一種基于藍(lán)牙的場(廠)內(nèi)機(jī)動(dòng)車智能檢測系統(tǒng)
2018-02-28 05:27:13余志林
中國特種設(shè)備安全 2018年1期
余志林 毛 堃
(衢州市特種設(shè)備檢驗(yàn)中心 衢州 324000)
場(廠)內(nèi)機(jī)動(dòng)車分布在各個(gè)不同地方,這就要求檢測設(shè)備必須方便攜帶[1-3]。現(xiàn)有的場(廠)內(nèi)機(jī)動(dòng)車檢測設(shè)備往往需要人工讀取所測數(shù)據(jù),并錄入到對應(yīng)的檢測報(bào)告中,檢驗(yàn)人員的工作量大且容易出錯(cuò),不能實(shí)現(xiàn)從檢測到數(shù)據(jù)錄入報(bào)告的全自動(dòng)化[4],因此,設(shè)計(jì)一種方便攜帶的智能化檢測系統(tǒng),對于提高工作效率,保證安全檢測是非常必要的。
1場(廠)內(nèi)機(jī)動(dòng)車智能檢測系統(tǒng)總體設(shè)計(jì)
該智能檢測系統(tǒng)主要有主機(jī)和傳感器兩大部分,其中主機(jī)需要具備藍(lán)牙功能的移動(dòng)設(shè)備,傳感器則也需要具有藍(lán)牙通訊功能,并可以根據(jù)現(xiàn)場檢驗(yàn)的需要對傳感器模塊進(jìn)行自由增減。當(dāng)檢驗(yàn)員開始對某項(xiàng)目進(jìn)行檢驗(yàn)時(shí),對應(yīng)的傳感器模塊會(huì)自動(dòng)將檢測到的數(shù)據(jù)通過藍(lán)牙的方式發(fā)送到主機(jī),而主機(jī)在完成對于所有來自于傳感器模塊的數(shù)據(jù)讀取后,自動(dòng)將數(shù)據(jù)發(fā)送到無紙化檢驗(yàn)平臺(tái)中所預(yù)留的端口,從而實(shí)現(xiàn)檢驗(yàn)報(bào)告部分?jǐn)?shù)據(jù)的自動(dòng)錄入,系統(tǒng)的總體設(shè)計(jì)框圖如圖1所示。
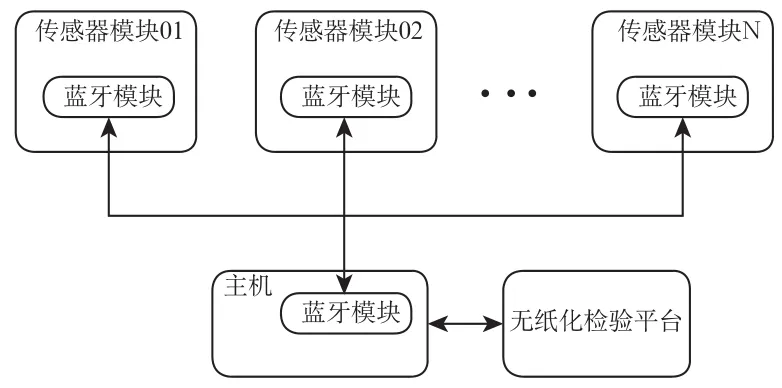
圖1 場(廠)內(nèi)機(jī)動(dòng)車智能檢測系統(tǒng)總體設(shè)計(jì)框圖
2 硬件設(shè)計(jì)
2.1 主機(jī)
主機(jī)可以是智能手機(jī)也可以是平板電腦,常規(guī)的筆記本電腦同樣可以作為主機(jī),如果筆記本電腦不帶藍(lán)牙通訊功能,也可以外接USB藍(lán)牙模塊來實(shí)現(xiàn)。
2.2 傳感器
本系統(tǒng)的傳感器有方向盤轉(zhuǎn)向力、方向盤轉(zhuǎn)角、踏板力/手剎力、喇叭噪音、制動(dòng)性能和貨叉下降速度等檢測模塊,每個(gè)模塊都沒有顯示屏,只有必要的工作指示燈、開關(guān)/復(fù)位按鈕,傳感器模塊組成框圖如圖2所示。
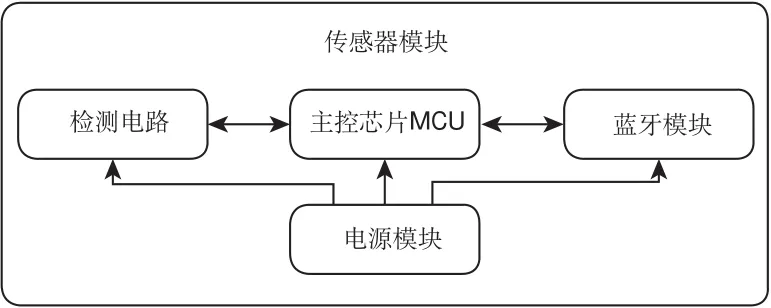
圖2 傳感器模塊組成框圖
●2.2.1 主控芯片MCU
對于方向盤轉(zhuǎn)向力、踏板力、手剎力以及喇叭噪音等無須復(fù)雜換算處理的采集部分,采用STC89C52單片機(jī)作為主要主控芯片,具有8K字節(jié)的Flash,512字節(jié)RAM,3個(gè)16位定時(shí)器/計(jì)數(shù)器,4個(gè)外部中斷,工作頻率最高可達(dá)40MHz,從而實(shí)現(xiàn)對來自于傳感器的數(shù)據(jù)進(jìn)行采集和濾波,并最終將數(shù)據(jù)通過藍(lán)牙無線的方式發(fā)送給主機(jī)。
而對于制動(dòng)性能、貨叉下降速度和方向盤轉(zhuǎn)角的檢測,由于都采用基于MPU9250芯片來實(shí)現(xiàn),因此,采用STM32F103芯片作為MCU,最高頻率可達(dá)72MHz[5],從而實(shí)現(xiàn)了對于加速度數(shù)據(jù)和角速度數(shù)據(jù)的高速采集、解算和最后的藍(lán)牙發(fā)送。
●2.2.2 檢測電路
喇叭噪音、制動(dòng)性能、貨叉下降速度和方向盤轉(zhuǎn)角所使用的前端感知單元都為數(shù)字信號輸出,因此,由MCU直接讀取,而對于方向盤轉(zhuǎn)向力、踏板力、手剎力的檢測,由于力的前端感知單元為模擬量輸出,則采用A/D轉(zhuǎn)換電路將力的模擬信號轉(zhuǎn)化為MCU能夠識(shí)別的數(shù)字信號。A/D轉(zhuǎn)換采用AD7705來完成,該芯片為16位雙通道ADC芯片,兼容SPI[6],從而大大減少了對于MCU的IO口資源的要求,AD7705的電路圖如圖3所示。
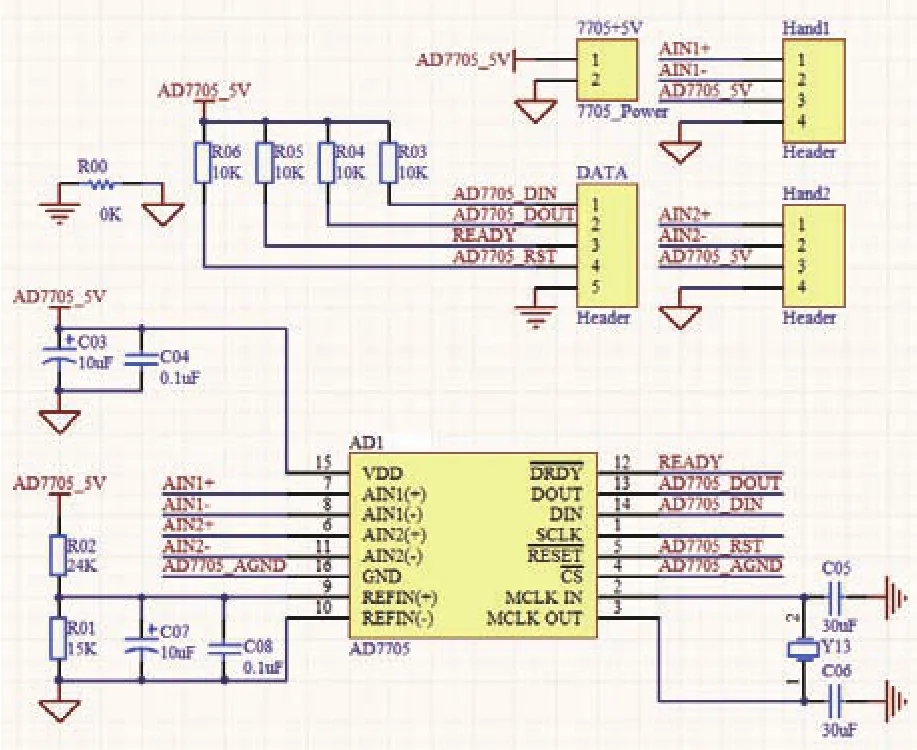
圖3 AD7705的A/D轉(zhuǎn)換電路原理圖
●2.2.3 電源模塊
本系統(tǒng)的電源種類有三大類:力前端感知部分的電壓為10V,噪音模塊和STC89C52單片機(jī)的電壓為5V,STM32F103芯片、MPU9250芯片和CC2540F128藍(lán)牙芯片的電壓為3.3V。電池則采用了12V和5V的鋰電池組,分別用于測量力的傳感器模塊和基于加速度檢測的傳感器模塊。本系統(tǒng)通過采用LM2596S芯片來實(shí)現(xiàn)對于從鋰電池組的電壓穩(wěn)壓到各個(gè)芯片所需要的穩(wěn)定電壓,其中的12V轉(zhuǎn)5V的穩(wěn)壓電路如圖4所示:
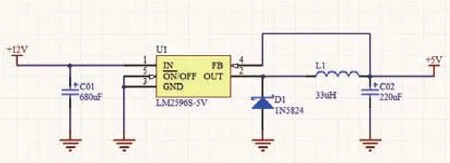
圖4 基于LM2596S的穩(wěn)壓電路圖
●2.2.4 藍(lán)牙模塊
本系統(tǒng)采用CC2540F128作為藍(lán)牙傳輸芯片,使用更少的連接的協(xié)定,相比采用傳統(tǒng)藍(lán)牙模塊,大幅降低了功耗和啟動(dòng)時(shí)間[7]。
3 軟件設(shè)計(jì)
軟件部分包括上位機(jī)軟件和下位機(jī)軟件。上位機(jī)軟件主要有數(shù)據(jù)顯示、數(shù)據(jù)判定、數(shù)據(jù)操作、傳感器遠(yuǎn)程操作和藍(lán)牙通訊,軟件框圖如圖5所示;下位機(jī)軟件主要有A/D轉(zhuǎn)換、各項(xiàng)檢測數(shù)據(jù)的濾波換算以及藍(lán)牙通訊。
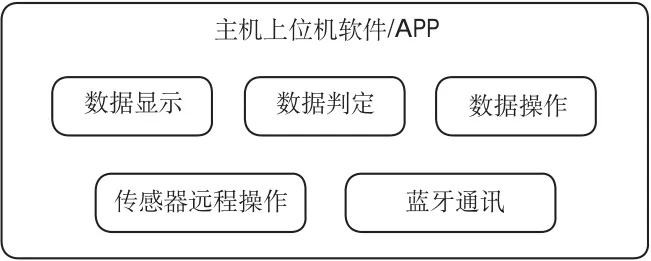
圖5 系統(tǒng)上位機(jī)軟件框圖
3.1 上位機(jī)
上位機(jī)軟件有Windows軟件和移動(dòng)端的Android/IOS版本APP,從而兼容現(xiàn)有移動(dòng)設(shè)備。軟件顯示檢驗(yàn)編號、檢驗(yàn)項(xiàng)目、對應(yīng)的實(shí)時(shí)數(shù)據(jù)等信息,并對數(shù)據(jù)進(jìn)行是否合格的自動(dòng)判定和顯示,與此同時(shí),可實(shí)現(xiàn)與傳感器模塊的藍(lán)牙通訊,對上位機(jī)接收到的檢驗(yàn)數(shù)據(jù)進(jìn)行“清除緩存”、“保存本地”和“上傳數(shù)據(jù)”的操作,還能夠?qū)τ趥鞲衅髂K進(jìn)行“清除緩存”和“零位校正”操作,上位機(jī)軟件界面如圖6所示。
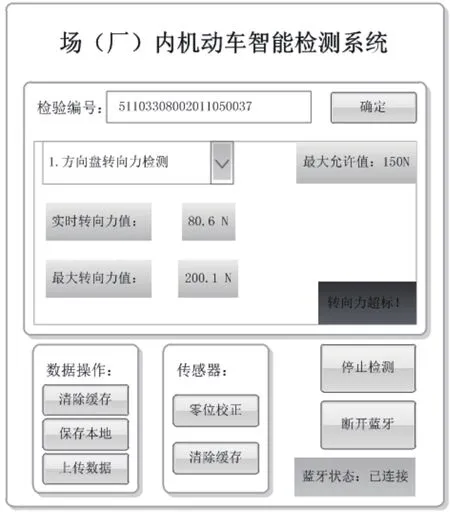
圖6 上位機(jī)軟件界面
3.2 下位機(jī)
下位機(jī)則根據(jù)不同的前端感知單元,采用對應(yīng)的通訊協(xié)議,從而獲得實(shí)時(shí)檢測數(shù)據(jù),并進(jìn)行均值濾波。對于本系統(tǒng)所涉及的檢驗(yàn)項(xiàng)目需要進(jìn)行最大值判定的,采用冒泡法來獲得當(dāng)前的最大值,最終將實(shí)時(shí)的檢測數(shù)據(jù)和當(dāng)前最大值數(shù)據(jù)通過藍(lán)牙發(fā)送到主機(jī),而對于基于加速度值的檢驗(yàn)項(xiàng)目,則在獲得實(shí)時(shí)的加速度值和角速度值后,通過坐標(biāo)解算和積分獲得運(yùn)動(dòng)方向上的加速度值、速度值、位移以及角度值,最終將數(shù)據(jù)結(jié)果通過藍(lán)牙發(fā)送到主機(jī)。所有數(shù)據(jù)的藍(lán)牙發(fā)送格式為波特率9600bps,數(shù)據(jù)位8位,停止位1位,無奇偶校驗(yàn)。
4 結(jié)束語
基于藍(lán)牙無線通訊技術(shù)的用于場(廠)內(nèi)機(jī)動(dòng)車檢測的智能系統(tǒng),能夠?qū)崿F(xiàn)多項(xiàng)檢測項(xiàng)目的同時(shí)進(jìn)行,故能夠提高檢驗(yàn)效率,而且由于傳感器端的屏幕和不必要的按鍵的取消,本檢測系統(tǒng)成套設(shè)備總質(zhì)量相比傳統(tǒng)的檢驗(yàn)儀器(相同的檢測項(xiàng)目)減輕了近50%,總體積上則減小約20%。通過試驗(yàn)表明,采用本系統(tǒng)的檢驗(yàn)總時(shí)間上相比傳統(tǒng)設(shè)備縮短了近20%,與此同時(shí)還能有效杜絕檢驗(yàn)員因數(shù)據(jù)讀取錯(cuò)誤而導(dǎo)致的檢驗(yàn)結(jié)論錯(cuò)誤的現(xiàn)象,因此,采用該系統(tǒng)對場(廠)內(nèi)機(jī)動(dòng)車進(jìn)行檢驗(yàn)可以大幅降低檢驗(yàn)員攜帶設(shè)備的負(fù)擔(dān),同時(shí)縮短檢驗(yàn)時(shí)間和降低了勞動(dòng)強(qiáng)度,使得檢驗(yàn)變得智能化。
[1] 王宇迪.叉車安全技術(shù)檢驗(yàn)與日常維護(hù)保養(yǎng)[J].工程技術(shù)研究,2016,17(06):188.
[2] 張健,郭琦,陳照春,等. 便攜式廠車工作裝置檢測系統(tǒng)的研發(fā)與應(yīng)用[J].機(jī)電技術(shù),2016,14(04):83-84.
[3] 吳梅英.叉車門架性能綜合測試系統(tǒng)[D].杭州:浙江大學(xué),2013:1-2.
[4] 梁直晃.基于移動(dòng)GIS的特種設(shè)備監(jiān)管系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[D].成都:電子科技大學(xué),2014:13-15.
[5] 張蕉蕉,曹森,郭堅(jiān)毅,等.基于STM32F103裝備數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)[J].裝備制造技術(shù), 2012,12(07):307-308.
[6] 劉偉, 張存善.基于PIC單片機(jī)和AD7705的高精度信號采集系統(tǒng)設(shè)計(jì)[J].電子設(shè)計(jì)工程, 2011,19(02):185-186.
[7] 丁磊,張彩祥,馮永晉,等.基于藍(lán)牙4.0的低功耗電子貨架標(biāo)簽設(shè)計(jì)[J].電子技術(shù)應(yīng)用,2014,40(05):28-29.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34