數控機床主軸PLC控制仿真與實現
2018-02-18 01:29:16范華
中學課程輔導·教師教育(上、下) 2018年23期
關鍵詞:仿真
范華
摘?要:PLC(可編程邏輯控制)控制是數控機床控制電路中非常重要的組成部分之一,在設計或教學過程中由于受實驗條件、教學環境的限制很難去展開。采用Multisim12軟件的Ladder Diagrams模塊,以主軸正反轉控制為典型案例建立Multisim12電氣仿真模型,設計梯形圖通過設置電氣參數進行系統仿真,利用自有測試儀器觀察仿真結果,最后在真實機床XK5025上實現。該方法不需要大量的儀器設備,降低教學成本,同時可以現場模擬展示,人人動手,具有一定的普適性。
關鍵詞:Multisim12;PLC;數控機床;仿真
中圖分類號:G712?文獻標識碼:A ????文章編號:1992-7711(2018)23-066-3
數控機床是典型的機電一體化產品,數控裝置將加工程序的代碼信息經運算處理后發出各種控制信號完成各軸控制運動[1]。其中PLC的作用是接收零件加工程序的開關功能信息(輔助功能M、主軸轉速功能S、刀具功能T)、機床操作面板上的開關量信號和機床側的開關量信號進行邏輯處理,完成輸出控制功能,實現各功能及操作方式的聯鎖。
數控機床是一個相對復雜的機電控制系統,成本較高,不可能大批量購置,在實驗實訓過程中很難實現人手一臺,而且在實驗實訓過程中學生不太熟悉,操作的盲目性會導致機床的硬件損壞、數據丟失等,鑒于以上原因,導致許多高校在教授PLC在數控機床上的應用只能局限于書本教學或者許多學生扎堆在一、二臺機床上,教學效果不理想。目前也有許多專用的PLC編輯調試軟件,比如Fanuc數控系統FAPT Ladder III軟件可以編制梯形圖,只具有在線監視和診斷功能[2],但不能實現離線脫機仿真,仍然離不開機床硬件的支持。NI公司的Multisim12軟件具有繼電器和梯形圖功能仿真模塊,很好的解決書本知識與實驗實訓相脫節的難點問題,學生可以很方便地把學到的理論知識用計算機語言真實的再現出來,并且可以用虛擬儀器測量仿真實驗的結果驗證設計的可行性,極大地提高了學習熱情和積極性,真正地從理論知識的灌輸到理實一體的轉變。
一、軟件介紹
Multisim12是美國國家儀器(National Instruments,簡稱NI)最近推出的用于電路設計和電子教學的交互式仿真軟件,不僅提供電子電路的虛擬仿真,而且可以實現LabView虛擬儀器、單片機仿真、VHDL和VerilogHDL建模、Ultiboard設計電路板等功能[3]。Multisim12主要的功能如下[4]:
(1)提供交互式仿真環境,用戶通過仿真結果理解電路的概念無須考慮應用環境。
(2)具有22種與真實儀器相同功能的虛擬測量儀器和20個功能強大數據分析工具,便于實驗數據的測量與分析處理。
(3)通過VHDL語言、Ladder語言可以捕捉并仿真PLD(可編程邏輯設備)、PLC(可編程邏輯控制器)數字電路,很容易實現理論知識到真實實驗的過度。
(4)包含2萬多部件庫,有些部件具有交互式(如開關和電位計)、動畫效果(如LED和7段數碼管)、虛擬參數設置和3D效果的部件等。
目前Multisim12軟件絕大多數應用在模擬電路和數字電路中,但在繼電器電路和PLC控制電路中的應用相關研究較少。本文從Fanuc 0i系統的XK5025數控銑床的主軸正反轉控制為例,研究和探討Multisim12軟件在數控機床PLC控制中的應用。
二、機床主軸正反轉PLC控制仿真
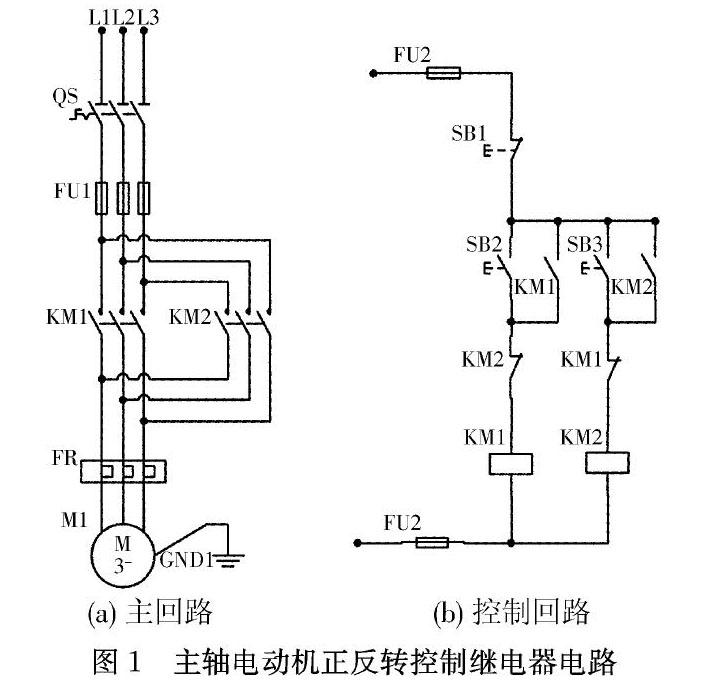
1.正反轉繼電器電路特點
主軸電機的正反轉是機床中最常見的控制功能,經典的繼電器電路[5],按下控制回路中SB2按鈕,交流接觸器KM1線圈接通,正轉回路中KM1常開輔助觸點吸合實現電路自鎖,反轉回路中KM1常閉輔助觸點斷開實現互鎖,同時主回路中KM1交流接觸器主觸點閉合,主軸電動機正轉;同理按下SB3按鈕,KM2常開輔助觸點吸合自鎖,KM2常閉輔助觸點斷開互鎖,主回路中KM2主觸點閉合,主軸電動機反轉。按下SB1停止按鈕斷開控制回路,主軸電機停轉。
由于繼電器電路線路復雜,觸點多,故障率高,調試、修改不方便等原因,目前在數控機床上逐漸被PLC控制電路所取代,繼電器電路中的大量的中間繼電器、時間繼電器、計時器等被PLC中的語句表、梯形圖等所替代,線路大大簡化,抗干擾能力強,設計、修改靈活方便。
在FAPT Ladder III軟件中梯形圖只能通過RS232C串口與機床數控系統連接實現在線監控和調試,無法通過軟件本身驗證梯形圖編寫是否正確性,在實驗實訓中學生沒有更加形象、直觀的印象。NI公司的Multisim12軟件具有Ladder Diagrams模塊,理解PLC順序控制的原理就能實現PLC梯形圖的仿真模擬,上手容易吸收快。
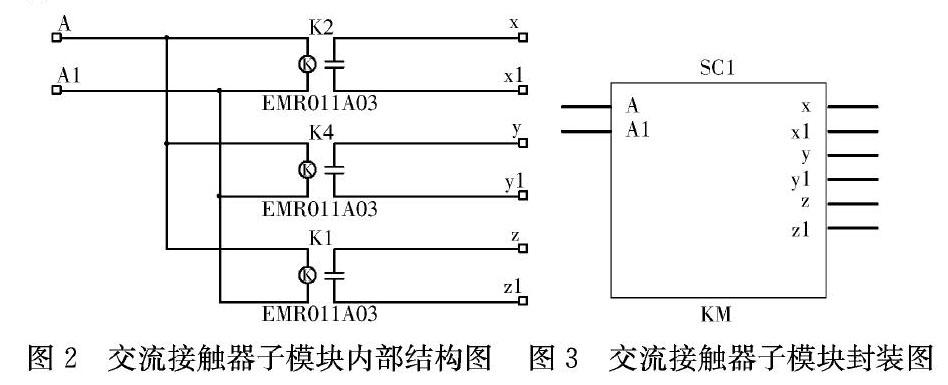
2.交流接觸器子模塊的建立
在Multisim12中沒有現成的交流接觸器模塊,文獻[3][6]采用ElectroMechanical庫中的延時繼電器TIMEDCONTACTS構建,但是仿真時總有一個時間延時;文獻[4][7]采用COILS_RELAYS中的MOTOR_4A構建,輸入輸出接口太多,仿真時不穩定。本文采用基本元件庫BASIC中的RELAY來構建,簡單易實現。為了系統顯示更加簡潔,可以建立子模塊,方法是選中各元器件鼠標右鍵通過“Replace by subcircuit”來建立子模塊,子模塊內部結構,子模塊封裝,A、A1分別是接觸器控制回路線圈的輸入、輸出端子,x、x1,y、y1,z、z1分別是交流接觸器主觸點的輸入、輸出端子。為了便于線路的連接,可通過右擊封裝Edit symbol / title block布置子模塊引腳的位置。
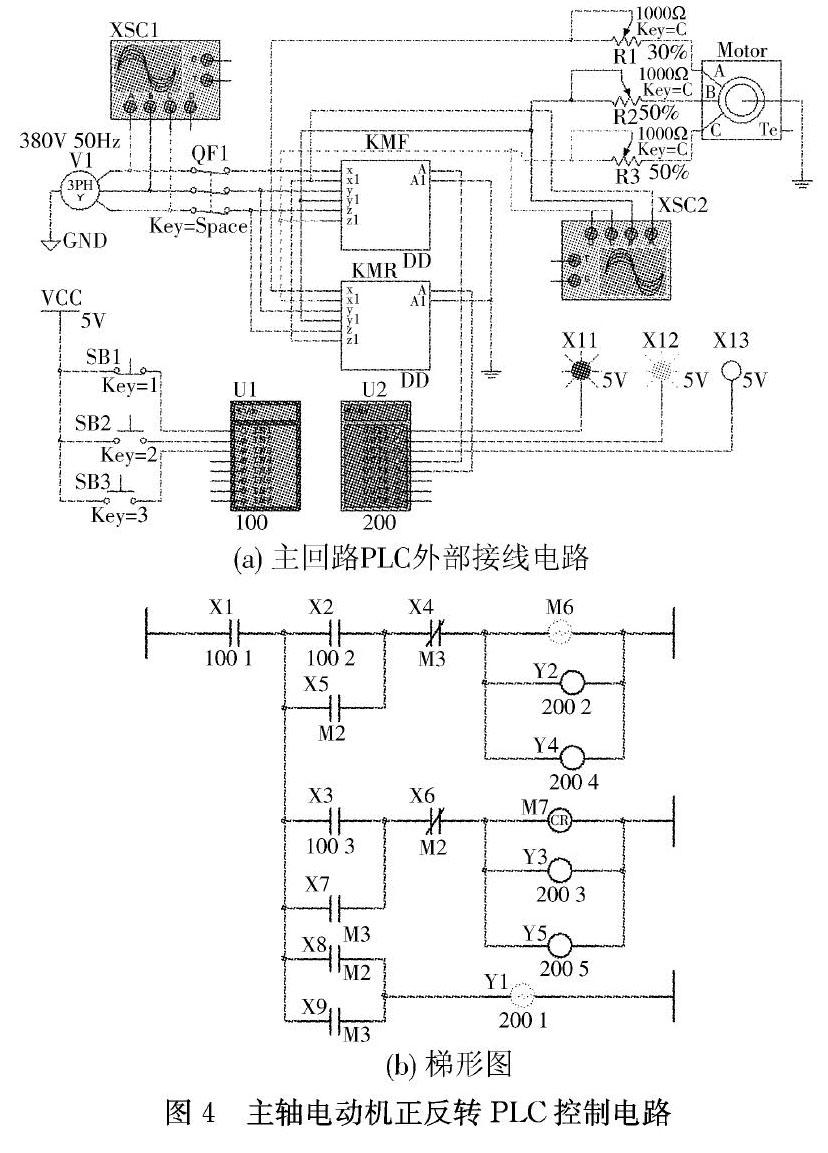
3.PLC控制正反轉仿真模型的建立
根據繼電器電路的原理圖建立基于Multisim12的PLC控制正反轉仿真模型。(a)圖中主回路電源采用380V 50HZ的Y型三相交流電源,QF1為主回路斷路器,KMF、KMR分別為主回路中控制正、反轉的交流接觸器,R1、R2、R3為三個可變電阻器,分別模擬電動機的三相負載[4]。控制回路中SB1、SB2、SB3分別為停止、正轉和反轉按鈕,U1、U2分別為PLC的I/O模塊,為了直觀反映電機的工作狀態,采用探針x11、x12、x13亮滅分別顯示電動機停止、正轉和反轉的狀態。(b)圖中x1、x2、x3分別為停止、正轉和反轉按鈕對應觸點的狀態,Y1、Y2、Y3分別為停止、正轉和反轉輸出線圈狀態。
4.PLC控制正反轉模型的仿真
點擊“Run(F5)”開始仿真:
(1)探針x11、x12、x13都不亮,示波器XSC1有電源輸入信號,如圖5所示,示波器XSC2無輸出波形;
(2)按下按鈕SB2,觸點x2閉合,中間繼電器線圈M6接通后x5自鎖,且輸出線圈Y1接通,電源探針x1(紅色)燈亮,同時輸出線圈Y2、Y4接通,Y4控制交流接觸器KMF閉合主軸電機開始正轉,Y2控制正轉探針x12(綠色)燈亮;
(3)此時按下按鈕SB3,觸點x3閉合,但是常閉觸點M2在正轉時斷開的,故反轉被互鎖。
(4)按下按鈕SB1,觸點x1斷開,中間繼電器觸點x2被解鎖,M6、Y2、Y4被線圈切斷,電源探針x1熄滅,交流接觸器KMF斷開,主軸電動機停止。
(5)按下按鈕SB3,觸點x3閉合,中間繼電器線圈M7接通后x7自鎖,且輸出線圈Y1接通,電源探針x1點亮,同時輸出線圈Y3、Y5接通,Y5控制交流接觸器KMR閉合主軸電機開始反轉,Y3控制反轉探針x13(藍色)燈亮;
(6)此時若按按鈕SB2,觸點x2接通,但常閉觸點x4被互鎖斷開,正轉無法接通。
仿真過程中電動機的三相輸入波形如圖6所示,從圖中可以看出,正、反轉的波形相序相反(粉色、綠色兩相相序相反),仿真的過程與真實電路的工作過程相一致。
三、PLC控制正反轉在數控機床主軸上的實現
在自主改造的數控銑床XK5025,數控裝置采用日本FANUC 0i系統,具有內裝式PLC,驅動裝置采用西門子MICROMASTER 420變頻器,原理圖如圖7所示。中間繼電器觸點KA3、KA4分別控制主軸電動機正、反轉,中間繼電器線圈KA3、KA4在PLC輸出回路中,如圖8所示。梯形圖如圖9所示,X10.3、X10.1、X10.0分別為主軸正轉、停止和反轉按鍵,
Y30、Y3.1分別是電動機主軸正反轉線圈,SFRA、SRVA是CW、CCW指令信號,Y7.5、Y6.4為電機正反轉指示燈,經調試,滿足數控銑床正反轉控制的要求。
四、結論
通過Multisim軟件對數控機床PLC控制電路的仿真,驗證方案設計的可行性,縮短在線調試的周期,同時在教學過程中可以離線仿真,節約教學投入成本,教學組織容易實施,避免初學者不熟悉導致硬件平臺的損壞,另外Multisim是基于Spice(Simulation Program with Integrated Circuit Emphasis)電路仿真軟件,提供非常逼真的測試儀器儀表,比如探針、安捷倫(Agilent)示波器、泰克(Tektronix)示波器等,仿真形象、直觀,學生上手容易,經過一年多的教學實踐,學生反映效果良好。
[參考文獻]
[1]王侃夫主編.數控機床控制技術與系統[M].北京:機械工業出版社,2007(08).
[2]BEIJINGFANUC PMC PA1/SA1/SA3 梯形圖語言編程說明書[Z],BEIJINGFANUC,2003.
[3]王晗.基于Multisim10的接觸器仿真設計與實現[J].實驗技術與管理.2010,3(27).
[4]聶典,李北雁等編著.基于NI Multisim 11的PLC/PIC/PLC的仿真設計[M].北京:電子工業出版社,2011(04).
[5]張錚主編.機電控制與PLC[M].北京:機械工業出版社,2008(01).
[6]王晗.基于Multisim10的三相電機正反轉控制仿真實驗[J].實驗科學與技術,2009,10(20).
[7]萬琰,謝海良.基于Multisim10的電機正反轉控制電路的設計與仿真[J].漯河職業技術學院學報,2009,9(8).
猜你喜歡
科技資訊(2016年18期)2016-11-15 20:09:22
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
企業導報(2016年6期)2016-04-21 17:56:19