿真,結果如圖10所示。
觀察圖10可以看出,兩部干擾機按照干擾流程分別對相應雷達進行航跡欺騙,在達到各自欺騙效果的基礎上,由于設定的虛假航跡相同,因此兩部雷達經過處理得出的假目標航跡的空間特性和運動特性應當是相同的,當其進行信息共享之后將判定識別為同一虛假航跡,從而達到對組網雷達的欺騙干擾效果。
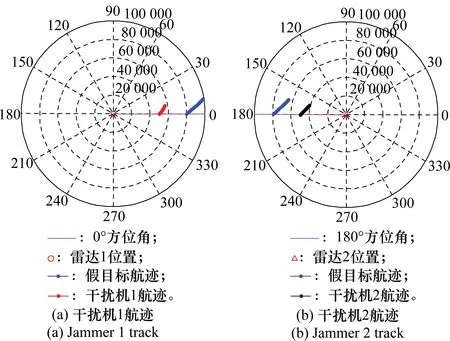
圖10 兩機協同航跡欺騙結果Fig.10 Two aircraft cooperative track deception results
在實際雷達探測過程中得出的濾波航跡會產生一定誤差,在此對兩部雷達所得濾波航跡進行誤差對比。設定兩部雷達所得量測為預設航跡周圍較小范圍內隨機分布,且隨機范圍一致,其誤差對比曲線如圖11所示。
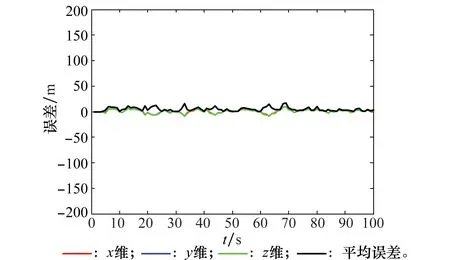
圖11 濾波航跡位置對比誤差Fig.11 Filtering track position contrast error
觀察圖11可知,兩部雷達濾波結果存在一定偏差,但誤差保持在較低水平,說明兩機協同實施航跡欺騙干擾完全可行且效果良好,也表明多機協同干擾乃至“蜂群戰術”是完全可行且意義重大的研究方向。
6 結 論
主瓣航跡欺騙干擾是近年來發展起來的一種有效的電子對抗手段,合理的虛假航跡規劃及干擾實施流程將使干擾效果更加優異。本文針對前人航跡規劃僅僅考慮運動參數限制和單部干擾機為主的情況,提出以航跡關聯準則為參考設定虛假航跡,在此基礎上推導干擾機運動參數和干擾信號調制參數,仿真結果表明經過調制的干擾信號最終能被敵方雷達識別為近似預設航跡;同時在單部干擾機實施干擾的基礎上,探究了多部干擾機同時干擾組網雷達的工作模式及其可行性,仿真結果表明所提干擾方法在兩部干擾機對抗兩部雷達情形下可以達到較好的干擾效果,為更大范圍更多數量的組網雷達電子對抗打下了一定基礎。
[1] PURVIS K B, CHANDLER P R,PACHTER M, et al. Feasible flight paths for cooperative generation of a phantom radar track[J]. Journal of Guidance, Control, and Dynamics,2008,29(3): 653-661.
[2] PACHTER M, CHANDLER P R, LARSON R A, et al. Concepts for generaring coherent radar phantom tracks using cooperating vehicles[C]∥Proc.of the AIAA Guidance, Navigation, and Control Conferenceand Exhibit, 2004:1-14.
[3] KEITH B P, PHILLIP R C. A review of recent algorithms and a new and improved cooperative control design for generating a phantom track[C]∥Proc.of the American Control Conference, 2007:3252-3258.
[4] XU Y J, BASSET G. Bio-inspired virtual motion camouflage based subspace optimal trajectory design[C]∥Proc.of the American Control Conference, 2009:5656-5661.
[5] XU Y J, BASSET G. Virtual motion camouflage based phantom track generation through cooperative electronic combat air vehicles[J].Automatica, 2010(46):1454-1461.
[6] IL H L, HYOCHOONG B. Phantom track generation using predictive control concept[C]∥Proc.of the International Conference on Control, Automation and Systems, 2011:291-293.
[7] XU Y J, GARETH B. Optimal coherent phantom track design using virtual motion camouflage[C]∥Proc.of the American Control Conference, 2010: 5400-5405.
[8] KEITH B P, KARL J A, MUSTAFA K. Estimating radar positions using cooperative unmanned air vehicle teams[C]∥Proc.of the American Control Conference, 2005:3512-517.
[9] WAUN S D, OZGUNER U. Deception of radar system using cooperatively controlled unmanmed air vehicles[C]∥Proc.of the 43rd IEEE Conference on Decision and Control, 2004:3370-3375.
[10] STAVROULAKIS P, FARSARIS N, XENOS T D. Anti-jamming transmitter independent radar networks[C]∥Proc.of the International Conference on Signal Processing, Communications and Networking, 2008:269-273.
[11] MEIR P. Concepts for generating coherent radar phantom tracks using cooperating vehicles[C]∥Proc.of the AIAA Guidance, Navigation, and Control Conference and Exhibit, 2004:1113-1127.
[12] KEITH B P. Feasible flight paths for cooperative generation of a phantom radar track[C]∥Proc.of the AIAA Guidance, Navigation, and Control Conference and Exhibit,2004:1167-1186.
[13] IL H L. Cooperative control of multiple electronic combat air vehicles for electronic attack[C]∥Proc.of the SICE Annual Conference, 2008:2127-2130.
[14] IL H L. Optimal phantom track generation for multiple electronic combat air vehicles[C]∥Proc.of the International Conference on Control, Automation and Systems, 2008:29-33.
[15] Maithripala D H A, Jayasuriya S, Mears M J. Phantom track generation through cooperative control of multiple ECAVs based on feasibility analysis[J].Journal of Dynamic Systems, Measurement and Control, 2007(129):709-715.
[16] XU Y J, GARETH B. Virtual motion camouflage based phantom track generation through cooperative electronic combat air vehicles[J]. Automatica,2010(46):1454-1461.
[17] MAITHRIPALA D H A, JAYASURIYA S. Phantom track generation in 3D through cooperative control of Multiple ECAVs Based on geometry[C]∥Proc.of the 1st International Conference on Industrial and Information Systems, 2006.
[18] SCOTT W. A Cooperative range delay deception-based approach to multiple radar phantom tracks[A].AFRL-VA-WP-TM, 2003-3085.
[19] PURVIS K B. Cooperative deception of radar networks by using electronic combat air vehicles (ECAV) teams to create coherent phantom tracks[A]. AFRL-VA-WP-TR-2003-3079.
[20] PACHTER M, CHANDLER P R, LARSON R A, et al. Concepts for generating coherent radar phantom tracks using cooperating vehicles[C]∥Proc.of the AIAA Guidance, Navigation, and Control Conference and Exhibit, 2004.
[21] 孫龍祥,趙波,邱衛軍,等.一種具有航跡特征的雷達假目標產生技術[J].雷達科學與技術,2005,3(4):198-202.
SUN L X, ZHAO B, QIU W J, et al. A technique for generating the radar’s false target with signature of flight path[J]. Radar Science and Technology, 2005,3(4): 198-202.
[22] 劉顥,陳世友,汪學東,等.一種自適應航跡關聯算法[J].電子學報,2013,41(12):2416-2421.
LIU H, CHEN S Y, WANG X D, et al. An adaptive track correlation algorithm[J].Acta Electronica Sinica,2013,41(12): 2416-2421.
[23] 李欣,王春陽.航跡欺騙干擾及其對抗技術的研究現狀與發展[J].飛航導彈,2013(8):64-67.
LI X, WANG C Y, Research statue and development of track deception jamming and countermeasure method[J]. Winged Missile, 2013(8): 64-67.
[24] 何友,修建娟,關欣,等.雷達數據處理及應用[M].3版.北京:電子工業出版社,2013.
HE Y, XIU J J, GUAN X. Radar data processing with applications[M]. 3rd ed. Beijing: Publishing House of Electronic Industry, 2013.
猜你喜歡
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
原道(2020年2期)2020-12-21 05:47:06
當代陜西(2019年15期)2019-09-02 01:52:00
中國非營利評論(2018年2期)2018-06-18 10:48:50
學苑創造·A版(2018年11期)2018-02-01 06:29:20
自動化學報(2017年1期)2017-03-11 17:31:17
讀者(2017年5期)2017-02-15 18:04:18
西藏科技(2016年5期)2016-09-26 12:16:39
振動工程學報(2015年1期)2015-03-01 01:15:42