基于低開關頻率的特殊脈寬調制技術研究
2018-02-25 03:44:00徐魯輝
鐵路技術創新 2018年6期
關鍵詞:調試
■ 徐魯輝
0 引言
在軌道交通牽引控制系統中,牽引變流器所承受直流側供電母線電壓較高,其輸出功率也較大。牽引變流器通常會選擇電壓等級較高的功率模塊,如3 300 V模塊或6 400 V模塊。高壓功率模塊的開關損耗和散熱制約了其開關頻率的應用,其開關頻率較低(一般低于1 kHz)。為滿足功率模塊的低開關頻率限制和軌道車輛寬范圍調速運行的要求[1-3],牽引變流器驅動動力電機時一般采用多模式脈寬調制技術,即低頻段采用異步調制(SVPWM)、中頻段采用同步調制(非優化PWM或優化PWM)、高頻段采用單脈沖控制的多模式混合脈寬調制技術(見圖1)。僅在低速段采用SVPWM調制控制技術,當電機轉速繼續升高時,不能滿足條件(開關頻率/電機電頻率>15),如果繼續采用SVPWM調制技術,電機諧波轉矩會顯著增大,控制穩定性變差。一般采用同步脈寬調制(優化PWM或非優化PWM調制技術)以保證三相電流波形對稱,降低尖峰電流和轉矩脈動,也可以自然過渡到高頻段時的方波控制(單脈沖調制)階段[4-6]。
實際工程實踐中多模式混合脈寬調制異常復雜。工程實現時,脈沖發波方式需根據負載牽引電機轉速多次變換,同時必須保證各調制模式間的平滑過渡,避免引起牽引電機電流和功率的沖擊,這些工程實現方法及處理手段一直以來是牽引控制系統的核心技術。
軌道牽引傳動動力系統目前主流使用異步牽引電機驅動控制系統,可查到的文獻也多是異步牽引電機方面,永磁牽引電機控制技術鮮有文獻涉及。可根據永磁同步電機控制在工業和電動汽車上應用經驗和異步牽引電機控制方面的文獻進行相關永磁牽引電機控制技術的研發。其開發主要難點在于:低開關頻率下電機控制性能研究、牽引逆變器單脈沖調制輸出電壓飽和情況下牽引電機轉矩控制、低開關頻率下數字控制時延影響、失效模式處理、帶速重投等。一些在電動汽車驅動控制過程中未曾遇到的問題可能會在低開關頻率下的牽引傳動中顯現[7],主要關注低開關頻率下特殊脈寬調制技術在永磁同步牽引電機上的應用。

圖1 多模式混合調制技術示意圖
1 特定諧波消除脈寬調制技術
在牽引動力控制系統中,脈寬調制技術的優劣直接影響牽引傳動系統的性能。在特殊同步調制方面,主要有非優化PWM技術(如中間60°SPWM調制技術)和優化PWM技術(如SHEPWM調制技術)在永磁同步牽引電機中的應用[1-2]。
特定諧波消除技術(SHE)較為廣泛應用于受開關損耗限制的大功率驅動系統,特定諧波消除脈寬調制技術可實現功率模塊極低的開關頻率,同時消除指定低次諧波。其工程實踐首先需將SHEPWM的開關角離線進行計算,通過傅里葉分解得到超越方程組,對方程組進行求解,獲得相應開關角度值,該開關角度值可在離線仿真中進行驗證。特定諧波消除技術因計算量較大,很難在線實時求解,為了芯片運行效率與控制實時性,工程實踐中通常將開關角存儲在程序中,以便在線查表備用。以11分頻、7分頻、5分頻、3分頻為例,建立相應的超越方程組[7-8],求解獲得的開關角見圖2。
基于存儲于芯片中的開關角度,在控制牽引電機運行時,可通過調制度、電壓相位、旋轉角度查到相應開關角,以重新構建PWM脈沖序列,從而實現電機控制。11分頻、7分頻、5分頻、3分頻1個周期內的脈沖序列見圖3。
2 仿真分析
基于Simulink搭建相應永磁同步電機牽引控制仿真模型,對SHEPWM控制算法進行仿真驗證,當電機運行在3 000 r/min下,以7分頻、11分頻為例進行相關調試。電流開環控制狀態下,給定電壓Ud=-240 V,Uq=200 V,仿真獲得各分頻下電流波形情況見圖4、圖5。
當電機運行在3 000 r/min下,以7分頻為例對電機閉環控制進行仿真調試,給定電流Id=-212 A,Iq=100 A時,仿真獲得7分頻下的扭矩輸出情況和交直軸電流情況見圖6、圖7。
3 各分頻間切換仿真

圖2 各分頻下開關角

圖3 各分頻的1個周期內脈沖序列

圖4 三相電流@7分頻開環控制

圖5 三相電流@5分頻開環控制
采用多模式混合脈寬調試方式,需考慮不同模式間的切換過渡問題,為了保證切換過程中盡量減小電流沖擊,在切換點前后不僅需保持基波電壓相位的連續性,還要保證諧波電流的相位連續性。SVPWM異步調制切換到SVPWM同步調制方式的切換實現相對較容易,因為在切換點前后載波頻率相同,切換點選擇在任意時刻都不會引起電流較大沖擊,實踐過程中各種變載波控制的應用也驗證了該切換方法的實用性。同步SVPWM調試方式切換到SHEPWM特定消諧方式的過程中,需考慮三相電壓基波都要保持連續性, SHEPWM調制方式在不同分頻間切換時,也需考慮三相電壓基波的連續性。
在仿真模型中設定好不同分頻間的切換,運行過程中,自動進行11→7→5→3分頻間的切換。切換相位要根據實際調試情況來定,以使其電流和電壓連續,從而減小扭矩沖擊。可對切換相位進行微調[9-10],在此選擇切換相位為290°,仿真獲得相應的三相電流波形與切換標識見圖8,電機輸出的電磁扭矩波形見圖9。
4 基于硬件在環的控制算法調試
根據分析可知,依據電機矢量控制時得到的電壓相位、調制度及轉子旋轉角度可重構輸出PWM脈沖序列,基于電機控制板進行工程實現后,應用硬件仿真平臺實現半實物的電機閉環控制,對電機控制過程進行相關測試[7-8]。

圖6 三相電流@7分頻開環控制

圖7 dq軸反饋電流@7分頻

圖8 切換前后的三相電流波形與切換標識
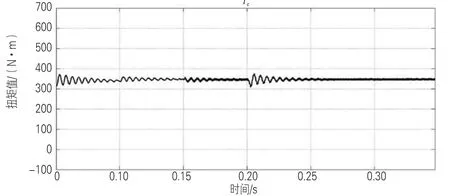
圖9 電機輸出電磁扭矩
基于某款電機模型,使用相同電流指令,對比100 μs控制周期下SVPWM調制技術得到的扭矩及波形情況與7、5、3各分頻下的扭矩及波形情況,SHEPWM各分頻下獲得波形符合預期,且各模式下相同扭矩指令所得到的扭矩響應基本一致。電機在500 r/min、370 N·m狀態下對不同分頻進行測試,電機輸出扭矩見圖10。電機三相電流波形見圖11。需要注意的是,測試中所采集的扭矩波形圖是HIL仿真模型中的電機電磁扭矩,未經濾波處理。經過實際轉動慣量濾波后,扭矩的波動會得到一定改善,尤其是軌道交通機車慣量較大的情況下,電機輸出扭矩的波動會被有效抑制。
在硬件在環測試過程中,對HIL設備和控制板硬件通道的信號通過示波器采樣情況進行記錄。HIL仿真時,其電流通道和PWM波輸出通道采樣波形見圖12、圖13,其效果與離線仿真基本一致,符合預期。
使用目前的電機調試參數在不同分頻下測試了扭矩的響應情況,扭矩響應可做到1.0~1.5 s。目前在硬件在環設備上調試獲得的扭矩響應情況見圖14。電機控制參數還可根據實際情況進行調試優化,在控制系統穩定運行的前提下可進一步提高響應速度,但由于所使用的SHEPWM脈寬調制技術本身就是在基于穩態得到的開關角構建的脈沖序列,故其控制輸出扭矩的響應會受一定制約。達不到電動汽車驅動控制系統在高開關頻率下SVPWM調制方式的快速高性能的扭矩響應。
5 結束語
通過對特殊脈寬調制技術的理論分析與研究,求解非線性超越方程,對SHEPWM的開關角進行計算并獲得了相應開關角度。離線存儲在程序中,可實現低頻率下的控制,在開環模式下,實施VVVF控制,獲得相應各分頻下的電流波形;在閉環模式下,實施矢量控制,獲得相應各分頻下的電流扭矩波形。SHEPWM多模式間進行切換仿真,獲得相應切換情況,切換時相位可以根據實際情況微調,可達到較好的預期效果。基于DSP芯片工程基本實現了SHEPWM脈寬調制技術在中頻段的應用,在HIL上進行半實物仿真,其輸出扭矩及波形情況符合預期。相同指令下,SVPWM調制技術所獲得的扭矩與SHEPWM調制技術所獲得扭矩基本一致。極低開關頻率下的SHEPWM調制技術指令響應不如高頻率下SVPWM的快,合理的參數會讓SHEPWM調制穩定運行。此算法的研究可為軌道牽引系統控制研究提供參考。

圖10 各調制方式下的扭矩波形@500 r/min、370 N·m

圖11 各調制方式下的電流波形@500 r/min、370 N·m

圖12 3、5、7分頻下的波形@500 r/min、370 N·m
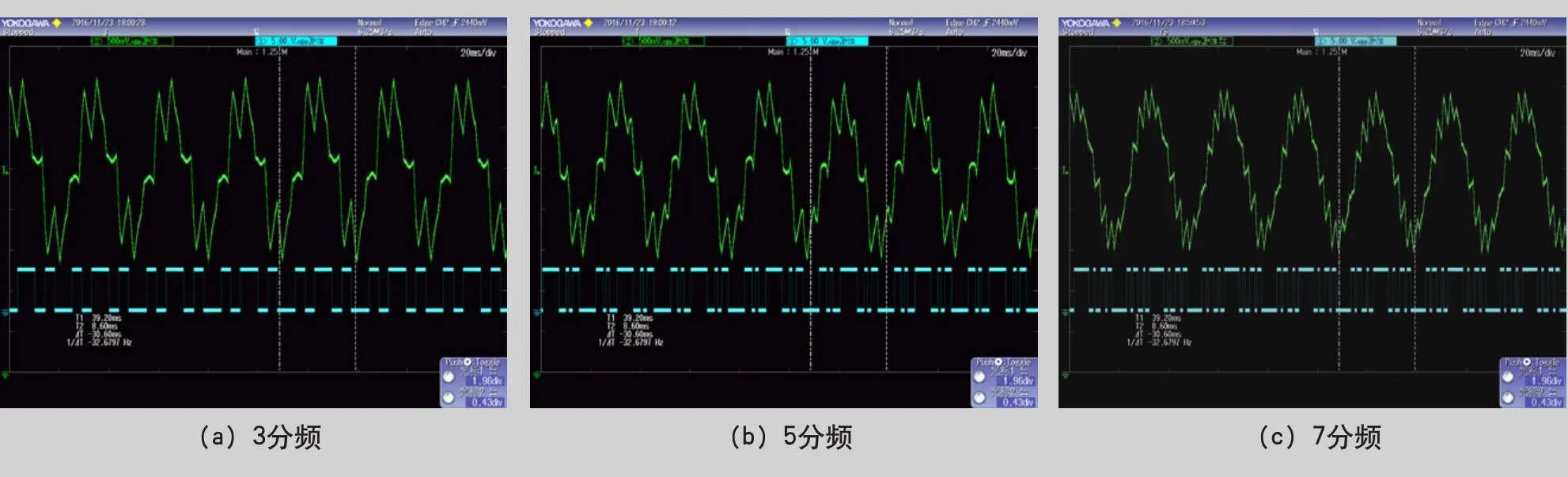
圖13 3、5、7分頻下的波形@500 r/min、1 500 N·m

圖14 各調制方式下的扭矩響應情況@500 r/min、200~1 500 N·m
猜你喜歡
電子制作(2018年12期)2018-08-01 00:47:44
石油化工建設(2018年1期)2018-07-10 09:49:50
制造技術與機床(2017年6期)2018-01-19 02:41:21
中國核電(2017年1期)2017-05-17 06:10:11
電子制作(2017年19期)2017-02-02 07:08:38
當代化工研究(2016年6期)2016-03-20 16:21:46
中國房地產業(2016年2期)2016-03-01 01:25:18
西部廣播電視(2015年5期)2016-01-16 03:45:05
石油化工建設(2015年5期)2015-12-01 04:17:19
電子設計工程(2015年3期)2015-02-27 12:04:00