基于AT89S52單片機控制的運料機器人設計
2018-02-22 06:28:28張陽利
現代食品 2018年23期
◎ 張陽利
(鄭州鐵路技師學院,河南 鄭州 450041)
隨著電子科技的發展,新的自動機器人產品不斷生產,極大地提高了勞動生產效率,減輕了工人的勞動。在食品的工業化規模化生產中,會涉及大量的原材料,如果能實現原材料的自動運料,將大大縮短生產周期,解放更多的勞動力,降低生產成本。基于此目的,設計了一種智能式運料機器人,此機器人運用AT89S52單片機控制。本文將對運料機器人的任務設計、方案設計、模塊設計、系統硬件設計以及軟件設計5個階段進行簡要的分析介紹[1-2]。
1 設計任務
智能運料機器人是根據光電傳感器檢測周圍環境,通過驅動、傳動和導向執行元件配合,從而實現從啟動小車→黑白尋跡→進入迷宮和避障→按規定路線行駛→運料→運動翻轉作業→卸料的自動化。
2 總體方案設計

圖1 總體設計方案功能圖
采用AT89S52單片機作為控制單元,AT89S52是一種低功耗、高性能的微控制器,在單芯片上,擁有靈巧的8位CPU和在系統可編程Flash,可為眾多嵌入式控制應用系統提供靈活、有效的解決方案。可對以下幾個系統進行控制:尋跡避障系統、電機驅動、儀表顯示、電源控制、速度控制和信號的轉換等[3]。總體方案功能如圖1所示。總體方案設計如圖2所示。

圖2 總體方案設計圖
3 模塊設計
3.1 行走方案確定
小車的行走可以采用履帶式小車、輪子式小車或支腿式小車。考慮設計原則和功能,采用輪子式小車為行走方案比較合理。既可以有很好的轉向,其結構也相對簡單。根據環境特點,需要采用3輪結構,一個萬向輪做從動輪,其余兩個并排的輪做驅動輪,以實現靈活轉向。
3.2 電機的設計
電機可以采用直流電機,也可以采用同步交流電機。根據電源配置,選用普通直流電機較為合適,直流電機能實現直流電能和機械能互相轉換,具備良好的調速性能,利于運料機器人的啟動和制動[4]。
3.3 電機驅動方案的選擇
電機驅動采用橋式電路。單片機很好控制晶體管的截止和導通,以選擇接通電機電路,實現電機運轉和停止。步進電機控制電路如圖3所示。
3.4 供電電源方案的確定
供電電源可以采用兩個電源,一路是給電機直接供電,另一路是給控制電路供電。也可以用一個電源,分為兩路分別給電機和控制電路供電。為了減輕智能機器人的質量,本設計采用一個電源。
3.5 路面情況檢測方案的確定

圖3 L298電機控制電路圖
路面的檢測可以采用兩種傳感器。一種是聲波傳感器,采用雷達系統,實現聲波信息的形成、傳輸、接收、變換、處理和應用。另一種是光電傳感器,采用發光二極管做光源,光敏二極管接受信號。前一種會影響接受速度,也有自然光的干擾。因此本設計采用光電式傳感器,發射和接收紅外射線,這種傳感器的優勢在于反應靈敏且干擾小,電路簡單[5]。
3.6 障礙物探測方案的設計
采用紅外線發射接收裝置。紅外線發射裝置是一種遙控設備,具有遙控功能,它通過紅外線發射管在一定范圍內向外發射光線,從而達到控制信號的作用。
3.7 運料作業機構方案的設計
采用偏心輪四桿機構。電機力矩較大,具有低轉速、大扭矩、過載能力強、響應快、特性線性度好以及力矩波動小等特點,且易于控制。運料機構如圖4和圖5所示。
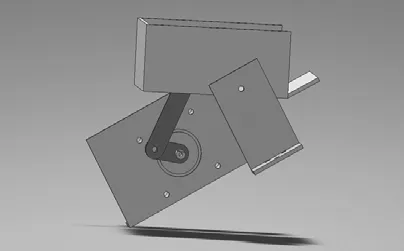
圖4 四連桿翻斗機構圖

圖5 運斗機構在小車上的布置圖
4 系統硬件設計
4.1 路面黑線檢測的設計與實現
4.1.1 黑白線探測
路面的檢測通過光電傳感器實現。黑白線傳感器的有效檢測距離為5~10 cm。具有自然光干擾小,信號處理簡單的優點。另外可以增加調節距離的裝置,提高測量精度。
4.1.2 黑白線循跡方案
在AT89S52單片機上連接P3.5和P2.0兩個端口,并分別連接一個發光二極管。兩個發光二極管布置在運料小車的底盤下端,左右各一個,呈一定角度分開。當發光二極管發出紅外線后,照射到白線后會被反射回來,被光敏二極管接收到,輸出一個低電平信號。同樣當紅外線照射到黑線后,由于光線被黑線吸收不能返回,接收管不能收到信號,于是輸入一個高電平。經過AT89S52單片機的信息處理,使運料小車沿規定路線行駛。
4.2 電動機驅動電路設計與實現
電動機驅動電路采用集成電路芯片L298。
L298的控制:VS作為電源輸入,VSS為控制電源信號輸入,為+5 V電壓,IN1-IN4四個引腳控制H橋的通斷,采用標準TTL邏輯電平信號。集成電路采用塑料封裝,SGB公司制造。表1為L298控制表。Multiwatt15如圖6所示。

圖6 Multiwatt15引腳圖和封裝圖

表1 L298控制表
5 軟件設計
迷宮避障設計的控制如圖7所示,黑白尋跡控制如圖8所示。

圖7 迷宮避障流程圖

圖8 黑白尋跡流程圖
6 結語
按照設計思路,經過任務設計、方案設計、模塊設計、系統硬件設計、軟件設計以及購買零部件組裝等一系列工序,完成了AT89S52單片機控制的智能式機器人的制作。對智能機器人的功能進行測試,均能正常運行,改變程序中的電阻值大小,可以改變小車運行速度,實現運料機器人在正確路線上的運輸行駛和翻斗卸料作業。
當前使用機器人代替人力已成為生產趨勢,相比人力,機器人能提高生產效率,運料機器人將在制造業的生產線中大顯身手,高效、準確、靈活地完成物料的搬運。因為搬運機器人的并行作業、自動化、智能化和柔性化的特性能夠很好地滿足一般場合的搬運要求,相信以后會得到大范圍推廣。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:48:04
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:27
