一種應用于智能照明系統的滅火機器人設計
2018-02-23 16:02:28孫萬利
科技創新與應用 2018年6期
關鍵詞:照明
孫萬利


摘 要:在智能照明系統中,一旦發生火災,可用滅火機器人及時準確地找到火源并滅火。文章針對照明系統設計出一種滅火機器人,這種基于AS-MF09特殊環境的滅火機器人可以很好地滿足要求,及時準確地在危險的環境執行滅火任務。
關鍵詞:照明;火災;機器人
中圖分類號:TP242 文獻標志碼:A 文章編號:2095-2945(2018)06-0105-02
Abstract: In the intelligent lighting system, once there is a fire, the fire extinguishing robot can find the fire source and extinguish the fire accurately in time. In this paper, a fire-extinguishing robot is designed for lighting system. This kind of fire-extinguishing robot based on AS-MF09 special environment can meet the requirements well and execute fire extinguishing task in dangerous environment in time and accurately.
Keywords: lighting; Fire; Robot
前言
在智能照明系統中,照明系統的安全性是重中之重。當發生電氣火災后,我們要及時準確的發現著火點,并在第一時間撲滅火源。但是,電氣火災的產生環境比較復雜,尤其是當火災附近有帶電導體的時候,消防人員在滅火過程中的危險性是巨大的。為了減小消防人員的危險性,文章主要研究在電氣火災的滅火過程中所應用的一種智能滅火機器人。
滅火機器人的首要任務是以最快的速度找到火源,并且在盡量短的時間內將其撲滅,所有的處理過程都是在自動控制的前提下進行的。滅火機器人的總體結構主要由控制器、傳感器輸入、驅動輸出等模塊組成[1]。機器人使用了低壓電源和高壓電源兩個電源,其中,滅火風扇以及控制器所使用的電源為低壓直流電源,控制輪胎運行的電機使用的為高電壓直流電源。
1 紅外測距傳感器
在此設計中,傳感系統的主要作用是檢測障礙物,主要是來自前方以及右前方和左前方。傳感系統由一個紅外接收模塊和兩個紅外發射管構成。紅外傳感器也是目前使用比較普遍的一種避障傳感器,兩個電位器,可調節兩個紅外傳感器的檢測距離為10~80m[2]。開關量輸出(TTL 電平),簡單、可靠。
2 AS-MF09復眼
AS-MF09復眼非常適合滅火項目。具有7個通道,180度掃描范圍,并可以同時兩個復眼合并使用,覆蓋360度范圍[3]。
3 AS-MF09指南針
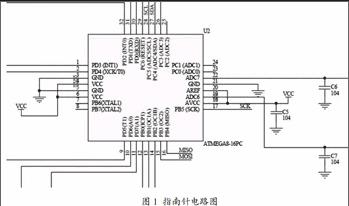
在設計中,采用的AS-MF09指南針可以指示16方向,并通過I2C總線輸出到MF09控制器上,精度高達1度,并且非常穩定,整體外觀呈圓形,直觀易于使用[4]。指南針電路連接圖如圖1所示。
我們能看到指南針接口,它是一種叫I2C總線的接口,控制器通過該總線連接指南針。具體操作:指南針每次到新的環境中使用,都需要進行消磁和置零點操作。當打開控制器電源,看到指南針的方向指示燈點亮后,就可開始進行以上操作。
4 AS-MF09大功率驅動電機
AS-MF09大功率電機驅動器是新一代的適合高電壓大電流電機的驅動控制模塊。每個驅動器模塊含有兩路電機驅動單元。在24V高電壓輸入下能穩定工作。并且帶有電源開關和狀態指示。
單個MF09控制器可以連接2塊電機驅動卡,可以先連接控制器上標示的(D1,P1,D2,P2)接口。
在MF控制器上有PWM0和PWM2 兩個端口,將它們連接到驅動器的信號輸入接口,需要仔細查看MF09控制器上的PWM接口的定義。
5 結束語
在硬件電路組裝成功以后,還需要有軟件控制部分。圖形化交互式C語言(簡稱VJC)是用于能力風暴智能機器人系列產品的軟件開發系統,具有基于流程圖的編程語言和交互式C語言[5]。對所設計的滅火機器人寫入程序,機器人就能夠按照設定,準確快速地進行滅火實驗了。
參考文獻:
[1]孫驍苗,周東輝,栗欣,等.移動機器人的多傳感器測距系統設計[J].傳感器與微系統,2006(2):55-57.
[2]浦定超.基于遺傳算法的移動機器人路徑規劃的研究[D].合肥工業大學,2011.
[3]張振龍,王福財.一款教育機器人控制系統設計[J].中國畜牧獸醫文摘,2012(6):136.
[4]莊全文.面向群機器人協調控制研究的原型系統設計[D].太原科技大學,2013.
[5]林小杰,吳凡.滅火機器人競賽中火焰搜索路徑的設計與實現[J].浙江樹人大學學報(自然科學版),2014(1):9-12.
[6]劉佳強,姜培剛.基于C#的直角坐標機器人控制系統的研究和實現[J].科技創新與應用,2016(22):52-53.
[7]鄭韻婷,魏國棟.基于高性能IO模塊的仿生機器人控制系統設計與實現[J].科技創新與應用,2016(02):1-3+8.
猜你喜歡
建筑建材裝飾(2016年14期)2017-01-05 01:32:34
科學家(2016年3期)2016-12-30 00:26:05
現代商貿工業(2016年11期)2016-12-26 09:54:10
戲劇之家(2016年23期)2016-12-20 22:33:46
青春歲月(2016年21期)2016-12-20 20:12:07
文藝生活·中旬刊(2016年11期)2016-12-13 21:43:41
科學與財富(2016年28期)2016-10-14 19:38:21
科技視界(2016年24期)2016-10-11 10:13:18
現代經濟信息(2016年4期)2016-06-20 22:10:18
企業導報(2016年8期)2016-05-31 18:54:00