飛機平尾操縱系統偏離特性試飛驗證方法研究
2018-02-28 03:00:20方自力韓意新袁廣田
科技與創新 2018年4期
方自力,韓意新,袁廣田
(中國飛行試驗研究 飛機飛行試驗研究所,陜西 西安 710089)
某型飛機飛參數據記錄顯示,在大過載飛行狀態下,飛機平尾偏度與縱向桿位移的對應關系偏離設計值,如圖1所示。飛機飛行數據如圖2所示,在大表速完成大過載飛行時,平尾舵面偏度和駕駛桿位移的對應關系偏離設計狀態,舵面實際偏度大于設計值。平尾操縱系統的偏離特性對于飛機的操縱特性和飛行安全有著重要的影響。國內外針對操縱系統偏離特性的試驗驗證主要集中在地面試驗,使用地面操縱系統試驗檢查桿舵對應關系及其遲滯效應,保證在地面靜止狀態下飛機的操縱系統對應關系滿足設計值。而在真實飛行狀態下,飛機受到大過載、大速壓的影響,操縱系統的對應關系可能出現偏離情況。本文提出的機械操縱系統偏離特性的空中試飛驗證方法,解決了操縱系統特性關鍵參數測試校準、空中驗證試飛方法等難題。
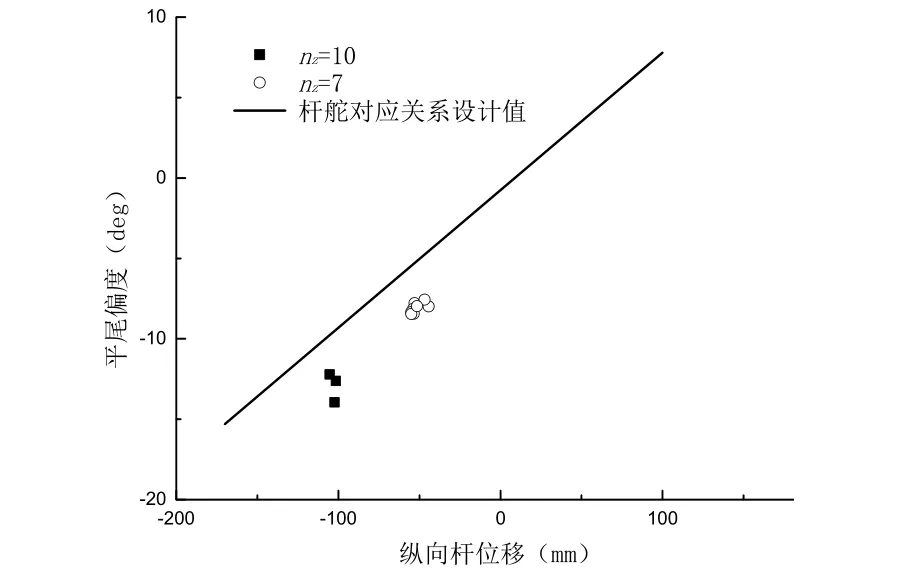
圖1 大過載條件下的桿舵對應關系
1 平尾操縱系統偏離簡介
某型飛機的操縱系統為機械操縱系統,縱向駕駛桿通過機械傳動鏈帶動控制閥,借助液壓動力作動器或者助力器帶動舵面偏轉產生偏度,如圖3所示。在飛行狀態下,飛行員操縱駕駛桿,機械傳動鏈帶動作動筒使平尾產生偏度,平尾升力變化產生俯仰力矩,飛機產生縱向角運動,也即抬頭或者低頭。由于飛機的飛行高度和速度的變化范圍大,在不同速壓下,單位平尾偏度產生的俯仰力矩不同。在大速壓飛行時,平尾偏度變化會產生較大的俯仰力矩,飛機的角運動較為劇烈;在小速壓飛行時,平尾偏度變化會產生較小的俯仰力矩,飛機的角運動較為緩慢。為了保證飛機縱向操縱的協調性,飛機平尾操縱系統安裝力臂調節器,它接受由飛機空速管傳來的動、靜壓,根據其大小自動地改變駕駛桿到平尾及駕駛桿到載荷機構的傳動比。
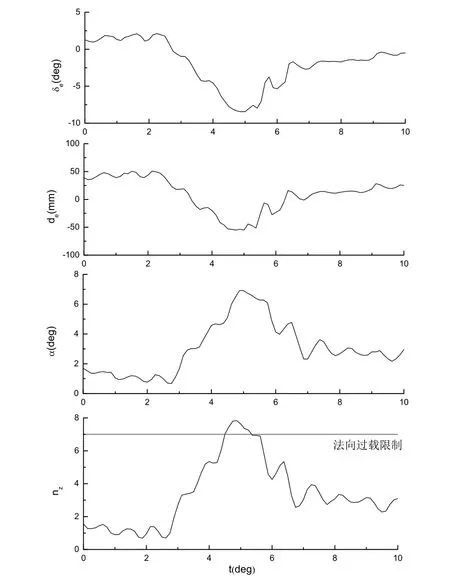
圖2 某型飛機過載超限時間歷程
根據飛機平尾操縱系統的設計,在表速大于1 000 km/h的飛行狀態,飛機的縱向桿位移與平尾偏度的對應關系應處于小臂狀態,駕駛桿到平尾偏度的傳動比較小;在表速小于500 km/h的飛行狀態,飛機的縱向桿位移與平尾偏度的對應關系應處于大臂狀態,駕駛桿到平尾偏度的傳動比較大,如圖4所示。飛行速度位于500~1 000 km/h之間時,傳動關系處于大臂與小臂中間。某型飛機飛參數據顯示,在表速1 000 km/h、過載大于7時,飛機的平尾操縱系統偏離設計值,舵面偏度比設計值大2.5°。由于飛參數據記錄的平尾偏度、縱向桿位移、臂值、引動量等參數的測量可能存在誤差,飛參數據不能充分證明平尾操縱系統的偏離特性,因此,有必要開展系統的操縱系統偏離特性試飛驗證研究。

圖3 某型飛機操縱系統示意圖
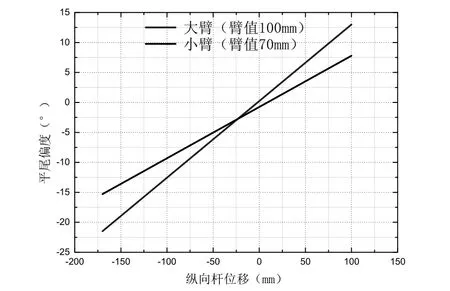
圖4 大小臂狀態桿舵關系設計值
2 平尾操縱系統偏離特性試飛驗證
2.1 平尾操縱系統關鍵參數測試及校準
為滿足測量精度需求,針對飛機平尾操縱系統加裝高精度線位移傳感器,分別測量縱向桿位移和平尾偏度,并保持縱向桿位移與平尾偏度的協調一致性。但是由于機械系統間隙等因素,測量值可能存在誤差,因此,必須開展地面操縱系統試驗,以試驗結果為基準進行數據修正。
地面操縱系統試驗獲得縱向桿位移與平尾偏度的對應關系如圖5所示,從試驗結果可以看出,平尾偏度與縱向桿位移的對應關系存在明顯的滯環效應。為了消除滯環效應,采用緩慢勻速推拉桿的方法,保持約2 mm/s的速率進行重復試驗,獲得的縱向桿位移與平尾偏度對應關系明顯改善,如圖6所示。但是由于機械系統間隙的原因,測量結果與設計值還存在一定的誤差。為了消除測量誤差,進行了多次操縱系統地面試驗,并且對試驗數據進行擬合,根據擬合結果與設計值進行對比,從而對測量的平尾偏度進行了校準,得出以下修正公式:

修正后的平尾偏度與縱向桿位移對應關系與設計值的對比如圖7所示。消除滯環效應和擬合修正后的平尾偏度與縱向桿位移的對應關系基本與設計值重合,達到了關鍵測量參數的精度要求。為了進一步驗證地面操縱系統試驗結果的準確性,有必要使用空中試飛數據對地面試驗結果進行校驗。選取起飛階段的桿舵對應關系進行驗證,起飛階段飛機的速度較小(小于475 km/h),法向過載平穩(0.8~1.6),在基本可以排除過載和速壓對操縱系統偏離的影響的條件下,平尾操縱系統的對應關系應當處于大臂狀態,結果如圖8所示。
測量得到的起飛狀態平尾偏度與縱向桿位移的對應關系與設計值符合度良好,成功驗證了平尾操縱系統的桿舵對應關系測量結果的精度。
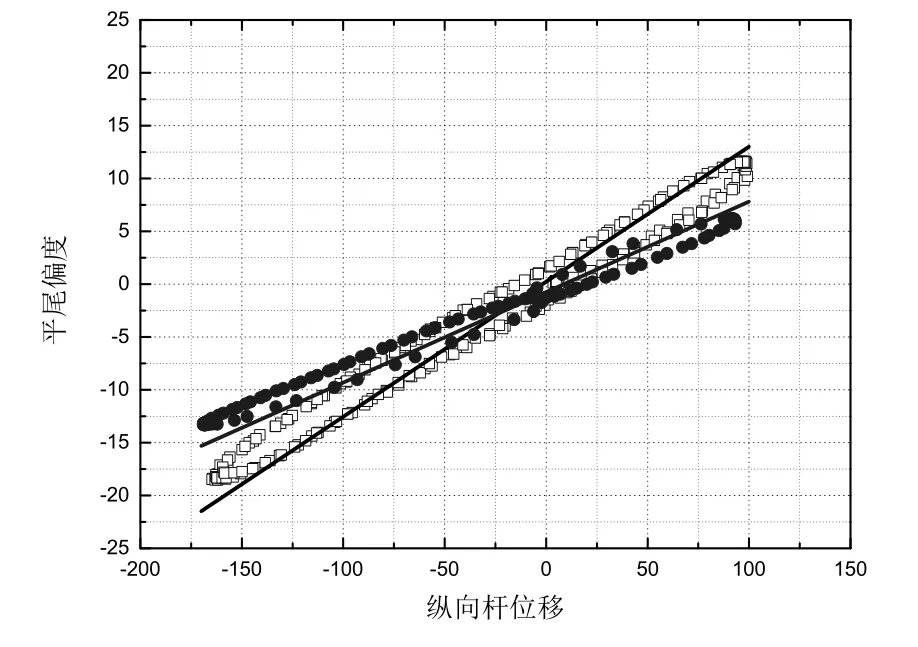
圖5 存在測量誤差的桿舵對應關系
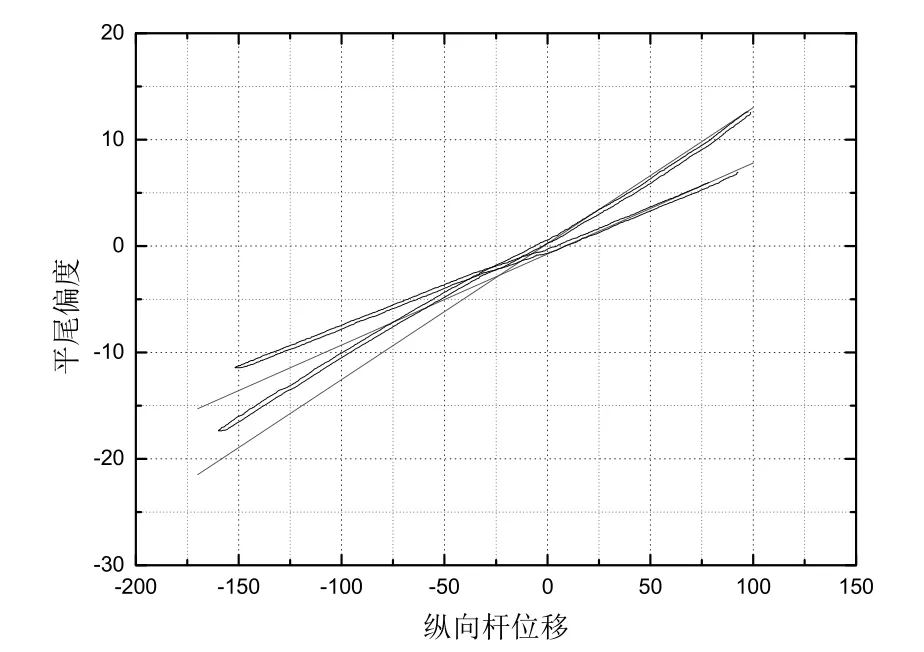
圖6 消除滯環效應后的桿舵對應關系
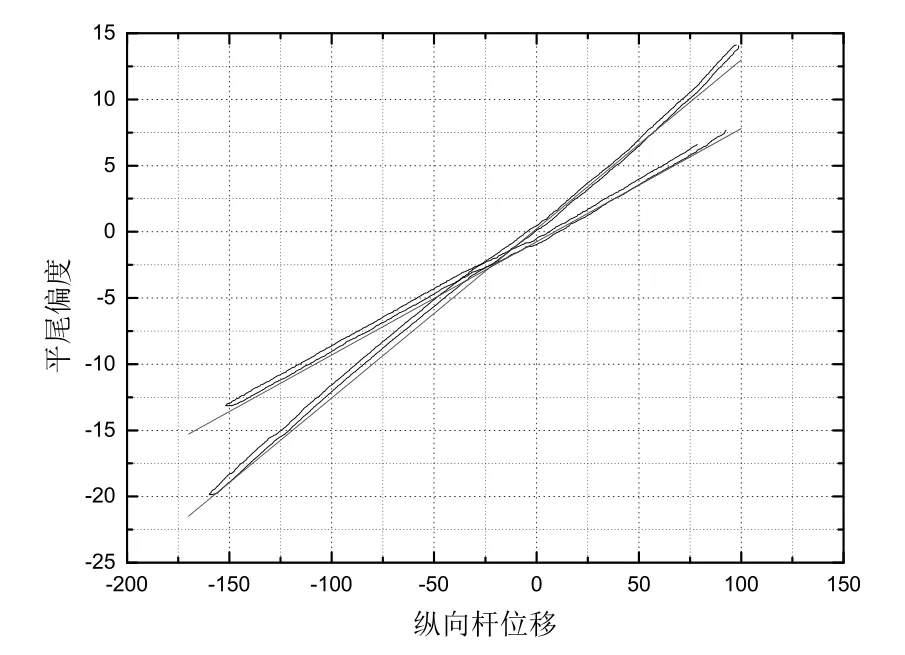
圖7 經過擬合修正后的桿舵對應關系
2.2 平尾操縱系統偏離特性空中驗證試飛
在保證試飛安全的前提下,逐步增加飛行速度和法向過載,充分驗證飛機操縱系統在大過載下的偏離特性。
驗證試飛分為以下2個部分。
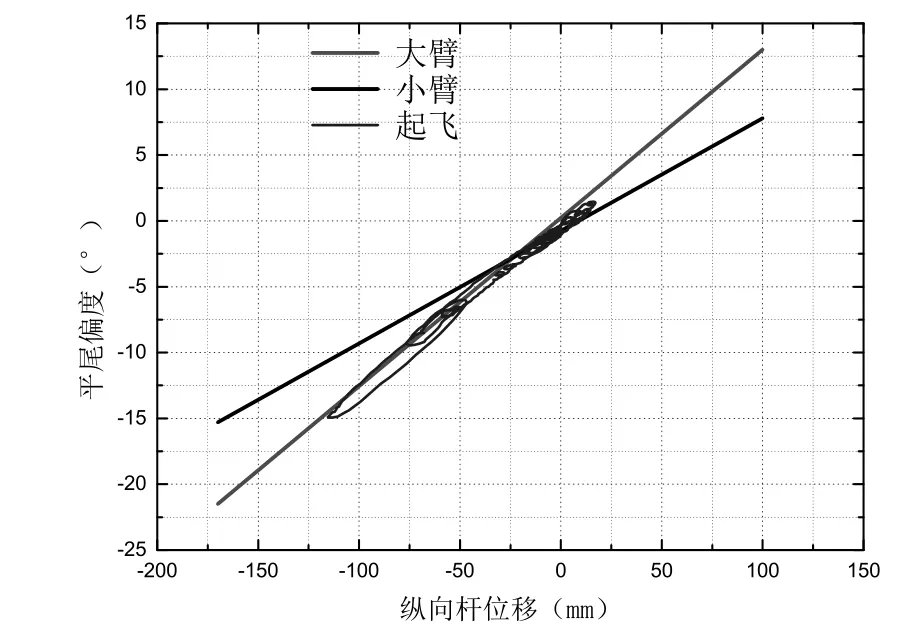
圖8 起飛階段平尾偏度與縱向桿位移的對應關系

圖9 穩定飛行中平尾操縱系統對應關系與設計值對比
2.2.1 穩定飛行中檢查平尾操縱系統的偏離特性
氣壓高度5 000 m,完成表速500 km/h→1 000 km/h→500 km/h平飛加減速試飛,加減速過程中保持法向過載為1,縱向桿位移隨著飛行速度的增加逐漸從拉桿(負值)變為推桿,從而達到驗證平尾偏度在穩定平飛中平尾操縱系統的偏離特性的目的,試飛結果如圖9所示。縱向桿位移的變化范圍約為-15~+40 mm,平尾偏度變化范圍為-1.5°~+3°,符合小臂狀態的設計值,基本無偏離現象。由于在穩定飛行中,飛機的平尾偏度和縱向桿位移的變化范圍均較小,上述結果只能證明在小幅值操縱范圍內平尾操縱系統的偏離特性不大的結論,因此,需要進一步開展機動試飛,驗證過載對操縱系統偏離特性的影響。
2.2.2 機動飛行中平尾操縱系統偏離特性驗證
場高1 000 m,在不同速度飛行時,采用對稱拉起、穩定盤旋等試飛方法逐步增加法向過載,獲取帶過載飛行條件下平尾偏度和縱向桿位移的對應關系曲線。試驗結果如圖10所示,隨著速度和法向過載的增加,平尾偏度和縱向桿位移的對應關系與設計值的偏離量會逐漸增大,實際測得的平尾偏度比設計值整體往負方向平移,即拉桿會產生更大的平尾偏度。在場高1 km、表速1 000 km/h、法向過載5.2時,平尾偏度與設計值相比最大偏移量約-2.1°,與圖1所示飛行結果趨勢吻合。
3 結論
本文開展了飛機平尾操縱系統偏離特性試飛驗證方法研究,采用的測試方法和校準方法準確,試飛方法科學、合理,數據處理方法明確反映了平尾操縱系統的偏離特性,成功驗證了某型飛機平尾操縱系統大過載下的偏離特性。
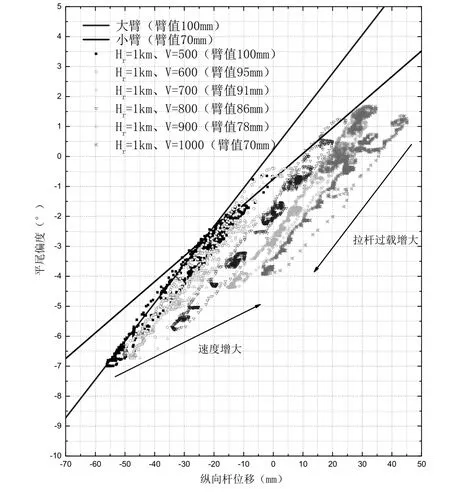
圖10 場高1 000 m不同速度和過載下的桿舵對應關系曲線
[1]Xi Feng,Wu Zhimin,Li Wei,et al.Analysis on Directional Deviation Characteristic for Mechanism Control System.Measurement&Control Technology,2017,36(2):141-144.
[2]徐鑫福.飛機飛行操縱系統[M].北京:北京航空航天大學出版社,1989.
[3]胡兆豐,何值岱,高浩.飛行動力學:飛機的穩定性和操縱性[M].北京:國防工業出版社,1985.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
環球時報(2022-05-30)2022-05-30 15:16:57
直升機技術(2021年4期)2022-01-12 13:18:12
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2019年11期)2019-06-24 03:40:28
民用飛機設計與研究(2019年4期)2019-05-21 07:21:30
大飛機(2018年1期)2018-05-14 15:59:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
